КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Жестко соединенные и образующие одно звено
|
|
|
|
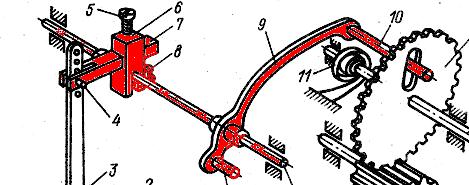
Фрагмент схемы механизма (красным цветом выделены детали
Жесткая и подвижная механические системы
В технике применяют также механизмы, в которых звенья могут быть твердыми, жидкими и газообразными. Наибольшее применение получили механизмы, состоящие из твердых тел, которые в первом приближении считают абсолютно жесткими (недеформируемыми).
Ведущими звеньями называются звенья механизма, к которым приложены движущая сила или момент силы и закон движения которых считается известным.
Звенья, совершающие требуемые движения и, со стороны которых на механизм действуют силы полезного сопротивления, называют ведомыми.
Стойка - звено, которое при исследовании механизма принимается за неподвижное, и относительно которого движутся остальные звенья.
Кинематическая пара (КП) - подвижное соединение двух звеньев, допускающее их определенное относительное движение.
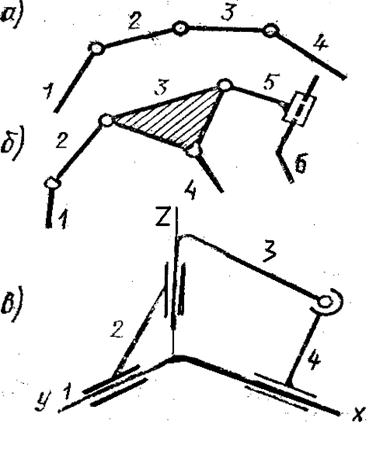
Кинематическая цепь (КЦ) - система звеньев, образующих между собой кинематические пары. КЦ могут быть:
· Открытыми (есть звенья, входящие только в одну кинематическую пару), рис (а)
· Замкнутыми (каждое звено входит не менее, чем в две КП). рис (в, г)
· Плоскими (все звенья перемещаются в одной или в параллельных плоскостях), рис (а, б)
· Пространственными (точки разных звеньев описывают неплоские траектории или перемещаются в непараллельных плоскостях). рис (в, д)
 |
(д) - схема манипулятора
$ Не всякая КЦ является механизмом. В механизмах обязательно должны быть одно или несколько неподвижных звеньев (стойки), все остальные (ведомые) звенья совершают определенное движение.

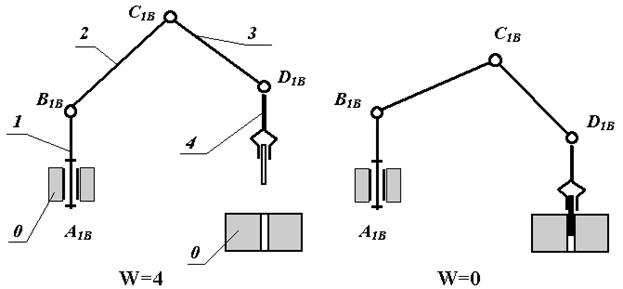
Число степенейсвободы или подвижность механизма - число независимых обобщенных координат однозначно определяющее положение всех его звеньев на плоскости или в пространстве.
0.2. Кинематические пары
Кинематическая пара (КП) - подвижное соединение двух звеньев, допускающее их определенное относительное движение.
В местах соединения пары звеньев им придают определенные геометрические формы, чтобы обеспечить требуемый вид относительного движения.
$ Контактирующими элементами кинематической пары называют совокупностьточек, линий и поверхностей, по которым звенья непрерывно касаются, и характер соприкосновения которых определяет вид относительного движения соединяемых звеньев.,
$ По виду контактирующих элементов различают высшие и низшие кинематические пары.
В низших КП - контактирующие элементы — поверхности.
В высших КП - контактирующие элементы — точка или линия, но не поверхности.
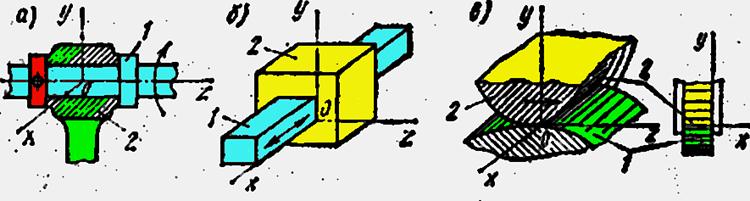
Примеры низших КП:
а) пространственный шарнир - сферический шарнир (контактирующие элементы (КЭ): сфера–сферическое гнездо);
б) плоский шарнир - цилиндрический шарнир (КЭ: – цилиндрические вал – втулка);
в) КП поступательного перемещения (КЭ: цилиндрические вал – втулка - направляющая шпонка);
г) Винтовая КП (КЭ: винт – гайка).
(Контактирование во всех КП происходит по поверхностям!!!)
