КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Расчет оптимальных параметров регуляторов
|
|
|
|
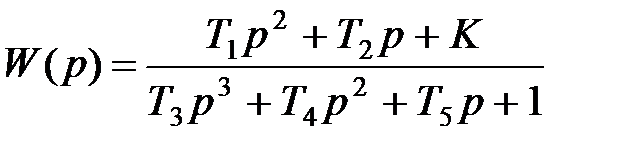
Согласно заданию, передаточная функция объекта управления имеет вид:
К = 100;
Т1 = 0,03c-1;
Т2 = 8,9 c-1;
Т3 = 65 c-1;
Т4 = 62 c-1;
Т5 = 9 c-1;
Ψ = 0,95.
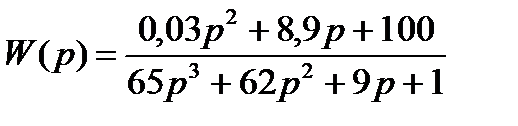
После подстановки числовых значений передаточная функция примет вид:
Далее, находится выражение инверсной расширенной амплитудно-фазовой характеристики объекта.
Согласно


Так как заданное значение Y = 0.95, то по формуле () определяется значение m и подставляем его в предыдущее выражение для расширенной амплитудно-фазовой характеристики.


Из расширенной амплитудно-фазовой характеристики находятся действительная  и мнимая
и мнимая  части.
части.
 ;
;

Перед тем, как определить оптимальные параметры настройки П, ПИ, ПИД регуляторов необходимо определить частоту среза объекта, которая находится из выражения для амплитудно-фазовой характеристики объекта управления. АФХ объекта получается после замены оператора р на jω в заданной передаточной функции объекта.
Таким образом, АФХ примет вид:

По формуле (), находится АЧХ объекта, на основании которой определяется частота среза.

где Re(w) – вещественная часть амплитудно-фазовой характеристики;
Jm(w) – мнимая часть амплитудно-фазовой характеристики.
АЧХ объекта управления имеет вид:

При нулевой частоте значение амплитуды равно 100.
Следовательно, w=wс, откуда по формуле

Таким образом, необходимо решить уравнение:
Корни этого уравнения можно найти любым удобным методом, но при этом необходимо учитывать только положительные вещественные корни.
Так как необходимо учитывать только положительные вещественные корни, то решением исходного уравнения являются следующий параметр w=wc = 0.14 с-1.
Для определения оптимальных параметров регулятора необходимо решить уравнение (). Приравняв вещественные и мнимые части в уравнении () к соответствующим параметрам регулятора.

Расчет оптимальных параметров настройки для П – регулятора производится следующим образом:

Из второго уравнения системы определяется w любым удобным способом с учетом положительных вещественных корней и подставляется в первое уравнение системы. В данном случае w = 0,134 с-1 и оптимальным параметром настройки П – регулятора является значение Кропт =0,272.
Для ПИ-регулятора расчет оптимальных значений параметров настройки производится следующим образом.
Для каждого значения частот от 0 до частоты среза определяются точки С1С0 и С1, соответствующие требуемой степени затухания . Оптимальным параметром является точка на линии, равной степени затухания С1С0 = f(С1), лежащая справа от глобального максимума.
Таким образом, для ПИ – регулятора по формуле () находятся параметры настройки:
Данные для построения графика зависимости С1С0=f(С1) для ПИ-регулятора приведены в таблице 1.
Таблица 1. Данные для определения параметров оптимальной настройки ПИ-регулятора.
Оптимальные параметры настройки для ПИД – регулятора в соответствии с формулой (2.18)

