КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Електричні датчики: контактні, реостатні і потенціометричні датчики
|
|
|
|
Параметричні датчики призначені для перетворення неелектричного контрольованого або регульованого параметра в параметри електричного кола (R, L, C). Ці датчики отримують електричну енергію від допоміжного джерела енергії. Параметричні датчики поділяються на датчики активного опору (контактні, реостатні, потенціометричні, тензодатчики, терморезистори) і реактивного опору (індуктивні, ємнісні).
Генераторні датчики призначені для перетворення неелектричного контрольованого або регульованого параметра в ЕРС. Ці датчики не вимагають допоміжного джерела енергії, тому що самі є джерелами ЕРС. Генераторні датчики бувають термоелектричними, п'езоелектричними і тахометричними.
Датчики дискретних параметрів. До основних дискретних параметрів, перетворюваним датчиками в електричні сигнали, можна віднести стан об'єкту («увімкнений-вимкнений», «відкритий-закритий» і так далі) і кількість об'єктів. Часткою випадком параметра «стан» можна рахувати параметр «код» (операції, позиції і так далі), який, як і стан, визначається за деякою ознакою або набором ознак.
Як вже говорилося раніше, будь-який аналоговий (безперервний) параметр може дискретизувати, т. е. представлений набором значень, що відрізняються один від іншого на певну величину. Припустимо, що супорт оброблювального верстата може мати фіксовані значення кута повороту 0, 10, 20° і так далі. Кут повороту — величина аналогова, але якщо пронумерувати положення супорта, то ми матимемо справу з дискретними величинами — кодами позицій: 1, 2, 3 і так далі. Для отримання інформації про те, на який кут повернений супорт в цей момент, можна використовувати датчик кутового переміщення, але якщо на супорті є покажчик, по якому можна визначити код позиції супорта, то простіше використовувати датчик стану.
Різниця між датчиками стану і кількості в наступному. Датчик стану формує електричний сигнал, що однозначно відповідає одному з двох або декількох ознак стану об'єкту. Наприклад, двигун включений — на виході датчика є сигнал; двигун вимкнений — на виході датчика сигналу немає. І наявність, і відсутність сигналу містять інформацію про стан об'єкту.
Датчик кількості формує сигнал за наявності єдиної ознаки (наприклад, за наявності виробу на конвеєрі), після чого він повертається в початковий стан. При кожній черговій появі цієї ознаки формується новий сигнал, тобто саме в наявності цього сигналу полягає корисна інформація.
Сигнали з датчика кількості поступають на пристрій обробки дискретних сигналів — лічильник, який підраховує кількість сигналів, що поступили, а значить, кількість об’єктів, з якими пов'язаний датчик. Сигнали з датчика стану поступають на інший пристрій — регістр, по якому оператор або пристрій, що управляє, судять про стан об'єкту, з яким пов'язаний датчик.
Простий датчик дискретних параметрів — контактний (мал. 4.26). Його дискретний вхідний параметр — переміщення; дискретна вихідна величина — опір електричного ланцюга, який може бути або рівним нулю (контакти замкнуті), або нескінченно великим (контакти розімкнені). Дискретність вхідного параметра означає, що датчик сприймає тільки два значення переміщення штока, що рухається, відносно нього до початкового положення: або переміщення менше визначеною значення і контакт розімкнуть, або більше і контакт замкнутий. Такий датчик може використовуватися, наприклад, як кінці іон вимикач ланцюга управління елементом, що рухається, досягнутим крайнього положення, або для контролю гранично допусти мого розміру деталей на конвеєрі. Погрішність його може бути 1 дуже маленькою — близько 1 мкм.

