КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
И информатики
|
|
|
|
Кафедра «ВЫЧИСЛИТЕЛЬНАЯ ТЕХНИКА»
Сдана на проверку Допустить к защите
«_____»___________ 2004 г. «_____»___________2004 г.
Защищена с оценкой ______
«_____»___________2004 г.
Курсовая работа
По предмету Основы Теории
Управления
Пояснительная записка
на _18_ _листах
Студент (ка) группы ___ Царёва Е.В.
(Фамилия И. О.)
Руководитель ___ ___________ Тяжев А.И._
(Фамилия И. О.)
№ зач.книжки _02521___
Самара 2005 г.
Замечание
Содержание
Задание №1……………………………………………………………………………...4
Выполнение задания №1……………………………………………………………….5
Часть 1……………………………………………………………………………...5
Часть 2………………………………………………………………………….......5
Часть 3……………………………………………………………………………...7
Часть 4……………………………………………………………………………...8
Часть 5…………………………………………………………………………….10
Задание №2…………………………………………………………………………….12
Выполнение задания №2……………………………………………………………...12
Вывод…………………………………………………………………………………..17
Список используемой литературы…………………………………………………...18
Задание №1
Рассчитать параметры системы автоматического управления (САУ), осуществляющей автоматическое слежение за объектом перемещающемся в пространстве и излучаемом электромагнитные волны.
Структурная схема САУ:

Рис.1
РПУ - радиоприёмное устройство
ФД – фазовый детектор
КЗ – Корректирующее устройство
УМ – усилитель мощности
ЭД – электродвигатель
А – антенна с узкой диаграммой направленности
МОС – местная обратная связь
X=φц – азимут цели
Y=φа – азимут диаграммы антенны
С=x-y – ошибка слежения
Необходимо определить тип и параметры КЗ и МОС обеспечивающих качественные показатели САУ, численные значения которой определяются предпоследней N1 и последней N0 цифрами зачётки.
Исходные данные:
1) полоса пропускания: ωп=75+0.6*N1+1.2*N0=75(c-1)
2) показатель колебательности системы: M=1.38+0.02*N1=1.42
3) допустимые ошибки слежения:
а) по положению: e0=0
б) по скорости: e1=0.15°+0.01°N1-0.01°N0=0.16
в) по ускорению: e2=0.6°+0.01°N1-0.01°N0=0.61
ускорение изменения азимута:
 °/с,
°/с,  °/с2
°/с2
4) Параметры исходной части:
 ;
; 



После расчёта КЗ и МОС необходимо составить их функциональную схему с указанием значений сопротивлений, емкостей и коэффициентов усилений. А также проверить запас устойчивости системы по фазе, усилению и определить фактический показатель колебательности САУ Мф.
5) Используя билинейное Z – преобразование, необходимо рассчитать системные функции цифровых прототипов КЗ и МОС, и составить их структурные схемы для реализации на вычислительных машинах.
Выполнение задания №1.
1. Передаточная функция исходной части разомкнутой САУ без учёта КЗ и МОС равна:

Т.к. в передаточную функцию WРИ входит четыре инерционных звена первого порядка и интегратор, а гарантированно устойчивой является система только с двумя звеньями первого порядка, поэтому понадобиться включить минимально два корректирующих звена. Для упрощения расчётов возьмём два корректирующих звена с одинаковыми параметрами:
Т.к.
 - без усиления;
- без усиления;  - с усилением
- с усилением
то
При условии, что КЗ включены последовательно, общая передаточная функция разомкнутой системы будет равна:

где 
2. Коэффициенты ошибок по положению, скорости и ускорению по определению равны:

В нашем случае порядок астатизма ν=1
Необходимо чтобы:
 => k =62.5
=> k =62.5
 =>
=>  ; k КЗ =15.625 - ошибка по скорости
; k КЗ =15.625 - ошибка по скорости
Т.к.  , то используем не инвертирующий усилитель:
, то используем не инвертирующий усилитель:
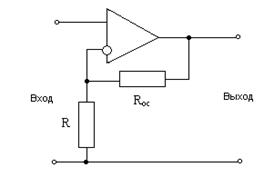
Рис.2
Из выражения для c2;
 , Т0 =1.922
, Т0 =1.922
Т.к.  и
и  , то ошибка по ускорению равна:
, то ошибка по ускорению равна:
 (1)
(1)
Построим ЛАЧХ разомкнутой системы:
 =>∆φ=0.781;
=>∆φ=0.781;
 => ωср =52.819;
=> ωср =52.819;

