1. Технология консервирования плодов, овощей, мяса и рыбы / под ред. проф. Б.Л. Флауменбаума. 2-е изд. Перераб. и доп. –М.: Колос,1993. - 320с.
2. Сборник технологичеких инструкций по производству консервов.-М.: Асс. Предпр. плодов. пром-сти “Консервплодоовощ”,1990.- Т.1.Консервы овощные.-324с.
3. Проектування підприємств плодоовочевої консервної промисловості. ВИТП – СГіП-46-2596 “Відомчі норми технологічного проектування України”. -Київ: Мінсільгосппрод України,1996.-част.1.-38с.,част.2.-102с.
4. Химичиский состав пищевых продуктов / под ред. акад. А.А.Покровского.-М.: Пищ. пром-сть, 1976.-228с.
5. Справочник технолога плодоовощного консервного производства / под ред. В.И.Рогачева.-М.:Легкая и пищевая пром-сть,1983.-408с.
6. Ситников Е.Д., Коганов В.А. Оборудование консервных заводов. -М.:Лег. И пищ. пром-сть,1981-248с.
7. Фан-Юнг А.Ф. Проектирование консервных заводов.- М.: Пищ. пром-сть,1976.-305с.
8. Методичні вказівки до виконання продуктового розрахунку по курсовому проектуванні студентами спеціальності 7.091706 “ Технологія зберігання, консервування та переробки плодів та овочів ”. - Одеса ОДАХТ, 1999.-44с.
по дисциплине: «Идентификация и моделирование технологических объектов»
на тему: «Частотное регулирование асинхронного привода»
Выполнил: ст. гр. АКГ – 05
Богданец А.О.
Приняли: ст. преп. Склярова Г.А.
асс. Марусей О.В.
Алчевск, 2008
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
При современном состоянии автоматического управления идентификация сложных динамических производственных объектов представляет собой весьма актуальную задачу. Сложность этой задачи быстро возрастает по мере перехода к автоматизации все более сложных технологических объектов управления и целых производственных комплексов. При этом приходится иметь дело с объектами, полное априорное математическое описание которых, как правило, отсутствует.
Знание динамических характеристик объекта (здесь под термином «объект» будем понимать как непосредственно объект управления, так и систему управления в целом) дает возможность решить два типа задач автоматического управления.
1. Задачу синтеза системы управления стандартного типа. Для решения этой задачи необходимо предварительное исследование объекта в условиях, которые, вообще говоря, могут существенно отличаться от режима нормального функционирования.
2. Задачу синтеза адаптивной системы управления. В этом случае для достижения цели управления система изменяет свои управляющие сигналы, приспосабливаясь к изменению входных сигналов, внешних воздействий, характеристик объектов и т. д. Построение систем такого рода требует определения динамических характеристик, объекта в режиме его нормального функционирования.
Задачи идентификации:
Идентификацией называется «определение параметров и структуры математической модели, обеспечивающих наилучшее совпадение выходных координат модели и процесса при одинаковых входных воздействиях».
Отсюда следует, что процедура идентификации распадается на следующие три этапа:
1. Выбор структуры модели на основании имеющейся априорной информации об исследуемом процессе и некоторых эвристических соображений.
2. Выбор критерия близости объекта и модели, основанный на специфике задачи.
3. Определение параметров модели, оптимальных с точки зрения выбранного критерия близости.
Таким образом, при выбранной структуре модели задача идентификации представляет собой типичную экстремальную задачу, и для ее решения можно с успехом использовать мощный аппарат теории задач такого рода.
Выбор структуры модели определяется априорной информацией об исследуемом процессе, а также требованиями к точности моделирования и реализуемостью вычислений, ограниченной размерностью задачи.
Идентификация динамических систем сводится к задаче создания математической модели, адекватной данной динамической системе [1]. Решение этой задачи в значительной степени неоднозначно. Чтобы получить математическое описание физической системы, необходимо, во-первых, построить идеализированную физическую модель процесса, во-вторых, аппроксимировать эту идеализированную модель. Поэтому при использовании полученной математической модели необходимо соблюдать известную осторожность, помня о допущениях, принятых при ее построении.
