КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Общие положения. Лишние степени свободы используются для упрощения кинематической схемы механизма, сокращения потерь при передаче мощности
|
|
|
|
ЗУБЧАТЫЕ ПЕРЕДАЧИ
Лишние степени свободы используются для упрощения кинематической схемы механизма, сокращения потерь при передаче мощности, повышения механического коэффициента полезного действия механизма. Например, между кулачком 1 и толкателем 2 кулачкового механизма устанавливается ролик 3 для устранения трения.
Лишние степени свободы
Кулачковый механизм
с роликовым толкателем
В этом случае степень подвижности механизма, вычисленная по формуле П.Л. Чебышева, будет равна 2:
W = 3n – 2P5 – P4 = 3×3 – 2×3 – 1 = 2.
Здесь явно присутствует лишняя степень свободы, а именно вращение ролика под действием силы трения качения. Её следует учитывать при проведении структурного анализа данного механизма. Ведь очевидно, что данный механизм может функционировать и без ролика 3. Но при этом трение качения будет заменено трением скольжения между кулачком и толкателем (высшей кинематической парой), что увеличивает потери мощности в механизме на преодоление сил трения.
Тогда степень свободы такого механизма вычисляется по формуле
W = 3n – 2P5-P4-q,
где q – количество лишних степеней свободы.
Зубчатые передачи предназначены для передачи вращательного движения от одного вала к другому, а также для изменения величины и направления угловой скорости валов. Пару зубчатых колес, находящихся в зацеплении друг с другом, называют ступенью.
Все зубчатые одноступенчатые передачи можно разделить на цилиндрические, конические и гиперболоидные.
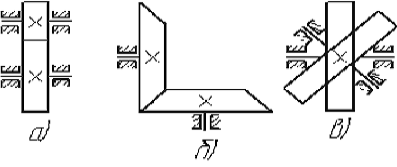
Кинематические схемы зубчатых передач: а – цилиндрическая;
б – коническая; в – гиперболоидная
По характеру расположения осей вращения передачи бывают с параллельными, пересекающимися и перекрещивающимися осями.
В цилиндрических передачах оси валов параллельны. По характеру расположения зубьев на зацепляющихся колесах они разделяются на прямозубые, косозубые и шевронные.
В конических передачах оси валов пересекаются. Наиболее распространены конические передачи с прямым углом между осями валов.
В гиперболоидных передачах оси валов перекрещиваются. В свою очередь эти передачи подразделяются на гипоидные, винтовые и червячные. Последние являются частным случаем винтовых передач и состоят из червяка и червячного колеса.

Прямозубые передачи
а – с наружным зацеплением
б – с внутренним зацеплением
в – реечная передача
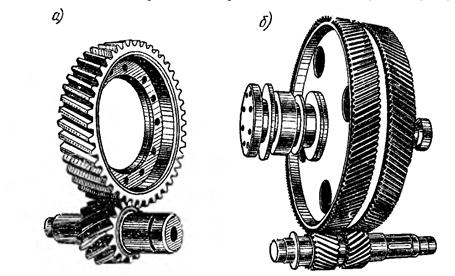
а – косозубая передача
б – шевронная передача
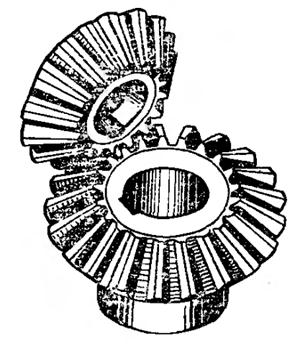
Коническая передача
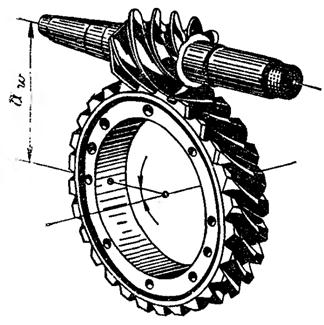
Червячная передача
Преимуществами зубчатых передач перед другими (фрикционными, ременными, цепными) являются постоянство передаточного отношения, высокий механический кпд, долговечность и компактность.
Недостатком является то, что наличие высшей кинематической пары в месте контакта зубьев приводит к большим контактным напряжениям, тем самым при их эксплуатации приходится ограничивать величину передаваемых усилий, упрочнять поверхности зубьев в зоне их контакта, применять систему смазки колес.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 563; Нарушение авторских прав?; Мы поможем в написании вашей работы!