КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основные виды рычажных механизмов
|
|
|
|
1. Кривошипно-ползунный механизм.
а) центральный (рис.1);
б) внеосный (дезоксиальный) (рис.2);
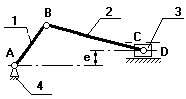
е - эксцентриситет
Рис. 2
1-кривошип, т.к. звено совершает полный оборот вокруг своей оси;
2-шатун, не связан со стойкой, совершает плоское движение;
3-ползун (поршень), совершает поступательное движение;
4-стойка.
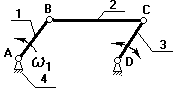 |
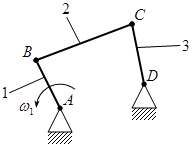
2. Четырехшарнирный механизм.
Звенья 1,3 могут быть кривошипами.
Если зв.1,3 – кривошипы, то механизм двукривошипный.
Если зв.1 – кривошип (совершает полный оборот), а зв.3 – коромысло (совершает неполный оборот), то механизм кривошипно-коромысловый.
Если зв.1,3 – коромысла, то механизм двукоромысловый.
3. Кулисный механизм.
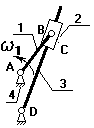 |
1 - кривошип;
2 - камень кулисы (втулка) вместе с зв.1 совершает полный оборот вокруг А (w1 и w2 одно и тоже), а также движется вдоль зв.3, приводя его во вращение;
3 - коромысло (кулиса).
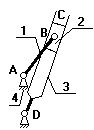
4.Гидроцилиндр
(в кинематическом отношении подобен кулисному механизму).
 |
В процессе проектирования конструктор решает две задачи:
· анализа (исследует готовый механизм);
· синтеза (проектируется новый механизм по требуемым параметрам);
Структурный анализ механизма.
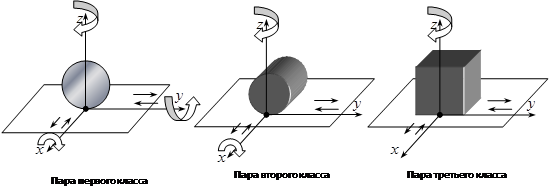
Понятия о кинематических парах и их классификация.
Два звена неподвижно связанных между собой образуют кинематическую пару. Все кинематические пары подвергаются двум независимым классификациям:
1. Пары бывают высшие или низшие:
a. Высшие пары – пары, в которых контакт осуществляется по линии.
b. Низшие пары – пары, в которых контакт осуществляется по поверхности.
2. Все пары делятся на пять классов, в зависимости от числа налагаемых связей на подвижность каждого из звеньев. Число степеней подвижности обозначается за  . Число налагаемых связей обозначается за
. Число налагаемых связей обозначается за  . При этом число степеней подвижности можно определить по формуле:
. При этом число степеней подвижности можно определить по формуле:  .
.
a. Пара первого класса:  ;
;  .
.
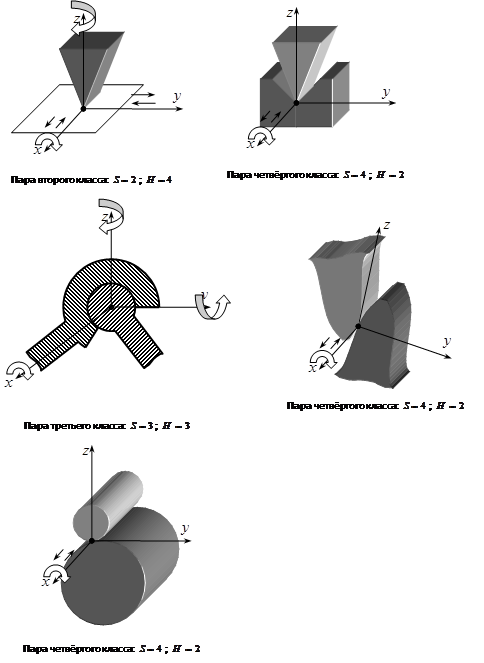
b. Пара второго класса:  ;
;  .
.
c. Пара третьего класса:  ;
;  .
.
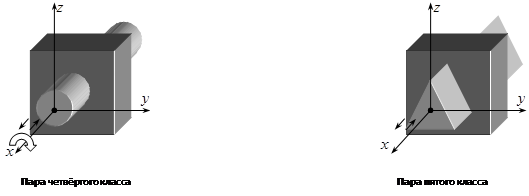
d. Пара четвёртого класса:  ;
;  .
.
e. Пара пятого класса:  ;
;  .
.