Рисунок 5 - Контактний датчик переміщення
Широко використовуються для перетворення дискретних сигналів оптичні датчики. У підрозділах. «Датчики лінійних та кутових переміщень» була розглянута робота оптичного датчика як перетворювача аналогової величини (кутового переміщення), працюючого в дискретному режимі. Але він може використовуватися також і як датчик стану, і як датчик кількості.
У першому випадку об'єкт, стан якого контролюється, має бути забезпечений непрозорим «прапорцем», який при одному стані об'єкту перекриває потік світла від джерела до приймача випромінювання, а при іншому його стані пропускає цей потік. Відповідно в ланцюзі приймача випромінювання або немає струму, або він є. Роль прапорця може виконувати і сам контролюємий об'єкт.
У режимі датчика кількості джерело і приймач випромінювання розташовуються так, що кожен черговий об'єкт, що підлягає рахунку, перекриває оптичний канал і черговий сигнал з приймача випромінювання передається на лічильник.
Оптичні датчики зручні тим, що в них відсутній механічний контакт з контрольованим об'єктом. Вони широко використовуються не лише для виміру і контролю технологічних параметрів, але і для захисту обслуговуючого персоналу від потрапляння в небезпечну зону. У такій ситуації сигнал з датчика може не лише попередити персонал про небезпеку, але при необхідності автоматично відключити устаткування щоб уникнути травмування людей.
Комбінація дискретного контактного датчика з первинними механічними перетворювачами дозволяє створювати дискретні датчики аналогових параметрів, названі релейними. Контактний датчик розміщується поряд з механічним перетворенням, вихідний величиною якого являється переміщення (наприклад, пружинним перетворювачем сили, перетворювачем сильфону тиску або біметалічним — температури). Після досягнення заданого значення параметра елемент, що переміщається, замикає контакти датчика, формуючи вихідний сигнал. При зміні параметра у зворотному напрямі контакти знову розмикаються, причому зазвичай є невелика різниця в значеннях параметрів, що відповідають замиканню і розмиканню контактів (гістерезис).
Реостатні і потенціометричні датчики призначені для перетворення кутового або лінійного переміщення в електричний сигнал.
Основу цих датчиків складає реостат — плоска або згорнута в кільце пластина з ізоляційного матеріалу, на яку намотаний з рівномірним кроком ізоляційний дріт (рисунок 6). Матеріалом дроту може бути манганін, константан, ніхром або інший сплав з високим питомим електричним опором. На межі пластини ізоляція дроту зачищається, і по металу ковзає щітка у вигляді декількох пружної тяганини або пластини з навареним контактом. Для підвищення зносостійкості щітки виготовляють зі срібла, платини і їх сплавів, а тиск щітки на дріт не перевищує 0,1 Н.
Вхідний параметр плоского реостата — лінійне переміщення щітки, а кільцевого — її кутове переміщення. Вихідна величина реостатного датчика — активний опір ділянки дроту між щіткою і одним з кінців реостата. Хоча зміна опори при русі щітки від витка до витка відбувається ступінчасто, вихідну величину розглядають як аналогову, оскільки величина «сходинок» мала. Для зменшення «сходинок» і плавної зміни опору реостат намотують тонким дротом.

Рисунок 6 – Реостати: а – плоский; б – кільцевий
Реостатні датчики використовуються спільно з поплавцем для виміру рівня і об'єму рідини (рисунок 7, а), спільно з механічними пружними перетворювачами для виміру сили, тиску або моменту сили (рисунок 7, б), їх часто використовують спільно із виконавчими механізмами для отримання інформації про переміщення робочого органу.
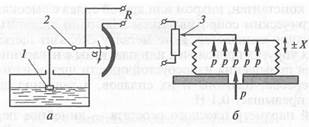
Рисунок 7 - Застосування реостатних датчиків: а — для виміру рівня рідини; б — для виміру тиску рідини або газу; 1 — поплавець; 2 — вісь обертання покажчика; 3 — движок реостата
До переваг реостатних і потенціометричних датчиків можна віднести: конструктивну простоту, малу масу і невеликі габарити, можливість живлення постійним і змінним струмом, простоту регулювання і високу стабільність.
Основними недоліками реостатних і потенціометричних датчиків є: наявність рухливого контакту, що знижує надійність роботи і термін роботи датчика, невисока чутливість, нелінійність характеристики при низькоомному навантаженні і наявність помилки від ступінчастості характеристики.
Значення реактивного опору реостатних і потенціометричних датчиків невелике і його можна не враховувати при роботі на частотах до декількох десятків кілогерц.
Датчики ємностей. У основі роботи датчиків ємностей лежить залежність ємності конденсатора З від його геометричних розмірів: площі обкладань S і відстані між ними d:

де  — абсолютна діелектрична проникність матеріалу, що знаходиться між обкладаннями.
— абсолютна діелектрична проникність матеріалу, що знаходиться між обкладаннями.
Вхідною величиною датчика ємності є лінійне або кутове (залежно від конструкції) переміщення однієї обкладинки відносно іншої або зміна діелектричної проникливості речовини, а вихідний — зміна електричної ємності.
Для виміру малих переміщень (до 1мм) використовують датчики зі зміною проміжку між обкладинками (рисунок 8, а). Спільно з мембранним первинним перетворювачем тиску такий датчик може використовуватися для перетворення тиску в електричний сигнал (рисунок 8, б).
Для виміру великих кутових переміщень використовується ємнісний датчик з площею перекриття обкладинок, що змінюється, оскільки його ємність лінійно залежить від площі, а отже, і від кута повороту рухливої пластини (рисунок 9, а). Такі датчики можуть застосовуватися, наприклад, для визначення кута повороту заслінки на трубопроводі або керма літака.
Відносно великі лінійні переміщення можна вимірювати за допомогою циліндричного датчика ємності (рисунок 9, б), у якого площа перекриття циліндричних обкладинок, розділених діелектриком, прямопропорційна подовжньому переміщенню однієї обкладинки відносно іншої.
Аналогічний датчик, виконаний у вигляді циліндра з центральним стрижнем, може використовуватися для виміру вологості матеріалу (наприклад, волокна або зерна), якщо випробуємий матеріал помістити всередину циліндра і використовувати його як діелектрик. Наявність вологи в матеріалі істотно змінює його діелектричну проникність і відповідно ємність такого конденсатора.

а — схема роботи; б — застосування для виміру тиску
Рисунок 2 – Датчик ємності малих переміщень

Рисунок 9 - Датчики ємностей зі змінною площею перекриття обкладинок (стрілками показаний напрям переміщення рухливого елемента):а — плоский; б — циліндричний
До переваг датчиків ємностей відносяться простота, малі габаритні розміри і висока чутливість (до 500 В/мм, якщо в якості вихідного сигналу розглядати напругу на конденсаторі). Їх недоліками є великий внутрішній опір (а отже, мала потужність вихідного сигналу), залежність від температури і необхідність живлення від джерела змінної напруги високої частоти.
Датчики ємності застосовуються для виміру лінійних і кутових переміщень, товщини стрічок і покриттів, вологості матеріалів.
Електромагнітні датчики. У основу роботи електромагнітних датчиків покладена залежність характеристик магнітного ланцюга від механічної дії на елементи, що утворюють цей ланцюг.
Електромагнітні датчики переміщення складаються з серцевини — магнітопроводу, виконаного із сталевих або пермалоєвих пластин, фериту або іншого феромагнітного матеріалу, і однієї або декількох обмоток. Магнітопровід має рухливий елемент, переміщення якого є вхідною величиною перетворювача. Розрізняють два типи таких датчиків: індукційні і трансформаторні.
Принцип роботи індукційних датчиків пояснює рисунок 10. Переміщення рухливого елементу — якоря — відносно нерухомій частині серцевини призводить до зміни ширини повітряного проміжку в магнітопроводі. Це, у свою чергу, викликає зміну індуктивності обмотки датчика, яке і являється вихідною величиною (тому така назва — «індукційний датчик переміщення»). Штриховими лініями на рисунку 10 показаний той, що змінюється при переміщенні якоря магнітний потік.
Функція перетворення — лінійна в області малих проміжків, тому такі датчики застосовуються для виміру переміщень від 0,01 мм до декількох міліметрів

Рисунок 10 – Схема роботи індуктивного датчика зі змінною шириною зазора.
Для виміру переміщень до 15...20 мм використовують індуктивні датчики з площею проміжку (рисунок 11), що змінюється.
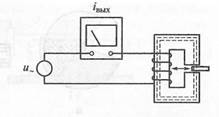
Рисунок 11 – Схема роботи індуктивного датчика зі змінною площиною зазора
Вхідним параметром також є переміщення рухливого елемента, магнітопровода, що вводиться в проміжок.
Для виміру переміщень до 100 мм застосовують індуктивні датчики соленоїдного типу (рисунок 12). У них індуктивність обмотки прямопропорційна довжині х введеної в соленоїд частини рухливого осердя.
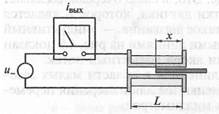
Рисунок 12 - Схема роботи індуктивного датчика соленоїдного типу
Індуктивні датчики живляться від джерела змінної напруги. Оскільки їх індуктивність відмінна від нуля при будь-кому, у тому числі початковому положенні якоря, вони створюють великий вихідний сигнал навіть при нульовому значенні вхідного параметра.
Цей недолік можна істотно зменшити застосуванням диференціальних датчиків (рисунок 13), в яких використовуються два нерухомі осердя з обмотками, ввімкненими зустрічно. Якір розташований між осердями на однаковій довжині від них, тому в початковому стані магнітні потоки в осердях однакові, отже, однакові індуктивності обмоток і напруги на них, а різниця цієї напруги дорівнює нулю.
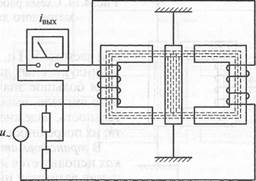
Рисунок 13 - Схема роботи диференціального індуктивного датчика
Коли якір зміщується у бік одного з осердь, магнітний потік в цьому осерді збільшується, а в іншому - зменшується. Індуктивності обмоток і напруги на них стають різними, що призводить до появи вихідного сигналу.
Дуже великі переміщення (наприклад, переміщення супорта металорізального верстата) можна виміряти за допомогою індуктивного датчика із зубчастим осердям (рис. 14). При русі датчика уздовж зубчастої лінійки, закріпленої на станині верстата, індуктивність його обмотки періодично змінюється. Коли торці осердя датчика знаходяться над зубцями лінійки, індуктивність обмотки максимальна, а при зміщенні осердя в область між зубцями індуктивність зменшується. Відповідно струм в ланцюзі міняється від мінімального до максимального, утворюючи перепад (імпульс). Один імпульс відповідає переміщенню датчика на один крок зубів.
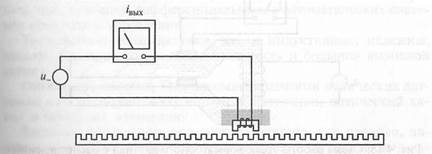
Рисунок 14 – Схема роботи індуктивного датчика із зубчастим осердям
Вихідна величина такого датчика — кількість перепадів струму (імпульсів) в ланцюзі обмотки; точність виміру залежить від кроку зубів.
Усі індуктивні датчики — параметричні, живляться від джерел змінної напруги, як правило, промислової частоти 50 Гц. Перевагами індуктивних датчиків є велике значення вихідного сигналу, висока чутливість, надійність і простота; їх похибка — близько 1 %.
У трансформаторних датчиках використовується явище зміни взаємної індуктивності обмоток при переміщенні рухливого елементу магнітопроводу (рис. 15) відносно його нерухомої частини. Одна з обмоток (первинна) живиться від джерела змінної напруги, з вторинної обмотки знімається вихідний сигнал.
На вигляд датчик схожий на звичайний трансформатор, використовуваний для отримання змінної напруги потрібної величини. Проте наявність повітряного проміжку в магнітопроводі призводить до того, що магнітний потік в нім, як і в індуктивному датчику, залежить від величини проміжку. Чим менше проміжок, тим більше магнітний потік і тим більша електрорушійна сила виникає у вторинній обмотці, і навпаки. Таким чином, вхідна величина трансформаторного датчика є переміщення рухливого елементу магнітопроводу, а вихідний — напруга на виході вторинної обмотки. Область вимірюваних переміщень — від сотих доль міліметра до декількох міліметрів.

Рисунок 15 - Схема роботи трансформаторного датчика
Для виміру переміщень до 100 мм і більше використовуються трансформаторні датчики з розподіленими магнітними параметрами (рисунок 16). Вторинна обмотка у них рухлива і може ковзати по магнітопроводу, магнітний потік в якому показаний штриховими лініями. У просторі навколо магнітопроводу, як завжди, існує магнітне поле, яке просочує рухливу обмотку. У лівому положенні обмотки магнітний потік, що проходить через неї, максимальний, як і виникаюча в ній ЕРС (вихідний сигнал датчика). У міру зміщення вправо магнітний потік, що проходить крізь обмотку, зменшується і в крайньому правому положенні він мінімальний, відповідно мінімальний і вихідний сигнал.

Рисунок 16 – Схема роботи трансформаторного датчика з разподіленними магнітними параметрами
Трансформаторні датчики по конструкції і характеристикам дуже схожі на індуктивні. Вони теж можуть бути дифференціальними (рисунок 17), що також покращує їх характеристики. Нова відмінність від індуктивних датчиків трансформаторні датчики можна віднести до датчиків генераторного типу. Хоча вони і вимагають для своєї роботи наявності джерела напруги, але I ш малий безпосередньо на виході датчика активний — електрорушійна сила, яка може бути легко виміряна. Це призвело до широкого поширення трансформаторних датчиків переміщення, особливо диференціальних, в автоматичних системах контролю і управління.

Рисунок 17 – Схема дифференціального трансформаторного датчика
Трансформаторні датчики, як і індуктивні, надійні, прості (мають високу чутливість і великий вихідний сигнал).
|
|
|
|
|
Дата добавления: 2017-01-14; Просмотров: 3269; Нарушение авторских прав?; Мы поможем в написании вашей работы!