Данные для построения графика зависимости С1С0=f(С1) для ПИД-регулятора приведены в таблице 2.
Таблица 2. Данные для определения параметров оптимальной настройки ПИД-регулятора
| w | c0 | c1 | c0*c1 | a |
| #ДЕЛ/0! | #ДЕЛ/0! | |||
| 0,1 | 0,111936 | 0,088878 | 0,009949 | 0,125 |
| 0,2 | 0,157728 | 0,133495 | 0,021056 | 0,25 |
| 0,3 | 0,19207 | 0,162066 | 0,031128 | 0,375 |
| 0,4 | 0,220149 | 0,173042 | 0,038095 | 0,5 |
| 0,5 | 0,243982 | 0,162176 | 0,039568 | 0,625 |
| 0,6 | 0,264619 | 0,124297 | 0,032891 | 0,75 |
| 0,7 | 0,282703 | 0,053758 | 0,015198 | 0,875 |
| 0,8 | 0,298678 | -0,05539 | -0,01654 | |
| 0,9 | 0,312875 | -0,20931 | -0,06549 | 1,125 |
| 0,969 | 0,321778 | -0,34493 | -0,11099 | 1,21125 |
| 0,325565 | -0,41435 | -0,1349 | 1,25 |
График зависимости С1С0=f(С1) для ПИД-регулятора приведен на рисунке 8.
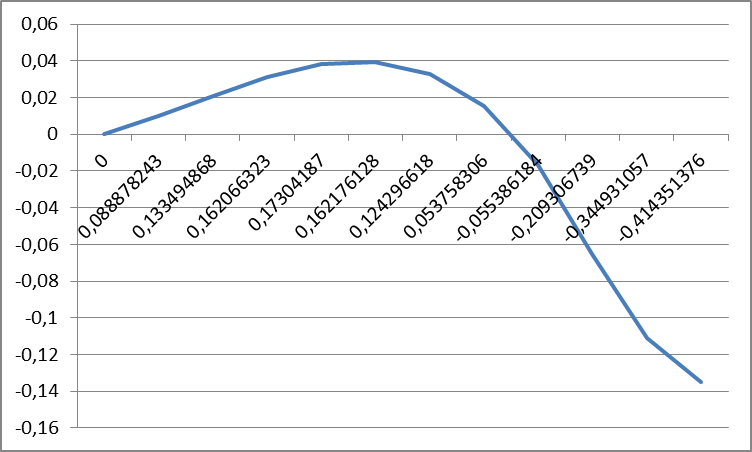
Рисунок 8. График зависимости С1С0 = f(C1) для ПИД – регулятора
Максимальное значение функции С1С0 =0.039568 при С1 = 0.162176. Необходимо выбрать точку правее глобального максимума. Следовательно можно взять С1 =0.53758, С1С0 = 0.015198. В результате решения системы уравнений определяются оптимальные параметры настройки:
 ,
,
 ,
,
 .
.
2.2 Выбор оптимального регулятора на основе экспериментальных исследований
В соответствии с заданием курсовой работы необходимо выполнить проверку рассчитанных параметров регуляторов в программах электронного моделирования. С помощью пакета Simulink программы MATLAB строится модель исследуемой системы с различными типами регуляторов и по виду переходной характеристики выбирается оптимальный регулятор.