Проверим выполнение условия: 
52.819<81.967
Т.к. условие выполняется, то частота среза ЛАЧХ разомкнутой системы определяется только интегратором и двумя корректирующими звеньями.
Корректирующие звенья с отставанием по фазе:
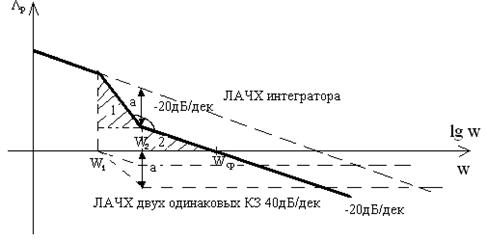
Рис.3

До частоты ω1 ЛАЧХ определяется интегралом:
На участке  :
:
1) 
2) 
 =>
=>  (2)
(2)
Решая совместно (1) и (2) получим:
 ,
, 
, 
3. Первое корректирующее звено включим последовательно после ФД. В него включим усилитель с коэффициентом kкз. Тогда схема корректирующего звена имеет вид:
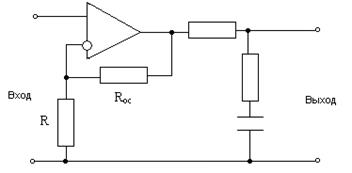
Рис.4
Коэффициент передачи инвертирующим усилителем: 
Пусть R =1000 Ом
 , R ос =14.63 кОм
, R ос =14.63 кОм
Зададим С =1·10-4 Ф и решая систему уравнений получим R1 и R2:
 =>
=> 
4. Второе КЗ реализуем по схеме включения через местную ОС (МОС), охватывающий звенья системы с нестабильными параметрами: УС, ЭД и А. Такое включение повышает стабильность параметров, охватывающих ОС звенья.
 , где
, где
 - передаточная функция, охваченных ОС звеньев.
- передаточная функция, охваченных ОС звеньев.
 - второе КЗ без усилителя
- второе КЗ без усилителя
Т.к.  , то до
, то до 
Тогда  , где
, где  =>
=> 
Аналитическое выражение дает информацию о том какие устройства нужно включать в МОС.
Передаточную функцию W0 реализуем последовательным соединением тахогенератора дифференциальной цепи с постоянной T2 и усилителя с коэффициентом усиления kУС. Передаточная функция тахогенератора:
Дифцепочка:
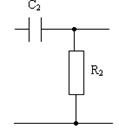
Рис.5
Определим kУС:
 =>
=> 
Общая функциональная схема местной обратной связи:
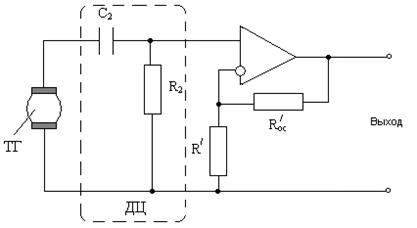
Рис.6

Зададим R/ =1000 Ом
 =>
=>  Ом
Ом
Фактические запасы устойчивости определяются по точкам ЛАЧХ и ЛФЧХ графо-аналитическим методом. Их надо запрограммировать.
ЛАЧХ:
 ЛФЧХ:
ЛФЧХ:

Произведём вычисления критической частоты и частоты среза, оценку устойчивости по амплитуде и фазе, а так же вычислим фактический показатель колебательности системы:
ωкр=63 > ωср =43.52
Согласно графикам ЛАЧХ и ЛФЧХ определили, что wср (частота среза) меньше wкр (критическая частота), что свидетельствует об устойчивости системы.
Определим запас устойчивости по амплитуде:
 => α дб =4.78
=> α дб =4.78
Т.к. полученное нами значение  , то данная система устойчива по амплитуде.
, то данная система устойчива по амплитуде.
Определим запас устойчивости по фазе:
 => ∆φ=0.44
=> ∆φ=0.44
Т.к. полученное нами значение  , то данная система устойчива по фазе.
, то данная система устойчива по фазе.
Определим фактический показатель колебательности:
 => Мф =2.35
=> Мф =2.35
 - это значение передаточной функции замкнутой системы на резонансной частоте.
- это значение передаточной функции замкнутой системы на резонансной частоте.
5. Используя билинейное z-преобразование, рассчитаем системные функции цифровых прототипов КЗ и МОС и составим их структурные схемы. Произведём билинейное z-преобразование для корректирующего звена:
Произведём замену  , где TД – время дискретизации
, где TД – время дискретизации
 , где FД – частота дискретизации
, где FД – частота дискретизации
По теореме Кательникова-Найквиста:
FД>2Fmax Fmax=Fв – частота пропускания
По определению:
 =>
=>  ,
,  =>
=> 
Следовательно => 
Получим