Моделированию сложных динамических систем должны сопутствовать в интересах сокращения объема вычислений преобразование и упрощение уравнений математической модели, понижение их порядка, линеаризация и т. д. Естественно, уравнения упрощенной и полной математических моделей не равнозначны.
Выбор вида математической модели – важнейшая задача при идентификации динамических объектов.
1 ПОСТРОЕНИЕ КОНЦЕПТУАЛЬНОЙ МОДЕЛИ СИСТЕМЫ
1.1 Частотное регулирование скорости асинхронного двигателя
Применение частотного регулирования скорости значительно расширяет возможности использования асинхронных электроприводов в различных отраслях промышленности. В первую очередь это относится к установкам, где производится одновременное изменение скорости нескольких асинхронных двигателей, приводящих в движение, например, группы текстильных машин, конвейеров, рольгангов и т. п. Используется частотный принцип регулирования скорости асинхронных двигателей и в индивидуальных установках, особенно в тех случаях, когда необходимо получить от механизма высокие угловые скорости, например, для центрифуг, шлифовальных станков и т. д. Питание асинхронных двигателей осуществляется при этом не от общей сети, а от преобразователя частоты ПЧ, показанного на рисунке 1, энергия к которому подводится от сети постоянной частоты f1c и напряжения U1c. На выходе преобразователя, как правило, меняется не только частота f1 но и напряжение U1. Для преобразования частоты могут быть использованы электромашинные или полупроводниковые устройства, различающиеся по принципу действия и конструкции. Возможность изменения скорости асинхронного двигателя при регулировании частоты f1 следует непосредственно из выражения
из которого видно, что синхронная скорость асинхронного двигателя прямо пропорциональна частоте напряжения статора. При регулировании частоты возникает также необходимость регулирования напряжения источника питания. Действительно, э. д. с. обмотки статора асинхронного двигателя пропорциональна частоте и потоку.
(1.1)
С другой стороны, пренебрегая в первом приближении падением напряжения на сопротивлениях обмотки статора, т. е. полагая можно записать:
или с учетом (1.1)
(1.2)
Из приведенного выражения следует, что при неизменном напряжении источника питания U1 и регулировании его частоты изменяется магнитный поток асинхронного двигателя. В частности, уменьшение частоты f1 приводит к возрастанию потока и как следствие к насыщению машины и увеличению тока намагничивания, что связано с ухудшением энергетических показателей двигателя, а в ряде случаев и с его недопустимым нагревом. Увеличение частоты f1 приводит к снижению потока двигателя, что при постоянном моменте нагрузки на валу в соответствии с выражением М = k ФI2cosφ2 приводит к возрастанию тока ротора, т. е. к перегрузке его обмоток по току при недоиспользованной стали. Кроме того, с этим связано снижение максимального момента и перегрузочной способности двигателя [2].
Для наилучшего использования асинхронного двигателя при регулировании скорости изменением частоты необходимо регулировать напряжение одновременно в функции частоты и нагрузки.
Регулирование напряжения лишь в функции одной частоты с учетом характеристики механизма может быть реализовано в разомкнутых системах частотного управления.
Регулирование напряжения в функции нагрузки можно осуществить, как правило, лишь в замкнутых системах, в которых при использовании обратных связей напряжение при данной частоте может изменяться в зависимости от нагрузки.
Изменение частоты источника питания позволяет регулировать скорость асинхронного двигателя как выше, так и ниже основной. Обычно при регулировании выше основной скорости частота источника питания превышает номинальную не более чем в 1,5—2 раза. Указанное ограничение обусловлено прежде всего прочностью крепления обмотки ротора. Кроме того, с ростом частоты питания заметно увеличиваются величины мощности потерь, связанные с потерями в стали статора. Регулирование скорости вниз от основной, как правило, осуществляется в диапазоне до 10—15. Нижний предел частоты ограничен сложностью реализации источника питания с низкой частотой, возможностью неравномерности вращения и рядом других факторов. Таким образом, частотное регулирование скорости асинхронного двигателя может осуществляться в диапазоне до 20—30. Использование двигателей специальной конструкции дает возможность расширить диапазон регулирования за счет увеличения верхнего предела скорости. Нижний предел скорости может быть уменьшен путем введения в схему управления различных обратных связей.