Модель исследуемой системы П-регулятора (рис.9).
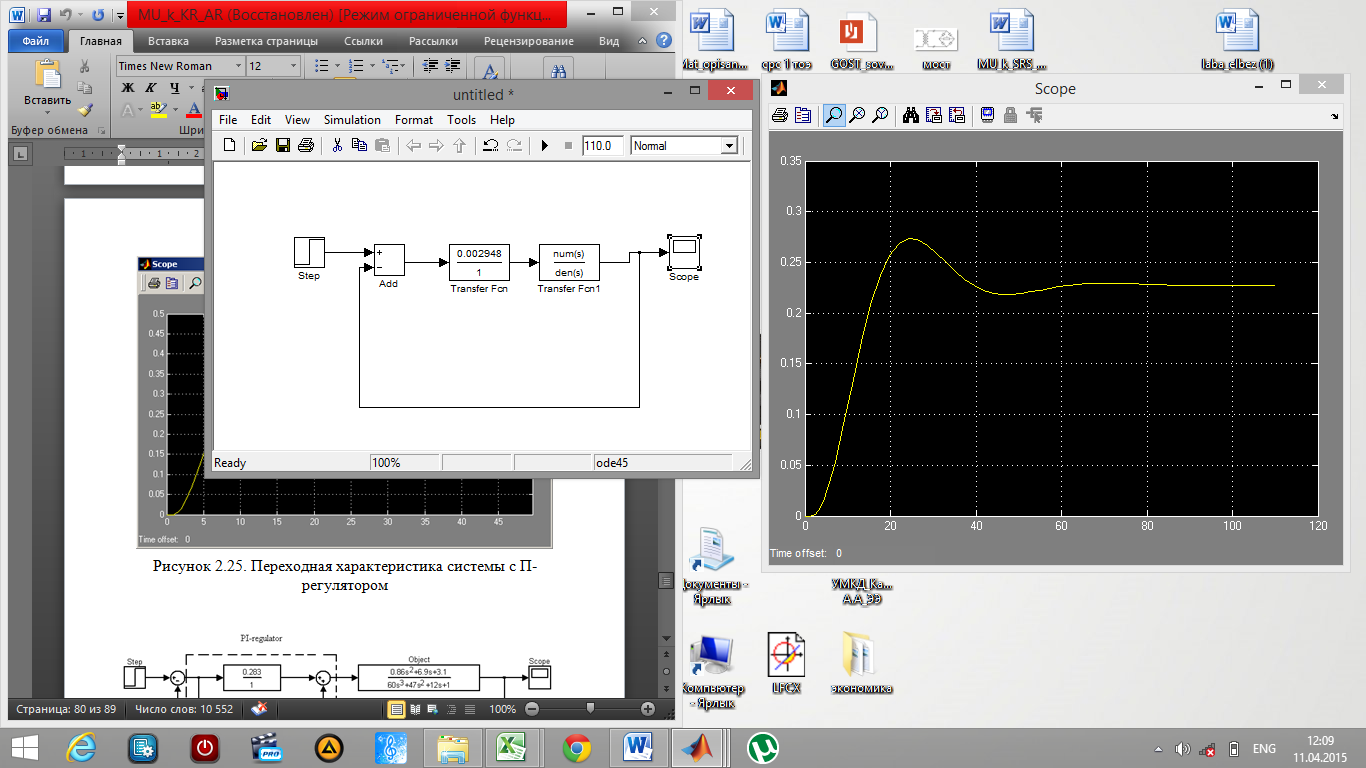
Рисунок 9. Модель системы П-регулятора
Переходная система характеристики исследуемой модели приведена на рисунке 10.
Рисунок 10. Переходная характеристика системы
ПИД-регулятор можно представить как параллельное соединение пропорционального, интегрирующего и дифференцирующего звеньев. Коэффициент передачи пропорционального звена в соответствии с расчетом, приведенным выше, равен 0.0538, коэффициент передачи интегрирующего звена равен  , коэффициент передачи дифференцирующего звена равен
, коэффициент передачи дифференцирующего звена равен  . Таким образом, модель исследуемой системы с ПИД-регулятором приведена на рисунке 12
. Таким образом, модель исследуемой системы с ПИД-регулятором приведена на рисунке 12
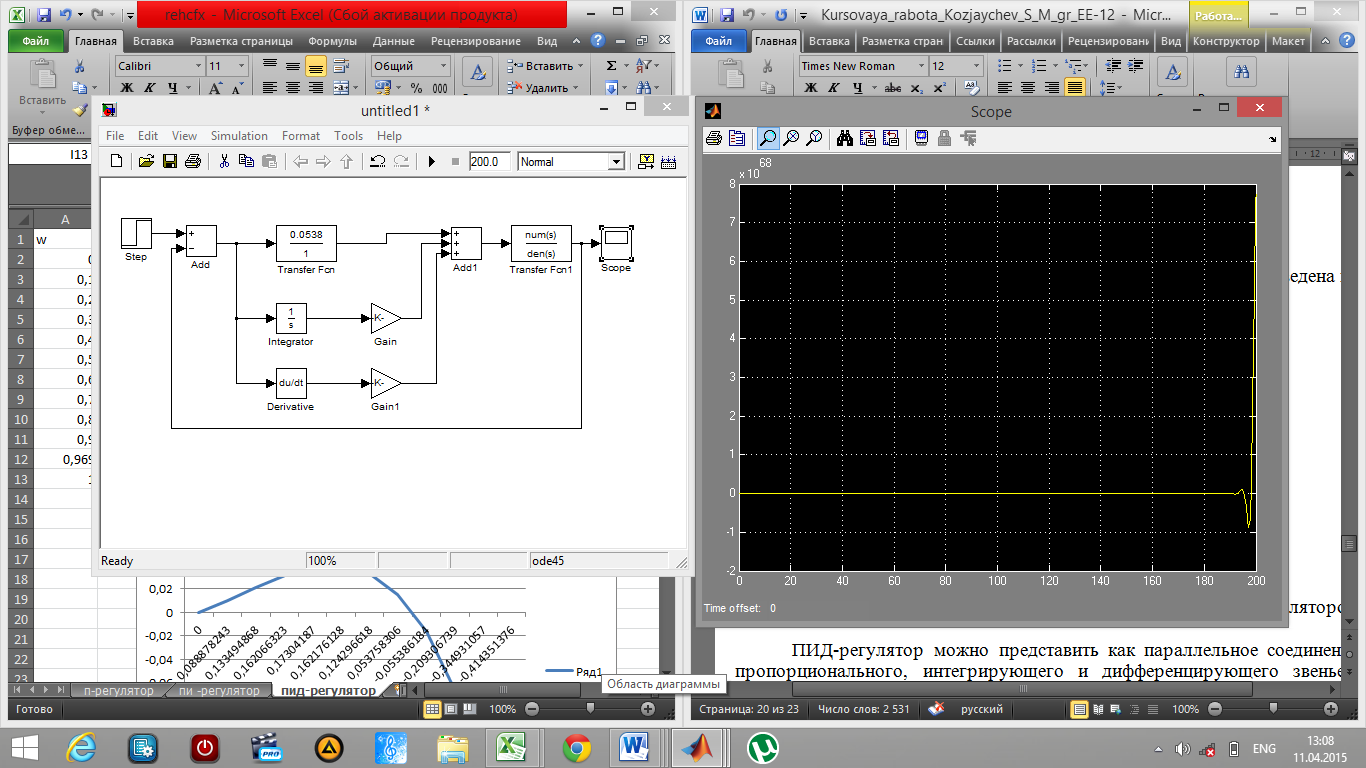 Рисунок 12. Модель системы с ПИД-регулятором
Рисунок 12. Модель системы с ПИД-регулятором
Переходная характеристика системы с ПИД-регулятором приведена на рисунке 14.
Рисунок 14. Переходная характеристика системы с ПИД-регулятором
Для заданного объекта управления оптимальным является П-регулятор, так как у ПИ-регулятора и ПИД-регулятора наблюдается расхождение переходного процесса.
|
|
|
|
Дата добавления: 2015-08-31; Просмотров: 1673; Нарушение авторских прав?; Мы поможем в написании вашей работы!