Произведём замену:

В результате получим уравнение:
 по определению
по определению 
В результате имеем:

Этому выражению соответствует следующая схема цифрового звена первого порядка:
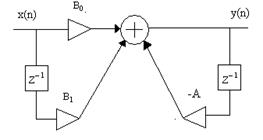
Рис.7
Передаточная функция с учётом коэффициентов будет иметь вид:
Проделав аналогичные преобразования для  получим:
получим:
 , где
, где
Этому выражению соответствует следующая схема цифрового звена второго порядка:
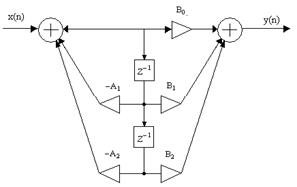
Рис.8
Передаточная функция с учётом коэффициентов будет иметь вид:

Задание №2
Разработать алгоритм и программу управления для станка с ЧПУ для изготовления шахматных фигур. Исходные данные определяются по последней N0 и предпоследней N1 цифре зачётки:
| № | Фигура | Высота | Диаметр |
| 0,1 | Пешка |
Заготовка из липы длинна 1400мм, диаметр 32мм.
Выполнение задания №2
1. Структурная схема токарного станка с ЧПУ и назначение:
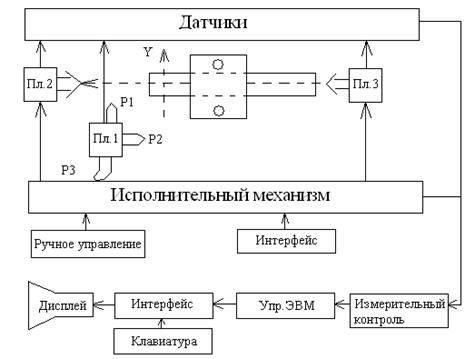
Рис.9
На платформе 1 закреплены резцы Р1, Р2, Р3. она может перемещаться вдоль осей x и y и поворачиваться вокруг оси по часовой и против часовой стрелки на заданный угол. Платформы 2 и 3 служат для зажима заготовки с торцов и могут перемещаться влево и вправо вдоль оси х на заданное расстояние. Патрон зажимает и разжимает заготовку и вращает её вокруг оси x заданной угловой скоростью. Платформа и патрон приводятся в движение исполнительными механизмами, состоящими из электродвигателей с редукторами в виде шестирёнчатых или червячных передач. Шестирёнчатая позволяет изменять скорость вращения, а червячная преобразовывать вращательные движения в поступательные. Датчики совместно с измерительным контроллерами контролируют пространственные координаты платформ, направление и скорость вращения платформ, а также угол их поворота, усилия при зажатии патроном заготовки, платформами 2 и 3, и передают эти данные в цифровых кодах в управляющую ЭВМ.
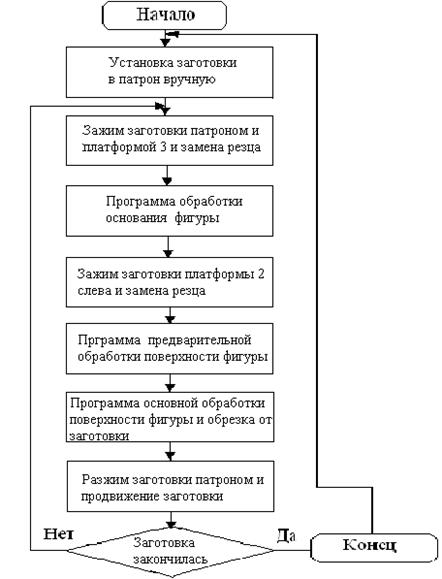
2. Структурная схема алгоритма изготовления шахматной фигуры на токарном станке с ЧПУ.
3. Чертёж шахматной фигуры с указанием размера.
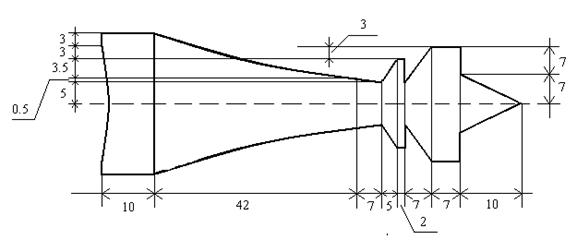
Рис.10
4. Разработка программы обработки основания фигуры:
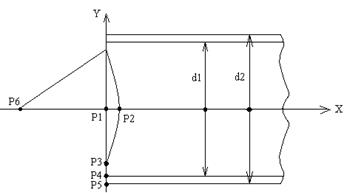
Рис.11
Программа обработки основания:
‘Ввод информации о геометрических объектах
%GENER(0)
P1=x0, y0
P2=x2, y0
P3=x0, y-12
P4=x0, y-15
P5=x0, y-16
P6=x-35, y0
P7=x-200, y-300
C1=p6, r37
‘Обработка основания фигуры
%CUTTER(100)
%FROM(7, 100) – исходная точка
m0=P1 – позиционирование в P1
m1=P2 – снятие 2мм материала
m2=P2, C1, P3 – от P2 к P3 по дуговой интерполяции
m1=P4 – линейное движение в P4
m1=P5 – линейное движение в P5
m99 – конец платформы и возвращение в исходную позицию.
5. Разработка программы предварительной обработки поверхности фигуры.
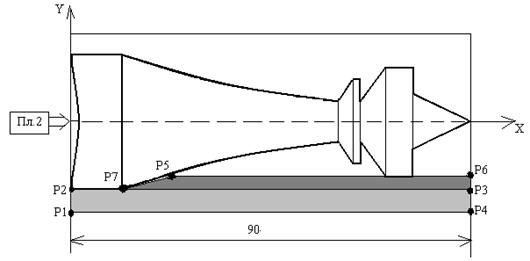
Рис.12
Программа предварительной обработки заготовки:
%GENER(0)
‘ Описание геометрических объектов
P1=x0, y-16
P2=x0, y-15
P3=x90, y-15
P4= x90, y-16
P5=x20, y-10
P6=x90, y-10
P7=x10, y-15
P8=x-200, y-300
‘Программа предварительной обработки заготовки
%CUTTER(100)
%FROM(8,100)
m0=P1 – позиционирование в начальную точку
m1=P2 – снятие 2мм материала
m1=P3 – горизонтальное продвижение резца, снятие слоя в 2мм с заготовки
m0=P6 – позиционирование в точку 6
m1=P5 – снятие с заготовки слоя в 1мм с заготовки
m1=P7 – продвижение резца в точку 7 со снятием слоя материала
m0=P8 – возврат платформы 1
m99 – конец платформы и возвращение в исходную позицию.
6. Разработка программы основной обработки поверхности заготовки и обреза заготовки.
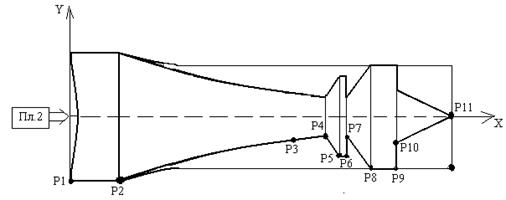
Рис.13
Программа основной обработки заготовки:
%GENER(0)
‘ Геометрическое описание объекта
P1=x0, y-15
P2=x10,y-15
P3=x52, y-5.5
P4=x59, y-5
P5=x64, y-9
P6=x66, y-9
P7=x66, y-5
P8=x73, y-14
P9=x80, y-14
P10=x80, y-7
P11=x90,y0
‘ Программа обработки поверхности фигуры
m0=P1 – позиционирование в начальную точку
m1=P2 – горизонтальное продвижение резца
m2=P2, c1P3 – от P2 к P3 по дуговой интерполяции
m1=P4 – продвижение резца со снятием слоя материала
m1=P5 – продвижение резца со снятием слоя материала
m1=P6 – горизонтальное продвижение резца и снятие слоя в 3мм с материала
m1=P7 – линейное движение в P7
m1=P8 – продвижение резца со снятием слоя материала
m1=P9 – линейное движение в P9
m1=P10 – линейное движение в P10
m1=P11 – продвижение резца со снятием слоя материала
m99 – конец платформы и возвращение в исходную позицию.
|
|
|
|
|
Дата добавления: 2015-08-31; Просмотров: 541; Нарушение авторских прав?; Мы поможем в написании вашей работы!