Если при регулировании частоты напряжение изменяется таким образом, что Ф = const, то допустимый момент на валу асинхронного двигателя при частотном регулировании скорости также будет неизменным (МДОП = const).
1.2 Закон изменения напряжения при частотном регулировании скорости асинхронного двигателя
При выборе соотношения между частотой и напряжением, подводимым к статору асинхронного двигателя, чаще всего исходят из условия сохранения перегрузочной способности асинхронного двигателя, т. е. кратности критического момента к моменту статической нагрузки, для любой из регулировочных механических характеристик:
Пренебрегая падением напряжения на обмотке статора и учитывая, что хК = f1 и ω0 = f1 можно найти:
где А – коэффициент, не зависящий от напряжения и частоты.
Тогда для любой частоты f1j источника питания и соответствующей ей угловой скорости ωj можно записать:
где U1j – фазное напряжение источника питания (соответственно и на обмотке статора асинхронного двигателя) при частоте f1j;
МC (ωj) – момент статической нагрузки на валу двигателя при скорости
Из последнего выражения следует, что для любых двух значений регулируемой частоты f1j и f1k должно соблюдаться соотношение
Отсюда следует основной закон изменения напряжения при частотном регулировании скорости асинхронного двигателя
(1.3)
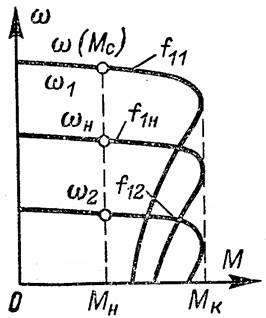
Рисунок 1 – Механические характеристики асинхронного двигателя при частотном регулировании скорости для случая λ = const при MC = const
1.3 Преобразователи частоты
В системах автоматизированного электропривода находят применение различные типы преобразователей частоты, которые могут быть разделены на две группы: электромашинные преобразователи и вентильные преобразователи
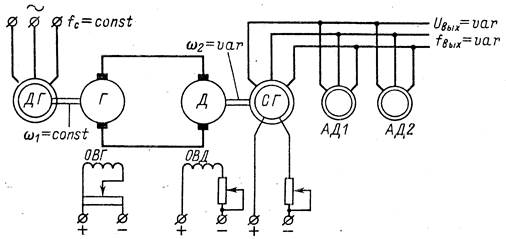
Рисунок 2 – Принципиальная схема асинхронного электропривода с электромашинным преобразователем частоты, выполненным на базе синхронного генератора.
При использовании первых источником напряжения переменной частоты служат электрические машины переменного тока. На рисунке 2 регулируемые асинхронные двигатели АД1 и АД2 присоединены к электромашинному преобразователю частоты с синхронным генератором. Частота fВЫХ выходного напряжения синхронного генератора СГ связана с его угловой скоростью ω соотношением
где р – число пар полюсов СГ.
Для изменения fВЫХ необходимо регулировать скорость ω2. Синхронный генератор приводится от двигателя постоянного тока Д, управляемого по системе генератор – двигатель с помощью агрегата постоянной скорости, включающего в себя генератор постоянного тока Г и его приводной двигатель ДГ. В качестве последнего может быть использован синхронный или асинхронный двигатель.
Регулирование скорости СГ, а тем самым и выходной частоты производится теми же способами, что и в обычной системе Г – Д, т. е. изменением тока возбуждения генератора Г и дополнительно тока возбуждения двигателя Д. Величина выходного напряжения fВЫХ регулируется изменением тока возбуждения СГ.
Если мощность, потребляемая от сети переменного тока регулируемой частоты, равна Рн, то, учитывая, что эта мощность проходит через все машины преобразователя, найдем суммарную установленную мощность машин преобразователя без учета потерь в них
При выборе машин конкретного преобразователя необходимо учитывать потери энергии в них. Поэтому в действительности полная установленная мощность преобразователя более чем в 4 раза превосходит мощность нагрузки.
Достоинства рассмотренного преобразователя состоят в возможности раздельного регулирования выходного напряжения и выходной частоты и в возможности применения стандартных электрических машин для преобразования.