Примеры классификации пар:
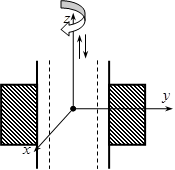
Рассмотрим кинематическую пару «винт-гайка». Число степеней подвижности этой пары равно 1, а число налагаемых связей равно 5. Это пара будет являться парой пятого класса, свободным можно выбрать только один вид движения для винта или гайки, а второе движение будет сопутствующим.
 Кинематическая цепь – звенья, связанные между собой кинематическими парами различных классов.
Кинематическая цепь – звенья, связанные между собой кинематическими парами различных классов.
Кинематические цепи бывают пространственными и плоскими.
Пространственные кинематические цепи – цепи, звенья которых двигаются в различных плоскостях.
Плоские кинематические цепи – цепи, звенья которых двигаются в одной или параллельных плоскостях.
Понятия о степени подвижности кинематических цепей и механизмов.
Число звеньев свободно парящих в пространстве обозначим за  . Для звеньев степень подвижности можно определить по формуле:
. Для звеньев степень подвижности можно определить по формуле:  . Образуем из этих звеньев кинематическую цепь, соединив между собой звенья парами различных классов. Число пар различных классов обозначается за
. Образуем из этих звеньев кинематическую цепь, соединив между собой звенья парами различных классов. Число пар различных классов обозначается за  , где
, где  - класс, то есть:
- класс, то есть:  - число пар первого класса, у которого
- число пар первого класса, у которого  , а
, а  ;
;  - число пар второго класса, у которого
- число пар второго класса, у которого  , а
, а  ;
;  - число пар третьего класса, у которого
- число пар третьего класса, у которого  , а
, а  ;
;  - число пар четвёртого класса, у которого
- число пар четвёртого класса, у которого  , а
, а  ;
;  - число пар пятого класса, у которого
- число пар пятого класса, у которого  , а
, а  . Степень подвижности образованной кинематической цепи можно определить по формуле:
. Степень подвижности образованной кинематической цепи можно определить по формуле: 
 .
.
Образуем из кинематической цепи механизм. Одним из основных признаков механизма является наличие стойки (корпуса, основания), около которого движутся остальные звенья под действием ведущего звена (звеньев).
Степень подвижности механизма принято обозначать за  . Одно из звеньев кинематической цепи превратим в стойку, то есть отнимем у него все шесть степеней подвижности, тогда:
. Одно из звеньев кинематической цепи превратим в стойку, то есть отнимем у него все шесть степеней подвижности, тогда:  - формула Сомова-Малышева.
- формула Сомова-Малышева.
В плоской системе максимальное число степеней подвижности  равно двум. Поэтому степень подвижности плоской кинетической цепи можно определить по следующей формуле:
равно двум. Поэтому степень подвижности плоской кинетической цепи можно определить по следующей формуле:  . Степень подвижности плоского механизма определяется по формуле Чебышева:
. Степень подвижности плоского механизма определяется по формуле Чебышева:  , где
, где  - число подвижных звеньев. Используя определение высших и низших кинематических пар формулу Чебышева можно записать следующим образом:
- число подвижных звеньев. Используя определение высших и низших кинематических пар формулу Чебышева можно записать следующим образом:  .
.
Пример определения степени подвижности:

 ;
;
 ;
;
 ;
;
 .
.
Классификация механизмов
Количество типов и видов механизмов исчисляется тысячами, поэтому классификация их необходима для выбора того или иного механизма из большого ряда существующих, а также для проведения синтеза механизма.
Универсальной классификации нет, но наиболее распространены 3 вида классификации:
1) функциональная [2]. По принципу выполнения технологического процесса механизмы делятся на механизмы: приведения в движение режущего инструмента; питания, загрузки, съёма детали; транспор-тирования и т.д.;
2) структурно-конструктивная [3]. Предусматривает разделение механизмов как по конструктивным особенностям, так и по структурным принципам. К этому виду относят механизмы: кривошипно-ползунный; кулисный; рычажно-зубчатый; кулачково-рычажный и т.д.;
3) структурная. Проста, рациональна, тесно связана с образованием механизма, его строением, методами кинематического и силового анализа, была предложена Л.В. Ассуром в 1916 году и основана на принципе построения механизма путем наслоения (присоединения) кинематических цепей (в виде структурных групп) к начальному механизму. Согласно этой классификации, любой механизм можно получить из более простого присоединением к последнему кинематических цепей с числом степеней свободы W = 0, получивших название структурных групп, или групп Ассура.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 5350; Нарушение авторских прав?; Мы поможем в написании вашей работы!