Примеры высших КП:
 Механизм кулачковый- звенья 1 и 2 образуют высшую КП. (КЭ: Выпуклая поверхность дискового кулачка 1 и цилиндрическая поверхность ролика 2. Контакт – линейчатый).
Механизм кулачковый- звенья 1 и 2 образуют высшую КП. (КЭ: Выпуклая поверхность дискового кулачка 1 и цилиндрическая поверхность ролика 2. Контакт – линейчатый).
Звенья: 0) стойка, 1)кулачок, 2) ролик, 3) коромысло.
 Кулисный механизм - высшая КП в точке контакта рычагов. КЭ: плоскость - сфера. Контакт- точечный.
Кулисный механизм - высшая КП в точке контакта рычагов. КЭ: плоскость - сфера. Контакт- точечный.
В этом механизме м/б применены для контактирующих элементов плоскость и цилиндр!!!
Зубчатый реечный механизм. Высшая КП в зацеплении зубчатых колеса (1) и рейки (4).
КЭ: Эвольвентная поверхность зуба колеса – плоскость на зубе рейки.
Виды замыкания в КП.
Во время движения механизма звенья в кинематических парах не должны разъединяться, т. е. пары должны быть замкнутыми.
Существует геометрическое и силовое замыкание пар..
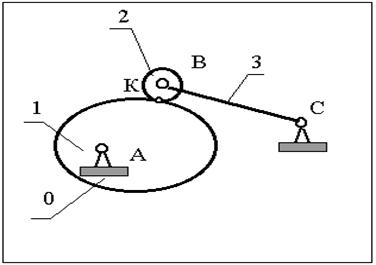
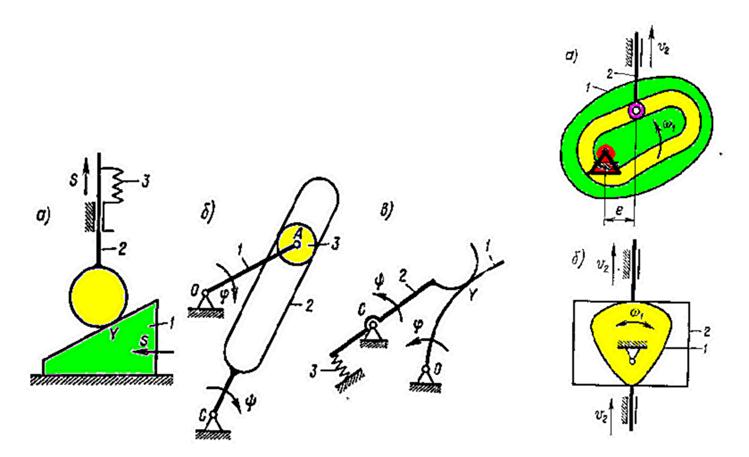
Геометрическое замыкание обеспечивается формой или конструкцией соприкасающихся звеньев (см. рис. 2а).
Для Силовое замыкания пар необходимо наличие дополнительно действующей на звенья внешней силы, которая создается силой упругости пружины, силой тяжести и т. п.
Высшие КП
Низшие КП
Обратимость КП
Низшие пары обладают свойством обратимости, т. е. вид траекторий точек звеньев при их относительном движении одинаков (траектории точек А и В одинаковые окружности см рис. а).
Высшие пары этим свойством не обладают даже при чистом качении. Так, траектория точки А цилиндра 1 (см. рис. б) при его качении по звену 2— циклоида, а при качении звена 2 по цилиндру 1 — эвольвента. Уравнения и свойства этих кривых различны.
Сравним эти свойства для других примеров на схемах выше.
Свойства ВЫСШИХ И НИЗШИХ КП
при проектировании
| свойства | Низшие КП | Высшие КП |
| Контакт | по поверхности | по линии и/или в точке |
| Трение | Чистое скольжение | качение, скольжение, качение + скольжение. |
| Нагрузочная способность | Высокая | Низкая (sк =F/Sконт.) |
| Сложность изготовления КЭ. | Высокая точность размеров, формы, шероховатость | Невысокая – КЭ элементарные тела и поверхности (Плоскость,Сфера, Цилиндр - м/б точно обработаны) |
| Обратимость КП | Обратимы | Необратимы. |
| Вид замыкания | Геометрический, редко силовой | Силовой |
| Область применения | Машины, механизмы нагруженные | Маломощные механизмы, приборы. |

Различают кинематический, и машиностроительный методы проектирования кинематических пар.
При машиностроительном методе пары — низшие, при кинематическом— высшие.
К достоинствам кинематического метода проектирования следует отнести: а) точность фиксации; б) статическую определимость кинематических пар (число неизвестных составляющих реакций равно числу уравнений равновесия). При статической определимости направляющих движения, спроектированных по кинематическому методу, уменьшается неплавность перемещений при малой скорости движения.
 |
Сферические шарниры, построенные по принципам низшей (а) и высшей (б) КП.
а) КЭ: сфера–сферическое гнездо;
б) КЭ: сфера- две шайбы с коническими отверстиями. Контакт – линейчатый.)
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 850; Нарушение авторских прав?; Мы поможем в написании вашей работы!