Электромашинные преобразователи частоты обладают существенными недостатками, основными из которых являются большие габариты преобразователя и значительная его инерционность, связанная с необходимостью изменения скорости преобразовательного агрегата при изменении выходной частоты. Эти недостатки ограничивают область применения электромашинных преобразователей и приводят к необходимости использования вентильных (статических) преобразователей частоты, в частности тиристорных, позволяющих повысить к.п.д. электроприводов и их быстродействие, а также уменьшить габариты.
Вентильные преобразователи частоты, предназначенные для регулирования скорости асинхронных, в первую очередь короткозамкнутых двигателей, должны обеспечивать требуемую частоту при отсутствии других генераторов в выходной цепи преобразователя и допускать раздельное регулирование частоты и напряжения с целью достижения оптимального режима частотного управления.
Среди статических вентильных преобразователей частоты выделяются две разновидности: преобразователи с непосредственной связью, в которых в одном устройстве совмещены функции выпрямления и инвертирования, и преобразователи с промежуточным звеном постоянного тока. Область применения первых ограничена зоной низких частот – примерно от 10 Гц и ниже при частоте питающей сети 50 Гц. Более универсальны преобразователи с промежуточным звеном постоянного тока, которые позволяют регулировать частоту на выходе в очень широких пределах от нескольких тысяч герц до десятых и сотых долей герца независимо от значения частоты питающей сети.
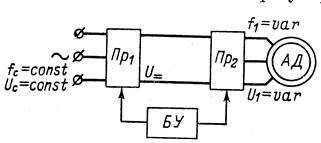
Рисунок 3 – Структурная схема асинхронного регулируемого электропривода с вентильным преобразователем частоты, имеющим промежуточное звено постоянного тока.
На рисунке 3 приведена блок-схема преобразователя с промежуточным звеном постоянного тока. Преобразователь состоит из трех основных узлов: ПР1 осуществляющего преобразование энергии от питающей сети переменного тока с напряжением UС и частотой fС в энергию постоянного тока при регулируемом напряжении U = var; ПР2 представляющего собой автономный инвертор с регулируемой частотой f1 = var на выходе, и блока управления БУ. Блок управления имеет два канала для раздельного регулирования напряжения и частоты. Регулирование напряжения осуществляется с помощью ПР1 как в выпрямительном, так и в инверторном режиме. В первом случае АД работает в двигательном режиме, во втором – в режиме рекуперативного торможения.
В системах автоматизированного электропривода в зависимости от мощности преобразователя и глубины регулирования напряжения используются различные виды выпрямителей: однофазные, трехфазные, мостовые и с нулевой точкой, симметричные, несимметричные и т. п.
Выпрямленное, в общем случае регулируемое по величине, напряжение инвертируется, т. е. преобразуется в трехфазное переменное напряжение регулируемой частоты посредством автономного инвертора ПР2. Выходное напряжение таких инверторов в большинстве случаев несинусоидальное.
2 АЛГОРИТМИЗАЦИЯ МОДЕЛИ, РАСЧЕТ ЕЕ ПАРАМЕТРОВ И РЕАЛИЗАЦИЯ НА ЭВМ
2.1 Исходные данные для расчета параметров математической модели
Шахтная подъемная установка МПБ 5-2,5-2,5
Диаметр барабана по оси первого слоя каната, м – DБ = 5
Ширина заклиненного барабана, м – 2,5
Ширина переставного барабана, м – 2,5
Статическое напряжение каната, кН, не более – 320
Разность статического напряжения каната, кН, не более – 250
Скорость натяжения каната наибольшая (скорость подъема), м/с – 14
Маховый момент машины (без эл. двигателя, канатов, копровых
шкивов) при навивке каната, кН/м2 – (GD2)Б = 10170
Масса машины (без эл. двигателя, запчастей и инструмента) при
навивке каната, т: – 153,6
Шкивы копровые Ш6А
Диаметр навивки, мм – DШ = 6000
Максимальный диаметр навиваемого каната, мм – 60
Расстояние между осями подшипников 1160/1020
Наибольшее суммарное разрывное усилие всех проволок
Допустимый статический момент на тихоходном ходу, кН·м2 – 820
Передаточное отношение i = 10,59
Допустимая частота вращения на приводном (быстроходном) валу
мин-1, – 500
Момент инерции зубчатой передачи редуктора относительно
тихоходного вала, присоединяемого к валу подъемной
машины, кг·м2 – 62500
Рисунок 4 – Кинематическая схема шахтной подъемной установки
2.2 Расчет параметров математической модели
Для измерения угловой скорости используется внесистемная единица – об/мин. Угловая скорость, определяемая числом оборотов в минуту (частота вращения), обозначается через n, а радианами в секунду – через ω. Определим угловую скорость ротора ω зная, что зависимость между n и ω определяется уравнением [3]:
(2.1)
Определим ω0 – угловую скорость поля двигателя, называемую синхронной:
Мощность, передаваемую ротору, можно разделить на две составляющие: 1) мощность, преобразуемую в механическую РМ; 2) мощность потерь ΔРЭЛ.2 в роторе. Первая составляющая может быть определена следующим образом Р = М·ω. Выразим и определим М – номинальный электромагнитный момент, развиваемый двигателем:
(2.2)
Зная значение номинального электромагнитного момента определим момент сопротивления на валу двигателя:
(2.3)
Определим величину номинального скольжения S по формуле:
(2.4)
Максимальное значение момента МК, развиваемого двигателем, принято называть критическим. Определим его, зная кратность максимального момента в двигательном режиме по отношению к номинальному моменту λ = ММАХ/МНОМ:
(2.5)
Соответственно МК скольжение SК так же называется критическим и для крупных двигателей определяется по формуле:
(2.6)
Определим электромагнитную постоянную времени:
(2.7)
Найдем радиус приведения усилия нагрузки к валу двигателя:
(2.8)
Найдем КПЧ:
(2.9)
Для оценки формы механической характеристики вводится понятие жесткости характеристики. Под жесткостью характеристики подразумевают производную момента по скорости, т.е.
(2.10)
Зная передаточное отношение редуктора ЦО-22, выразим угловую скорость барабана ШПУ ωБ:
(2.11)
Выразим скорость каната VК через угловую скорость ωШ и радиус RШ шкива, используя кинематическую схему ШПУ:
(2.12)
Используя формулу 2.11 выразим ωШ
(2.13)
Так как скорость движения груза равна скорости движения каната (VК = VГ), то найдем VГ подставив в формулу 2.12 выраженное из формулы 2.13 значение ωШ:
(2.14)
Обычно в каталогах для двигателей указывается величина махового момента GD2, выраженного в кгс·м2. В этом случае момент инерции в системе СИ вычисляется по формуле:
(2.15)
Приведение инерционных масс и моментов инерции механических звеньев к валу двигателя заключается в том, что эти массы и моменты инерции заменяются одним эквивалентным моментом инерции J на валу двигателя. При этом условием приведения является равенство кинетической энергии, определяемой эквивалентным моментом инерции, сумме кинетических энергий всех движущихся элементов механической части привода, т. е.
(2.16)
Отсюда
(2.17)
Учитывая кинематическую систему шахтной подъемной установки, изображенную на рисунке 4 получим:
(2.18)
Определим время разгона двигателя:
(2.19)
Найдем
(2.20)
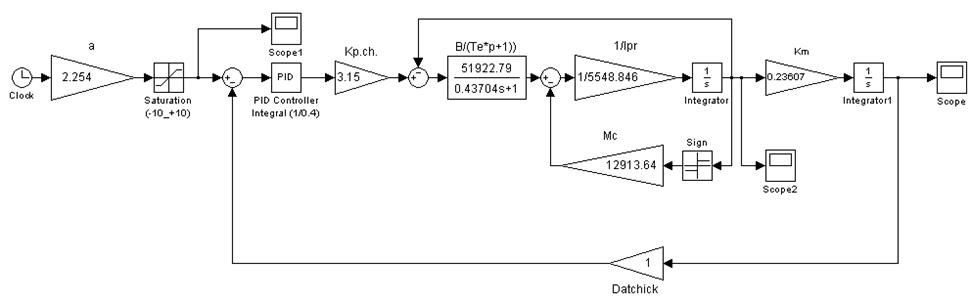
Рисунок 5 – Структура математической модели построенной в приложении Simulink MATLAB для исследования частотного регулирования асинхронного привода
studopedia.su - Студопедия (2013 - 2024) год. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав!Последнее добавление

 можно записать:
можно записать: