КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Тема 1 Проектувальний розрахунок грейфера
|
|
|
|
НАВЧАЛЬНО – МЕТОДИЧНІ МАТЕРІАЛИ
Конспект лекцій
з дисципліни
“Спеціальні підйомно-транспортні машини”
| Рекомендовано до використання в учбовому процесі засіданням кафедри ПТМ Протокол №1 від 15.08.12 |
Краматорськ 2012
Основна література
1 Петухов П.З., Ксюшин Г.П., Серлин Л.Г. Специальные краны. – М.: Машиностроение, 1985. – 248 с.
2 Методичні вказівки до практичних занять з дисципліни “Конструювання спеціальних підйомно – транспортних машин”. Уклад.: В.І. Онищенко. - Краматорськ: ДДМА. 2000. – 40 с.
3 Методичні вказівки до лабораторних робіт з дисципліни “Cпеціальні підйомно – транспортні машини” Уклад.:І.П. Катасонов, М.Ю. Дорохов. – Краматорськ: ДДМА, 2003. – 68 с.
4 Методичні вказівки до курсового проекту з дисципліни “Спеціальні крани”
Уклад.: В.І. Онищенко. – Краматорськ: ДДМА, 2000. – 12 с.
Додаткова література
1 Абрамович И.И., Котельникова Г.А. Козловые краны общего назначения. –М.: Машиностроение, 1983. – 282 с.
2 Беглов Б.В., КохП.И., Онищенко В.И. и др. Мостовые перегружатели. - М.: Машиностроение, 1974. – 224 с.
3 Богинский К.С., Зотов Ф.С., Николаевский Г.М. Мостовые и металлургические краны. - М.: Машиностроение, 1970. – 300 с.
4 Вайсон А.А. Подъемно – транспортные машины. - М.: Машиностроение, 1985. – 248 с.
5 Вайсон А.А., Андреев А.В. Крановые грузозахватные устройства. - М.: Машиностроение, 1985. – 248 с.
6 Гохберг м.М. Металлические конструкции подъемно – транспортных машин. – Л.: Машиностроение, 1976. – 454 с.
7 Дукельский А.И. Портовые грузоподъмные машины. – М.: Транспорт, 1970. – 439 с.
8 Епифанов С.П., Поляков В.И. Пневмоеолесные м гусеничные краны. – М.: Высшая школа, 1985. – 312 с.
9 Казак С.А. и др. Расчеты металлургических кранов. – М.: Машиностроение, 1973. – 264 с.
10 Кох П.И., Нещеретный П.М., Чекулаев В.А. Козловые краны для гидроэлектростанций. - М.: Машиностроение, 1972. – 168 с.
11 Кружков В.А. Металлургические подъемно – транспортные машины. – М.: Металлургия, 1989. – 464 с.
12 Курсовое проектирование грузоподъемных машин. Под ред. С.А. Казака. – М.: Высшая школа, 1989. – 319 с.
13 Невзоров Л.А., Зарецкий А.А., Волин Л.М. и др. Башенные краны. – М.: Высшая школа, 1979. – 292 с.
14 Никитин К.Д., Марьясов В.Г., Смолин А.Ю. Специальные металлургические краны. – Красноярск: Изд-во Красноярского ун-та, 1989. – 232 с.
15 правила устройства и безопасной эксплуатации грузоподъемных кранов. – К.: Изд-во “Харків”, 1994. – 272 с.
16 Справочник по кранам. В 2-х т. Под ред. М.М. Гохберга. – Л.: Машиностроение, 1988.- Т.1 – 536 с., т.2 – 559 с.
17 Таубер Б.А. Грейферные механизмы. - М.: Машиностроение, 1980. – 456 с.
18 Прошин А.С. Монтажные краны электростанций. - М.: Машиностроение, 1973. – 246 с.
Метою цього розрахунку є визначення основних параметрів грейфера, необхідних для його виготовлення: маси, номінальної ємності, кратності грейферного поліспаста, ширини, довжини і висоти щелепи, товщини крайки щелеп, що ріже.
1.1 Визначення маси і ємності грейфера
На практиці зустрічаються 2 случаючи.
Випадок 1. підібрати грейфер при відомій вантажопідйомності крана і відомої насипної щільності матеріалу.
Повинне бути виконане умова
mГР + m ≤ Q
mГР + m = до1 Q, до1=0,9...1…1,0
mГР = кГР Q,
де Q – номінальна вантажопідйомність крана (включаючи масу матеріалу і грейфера);
кГР – коефіцієнт, що приймають у залежності від властивостей матеріалу, що зачерпується, і деяких додаткових умов
; кгр=0,…0,6;менші значення для легкозачерпываемых матеріалів (зерно, пісок), великі значення для труднозачерпываемых (руда, гравій)
кГР Q + m = до1 Q;
m = (до1–кГР)Q;
m = ρMV;
де ρM – насипна щільність матеріалу, т/м3;
V – ємність
 V=VADC+VABC,
V=VADC+VABC,
де VADC – обсяг наливної призми;
VABC – обсяг призми утвореної кутами укосу навалочного вантажу
Випадок 2. підібрати грейфер при відомій необхідній продуктивності, перевантажувального процесу П, т/ч і відомої насипної щільності матеріалу ρM.
Визначаємо масу матеріалу, що перевантажується краном в оном циклі

де n – число циклів у годину, виконуваних краном при відомих швидкісних характеристиках механізмів і варіантах робіт;
Грейфер підбирається по каталогах у залежності від його маси, ємності і застосовності для різних видів матеріалів.
1.2 Визначення геометричних параметрів грейфера (по емпіричних залежностях)



 – товщина ножа δ повинна встановлюватися з умови забезпечення достатньої твердості днища,
– товщина ножа δ повинна встановлюватися з умови забезпечення достатньої твердості днища,
де доδ – коефіцієнт, що залежить від матеріалу, доδ=0,012 – для дрібних сипучих матеріалів;, доδ=0,014 – для крупнокусковых матеріалів;
ρM – насипна щільність матеріалу, т/м3;
V – ємність грейфера, м3
1.3 Кратність грейферного поліспаста
Найчастіше застосовуються наступні кратності
n=3...4…4 при ρM =0,8...1…1,2т/м3
n=4...5…5 при ρM =1,2...2…2,2т/м3
n=5...6…6 при ρM =2,2...3…3,5т/м3
Перевірочний розрахунок грейфера
Після проектувального розрахунку виготовляється експериментальний грейфер, що випробується.
При незадовільній здатності, що зачерпує, (грейфер погано зачерпує чи вантаж перевантажується) виробляється коректування його конструкції на базі перевірочного розрахунку.
Задачею перевірочного розрахунку є встановлення залежності між параметрами грейфера і силою впровадження щелеп у матеріал, що прикладають до ножів щелеп і направляють по дотичній до кривої зачерпывания.
При зачерпывании переборюються наступні сили опору:
- сили тертя між матеріалом і бічними стінками щелепи з зовнішньої і внутрішньої їхньої сторони;
- сили тертя між матеріалом і днищем щелеп із внутрішньої сторони, а для зовнішньої сторони тільки для добре сипучих матеріалів;
- опору від підйому матеріалу при здавлюванні щелепами.
Точне визначення усіх видів опорів важко, тому в практиці проектування ефективність роботи грейфера оцінюють по величині коефіцієнта заповнення грейфера і зв'язані з ним зусилля впровадження F.
Розглянемо графоаналітичний розрахунок грейфера.
На малюнку показаний двухканатный грейфер у проміжному положенні при зачерпывании, обумовленому відстанню 0≤Х≤0,5L крайки, що ріже, від початкового положення повного розкриття.
Малюнок – Схема розрахунку грейфера
На грейфер діють вага верхньої траверси GA, з урахуванням верхніх блоків поліспаста і ваги частини ланок і нижньої траверси GB з урахуванням нижніх блоків поліспастів щелеп GС з частиною ваги ланок і поточного значення ваги зачерпнутого матеріалу GМХ (вагу GС і GМХ вважаємо рівномірно діючим на щелепі). реакція матеріалу (зусилля впровадження) F спрямована по дотичній до кривої зачерпывания, FV і FH – вертикальна і горизонтальна складові. ZA і ZB – зусилля притягання між собою верхньої і нижньої траверс за допомогою поліспаста кратністю U. Т – зусилля в тязі.
 Знайдемо ZA і ZB
Знайдемо ZA і ZB
ZA і ZB – реактивні зусилля
 (1) Рівняння рівноваги
(1) Рівняння рівноваги
Застосуємо правило поліспаста
 , (2)
, (2)
де ηП – КПД поліспаста


Визначимо графічним шляхом зусилля в чи тязі ланці грейфера

Зусилля Т визначається для декількох положень грейфера починаючи від цілком відритого до цілком закритого.
Переносимо силу Т по лінії дії в крапку С и розглядаємо рівновагу щелепи ΣМb=0
Т·a+0,5GC·b+0,5GMX·c–FH·d–FV·e=0 (3)
Розкладемо силу F на вертикальну і горизонтальну складові
Розглянемо рівновагу всього грейфера (ΣYi=0).
GA+GB+GC+GMX–S3–2FV=0, (4)
де GA+GB+GC=GГР;
FV=0,5(GГР-S3+GMX)=var
З (4) визначаємо FV і, підставляючи в (3), знаходимо FH=var. (FV=var; FH=var – унаслідок зміни конструкції грейфера при зачерпывании, тобто зміни пліч, зміни GMX і S3 при зачерпывании).
Будуємо графік зміни F; FV; FH у процесі зачерпывания.
Після проведення перевірочного розрахунку виробляється розрахунок коефіцієнта заповнення грейфера φ
 1,0,
1,0,
де VФАКТ – фактична ємність матеріалу, що зачерпується;
VНОМ – номінальна ємність грейфера
ρ – насипна щільність матеріалу, т/м3;
 – фактична маса матеріалу в грейфері;
– фактична маса матеріалу в грейфері;

Якщо [?]=0,9...1,0 – грейфер добре спроектований і сила впровадження щелеп дорівнює рівнодіючої від опору впровадженню.
Якщо?<[?]?=0,6, то грейфер має недостатню здатність і недостатню силу впровадження F і в цьому випадку виробляється коректування конструкції грейфера, що виконується на основі перевірочного розрахунку, тобто коштує задача збільшити силу зачерпывания, це можна досягти збільшенням мас окремих елементів грейфера, зміною їхніх розмірів, зменшенням кратності грейферного поліспаста.
Можливо також переповнення грейфера, коли він надмірно занурюється в матеріал, у цьому випадку необхідно зменшити масу грейфера.
Реконструкція грейфера виробляється шляхом переробки експериментального грейфера, але не шляхом виготовлення нового грейфера, після чого грейфер випробують знову і визначається коефіцієнт заповнення?.
На закінчення експериментальний грейфер подається на іспит для серійного виготовлення.
Таблиця 1 – Технічна характеристика виконуваних конструкцій грейферів
| mГР, т | V, м3 | ρМ, т/м3 | Q, т | UП |
| 6,3 | 4,75 | 2,7 (руда) | ||
| 6,55 | 8,0 | 1,2 (вугілля) |
Магнітні крани
Магнітні крани призначені для підйому і транспортування феромагнітних матеріалів. Ці крани постачені вантажними електромагнітами, підвішеними на крюковой чи підвісці траверсі (на гнучкому чи твердому підвісі).
Вантажопідйомність магнітних кранів складає від 5 до 40, швидкість підйому 14-20 м/хв, швидкість пересування крана 70-120 м/хв, швидкість пересування візка 40-70 м/хв.
Металоконструкції цих кранів двухбалочные коробчатой конструкції, рідше з допоміжними фермами і мають високий опір утоми.
Магнітний кран складається з моста з механізмом пересування, однієї чи двох візків з механізмом підйому і пересування, піднімальних магнітів і кабіни.
Механізми пересування цих кранів і їхніх візків не мають відмінний від механізмів кранів загального призначення.
Вантажопідйомні електромагніти
Застосовуються для перевантаження феромагнітних матеріалів. Вони можуть установлюватися на наступних спеціальних кранах: мульдомагнитных, магнитогрейферных, кліщових, колодцевых, стриперных, пратцен-кранах, портальних, плавучих, залізничних, копрових.
Магніти поділяються на 2 групи.
1 Тип М – круглий електромагніт, застосовується в основному для перевантаження скрапу і бойных куль. Діаметр серійних круглих магнітів – не більш 1600 мм.
2 Тип ПМ – прямокутний магніт (730х1200 мм), застосовується для перевантаження листового і профільного прокату.
1 – корпус 2 – зовнішній (кільцевий) полосный башмак 3 – внутрішній (центральний) полосный башмак 4 – котушка постійного струму 5 – магнітні силові лінії 6 – вантаж, що притягається, 7 – немагнітна шайба
Круглий вантажопідйомний електромагніт складається з литого герметичного корпуса 1, що виготовляється зі сталі з високою магнітною проникністю, котушки 4, кожна секція якої виконана з мідної стрічки. Витки секцій ізольовані тонким азбестовим папером, просоченої ізоляційним теплостійким лаком, чи стекловолокнистой стрічкою.
Смуги 3 утримують котушку знизу через немагнітну шайбу з высокомарганцовистой стали. З корпусом смуги з'єднують чи болтами зварюванням.
Магніти працюють на постійному струмі напругою 220В. якщо харчування приводів механізмів крана здійснюється перемінним струмом, то для харчування електромагнітів використовують статичні чи обертові перетворювачі. Харчування підводиться до магніту кабелем, що приєднаний до висновків котушки.
Робота магніту аналогічна роботі соленоїда, коли при пропущенні по котушці постійного струму виникає сила примагничивания FM чи притягання FM>G.
На вантажопідйомність магніту впливають наступні фактори:
1 Якість і форма поверхні вантажу. При гладкій плиті (сталеві чи болванки аркуші) вантажопідйомність магніту використовується на 100%, при перевантаженні чавунних паць і сталевого скрапу вона складає 6-33%, а при сталевій стружці 1,3-2,0%.
2 Хімічний склад матеріалу, що притягається. При змісті 4% Mn у металі вантажопідйомність магніту зменшується в 2 рази, а при змісті 4% Mn падає до нуля.
3 Температура поверхні вантажу. При t≤200°C вантажопідйомність не міняється, понад 200°C магнітна проникність вантажу значно знижується і при t=600°C вантажопідйомність магніту дорівнює нулю.
Вантажопідйомність магніту
де k – коефіцієнт впливу різних факторів на вантажопідйомність магніту, до=1 (плита), до=0,015 (стружка);
 – максимальна вантажопідйомність магніту (у вітчизняних =45т, в імпортних =50т)
– максимальна вантажопідйомність магніту (у вітчизняних =45т, в імпортних =50т)
Магнітна лебідка
1 – ланцюгова (зубцювата) передача
2 – кабельний барабан з багатошаровою навивкою
3 – струмознімач
4 – електрокабель
5 – електромагніт
6,7 – зірочки
8 – фрикційна муфта
9 – кабелеукладач
Кабельний барабан одержує обертання від барабана механізму підйому через ланцюгову (зубцювату) передачу. Зірочка 6 зафіксована на валу барабана механізму підйому, а зірочка 7 з'єднана з зовнішнім диском фрикційної муфти 8, внутрішні диски якої можуть обертатися щодо вала кабельного барабана 2. обертання внутрішніх дисків фрикційної муфти передається валу кабельного барабана через кулачковую муфту, що включають вручну. При роботі крана без магніту кабельний барабан відключають, виводячи кулачковую муфту з зачеплення. На валу кабельного барабана встановлюється кільцевий струмознімач. Укладання кабелю на барабан в один шар з рівномірним кроком навивки робить кабелеукладач.
Число витків на кабельному барабані
де Н – висота підйому;
DКАБ.Б. – діаметр кабельного барабана;
DК – діаметр кабелю
Передатне відношення відкритої передачі
де nКАН – число оборотів канатного барабана;
nКАБ – число оборотів кабельного барабана

 .
.
До технічних характеристик магніту, по яких він вибирається з каталогу відносяться: максимальна вантажопідйомність магніту; маса магніту; потужність; струм котушки; подводимое напруга; максимальна робоча температура нагрівання котушки. ПВ=50%.
Особливістю нагружения магнітних лебідок є підвищені динамічні навантаження при відриві матеріалу від штабеля вантажу (підйом сталевих аркушів зі штабеля, підйом прокату з металевої підлоги).

кДИН=1,3...1…1,4–неметалічна підстава
кДИН=1,8...2…2,0–металева підстава
Ці підвищені навантаження виникають при відриві вантажу внаслідок явища примагничивания, коли магнітне поле магніту охоплює також вантаж, що не підлягає підйому.
Таблиця – Технічні характеристики магнітів
| Параметры | Тип магнита | |||
| М22 | М82 | ПМ15 | ПМ25 | |
| 1 Вантажопідйомність QM, т | ||||
| 2 Потужність Р, кВт | 2,82 | 15,4 | 2,3 | 4,4 |
| 3 Маса mМ, кг | –– | –– | ||
| 4 Ток I, А | 15,8 | –– | –– | –– |
| 5 Габаритні розміри, мм | Æ800 | Æ1200 | 1100х475 | 1700х730 |
МЕТАЛУРГІЙНІ КРАНИ
1 Загальні зведення
У мартенівських цехах застосовують мульдо-завалочные крани, напально-завалочные машини, ливарні крани (міксерні, заливальні і разливочные) і крани для роздягання злитків (стрипперные).
У прокатних цехах застосовують колодцевые, крани для слябів, посадкові крани, крани з лапами.
У сталеплавильних цехах машинобудівних заводів застосовують мульдотранстортные, завалочні і разливочные крани.
У ковальсько-пресових цехах – кувальні крани, ковальські напольные маніпулятори і посадкові машини.
У термічних цехах – гартівні крани.
Спеціальні металургійні крани обслуговуються тільки машиністом, тому вимагають повної механізації загарбних органів, що мають жорстку підвіску.
Багато металургійних кранів виконують не тільки підйомно-транспортні, але і технологічні операції.
2 Мульдо-завалочные крани
2.1 Загальні зведення
Установлюються на грубних прольотах мартенівських цехів європейського типу із садкою печей до 100т і виконують наступні операції:
1 Завалка шихти;
2 Розрівнювання шихти на подині печі хоботом крана;
3 Установка мульд у два ряди на мульдовій лаві;
4 Допоміжні і ремонтні роботи, у тому числі ремонт печей
2.2 Пристрій крана
Мульдозавалочный кран складається з моста і двох візків. Кран має звичайну конструкцію моста мостового крана й один загальний чи два роздільних механізми пересування.
Малюнок – Схема мульдозавалочного крана
1 Головний візок, що переміщається по окремих подовжніх балках, що і допоміжний візок 2 (по одній чи колії по рівнобіжним);
3 Міст крана;
4 Шахта, жорстко зв'язана з рамою візка 1;
5 Колона, що вертикально переміщається по направляючим (вкладишах верхньої і нижньої траверс) шахти й обертова щодо шахти;
6 Кабіна з пультом керування краном, жорстко зв'язана з колоною 5;
7 Шатун, (чиканати ланцюги) механізму підйому колони;
8 Завзяті ролики, що запобігають відрив ходових коліс головного візка 1;
9 Хитна рама, хитання за допомогою кривошипно-шатунного механізму 10 і отже підйом і опускання мульди;
11 Вісь хитання рами;
12 Обертовий мундштук;
13 Фланцеве (болтове) чи клинове з'єднання мундштука з хоботом 14 (тверде з'єднання);
15 Прорізи, що виключають поломки механізму хитання хобота 14 для випадку, коли при підйомі нагору шатуна чи мульда кінець хобота упруться у тверду перешкоду;
16 Мульда з вантажем, з'єднана з хоботом 14 за допомогою механізму замикання мульди;
17 Мульдова лава шихтового чи грубного прольоту, на яку встановлюються навантажені чи порожні мульди;
18 Завалочне вікно печі 19.
Вантажопідйомність мульдозавалочного крана
Q=Q1+Q2=5+20 чи 3,2+10,
де Q1 – вантажопідйомність на кінці хобота;
Q2 – вантажопідйомність допоміжного візка.
На рамі головного візка 1 установлений: механізм підйому колони, механізм повороту колони і механізм пересування візка. У кабіні 6 установлений: механізм обертання хобота, механізм замикання мульди.
2.3 Конструкція і механізму підйому колони
Розрізняють 3 типи цих механізмів: шатунний, канатний і ланцюговий.
Найбільш надійним є механізм на шатунах, хоча він і тяжелее, чим механізми інших типів.
Механізм на канатах легкий, простій по конструкції, але вимагає частої зміни канатів (недовговічний).
Механізм на ланцюгах унаслідок витяжки ланцюгів зараз не застосовується.
Розглянемо механізм підйому колони на шатунах
1 Зубчасті колеса відкритої передачі;
2 Пальці кривошипів;
3 Складені шатуни, що виключають поломки в механізмі підйому для випадку, коли при опусканні колони, вона зустріне тверду перешкоду, а пальці кривошипів не дійдуть до нижнього мертвого положення;
4 Неповоротна голівка поворотної колони 5;
6 Верхній і нижній радіальні підшипники опори колони.
З позиції надійності в механізмі встановлюються два двигуни, кожний з який розрахований на необхідний режим роботи.
Розрахунок потужності привода механізму підйому колони
Малюнок – Розрахункова схема механізму підйому колони
Визначимо зусилля в шатуні Т

 (1)
(1)


 (2)
(2)

 (3)
(3)
З (1),(2),(3) знаходимо T,N1,N2
M0=T·OK – максимальний момент, що крутить, на валу кривошипа
 З DАОК
З DАОК
 OA=R (радіус)
OA=R (радіус)
AB=l
M0=T·ОА·sin((+?)= T·R·sin((+?)=var?const
Механізм працює в напруженому режимі, тому його потужність визначають як середньоквадратичну з урахуванням температури нагрівання
Потужність

де  – середньоквадратичний момент
– середньоквадратичний момент
2.4 Конструкція і розрахунок механізму обертання колони
Малюнок – Схема механізму обертання колони
1 – Рама візка;
2 – Привод механізму обертання, що включає черв'ячний редуктор з убудованої в нього муфтою граничного моменту;
3 – вертикальний вал, Що Плаває;
4 – Шестірня відкритої зубчастої передачі, опори вала, що закріплені на шахті;
5 – Складене зубчасте колесо відкритої передачі;
6,7 – радіальні підшипники верхньої і нижньої опор колони 8
Зубчасте колесо виконане рознімним і прикріплене болтами 9 до обертового частині верхньої траверси. Рознімним воно виконано для забезпечення монтажу і демонтажу;
10 – Повзуни, закріплені або на колесі 5, або на корпусі опори колони
Колона має три опори:
а) завзятий підшипник у неповоротній голівці колони;
б) радіальний підшипник у зубчастому колесі;
в) нижня радіальна опора
Розрахунок потужності привода механізму обертання колони
При визначенні необхідної потужності привода розглядається найбільш несприятливий випадок – несталий рух (чипуск гальмування) відразу трьох механізмів: механізму обертання колони, механізму пересування крана і механізму пересування візка
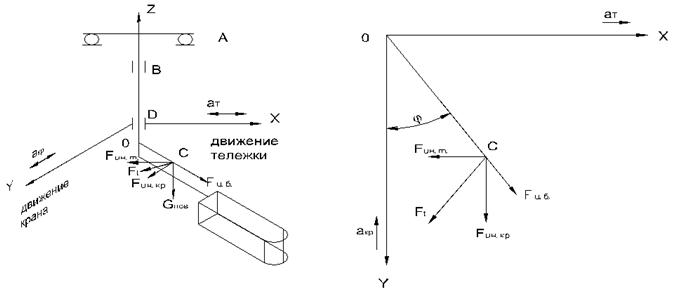
Відцентрова сила, що діє на кабіну і колону

аП – прискорення; ω – кутова швидкість; ОС – радіус обертання колони.
Тангенціальна сила (сила інерції маси кабіни і колони при чи розгоні гальмуванні їх навколо осі колони)
Сумарний момент сил інерції поворотної частини крана
МІН=ε·J, Н·м,
де J – момент інерції маси поворотної частини крана, кг·м2;
ε – кутове прискорення, 1/з2.
FИН.Т. – сила інерції маси кабіни і колони при чи розгоні гальмуванні візка
FИН.К. – сила інерції маси кабіни і колони при чи розгоні гальмуванні моста крана
Найбільший момент виникає при дії наступних сил
МСОПР=М0=Fτ·OC+FИН.Т.·ОС·cosφ+FИН.К.·ОС·sinφ+MTP.A+MTP.B+MTP.D=var,
де MTP.A, MTP.B, MTP.D - моменти від сил тертя, що виникають у верхньому і нижньому підшипниках і підп'ятнику колони.
Потужність двигуна привода обертання колони при пуску
 , квт.
, квт. 
Кут φ, при якому виникає  , можна визначити, якщо дорівняти до нуля похідну від МСОПР,
, можна визначити, якщо дорівняти до нуля похідну від МСОПР, 
При перемінному значенні φ
FИН.К.·ОС·cosφ– FИН.Т.·ОС·sinφ=0
відкіля
 ,
,
де φ0 – кут, ін якому МСОПР – максимальний;
аК – середнє прискорення моста крана;
аТ – середнє прискорення візка
Технічна характеристика крана по «Сибтяжмаш»
Q=5+20т VП.ГАКА=10 м/хв nХОБ=20 про/хв
L=17м VТЕЛ.ГР=45 м/хв VКАЧ.КІЛ=12 кач/хв
HП.КІЛ.=1м VТЕЛ.ВСП=35 м/хв
HП.ГАКА.=18м VКР=90 м/хв
Vпод.кіл.=5м/хв nКОЛ=4,5 про/хв
Напольно-завалочные машини
Здійснюють завалку шихти в мартенівські печі американського типу із садкою 600-900т. Перед печами по рейковому шляху переміщається тепловозом склад візків з навантаженими мульдами. На наступному рейковому шляху переміщаються напольно-завалочные машини. Вантажопідйомність цих машин досягає 10...15т.
Ливарні крани
1 Загальні зведення
По призначенню розрізняють три типи ливарних кранів: міксерний, заливальний, разливочный.
Міксерний кран працює в міксерному відділенні мартенівського цеху, здійснює підйом ковшів з рідким чавуном зі спеціальних залізничних вагонів чугуновозов і заливання рідкого чавуна в міксер. Міксер – ємність для збереження й осреднения складу рідкого чавуна. Місткість їх 1500т.
Завливочный кран працює в грубному прольоті мартенівського цеху, здійснює заливання рідкого чавуна в піч.
Разливочный кран – у разливочном прольоті, він робить розливання рідкої мартенівської сталі (чи конверторної) у изложницы.
Вантажопідйомність головних візків 100…630т, а допоміжних 20…100т. Q=Q1+Q2/Q3=630+90/16,
де Q1 – вантажопідйомність головного підйому,
Q2 – вантажопідйомність великого підйому,
Q3 – вантажопідйомність малого підйому.
2 Пристрій крана
1 – головні подовжні балки моста, по яких переміщається головний візок 2;
3 – допоміжні подовжні балки моста, по яких переміщається допоміжний візок 4. Вони розташовані між головними профільними балками;
5 – траверсу;
6 – пластинчасті ливарні гаки;
7 – цапфа ковша 8 з рідкою сталлю;
9 – вушко, що дозволяє робити розливання сталі через носок ковша за допомогою великого підйому допоміжного візка (у випадку чи аварії несправності пристрою для сифонного розливання стали, тобто через днище ковша)
Виконувані операції: а) разливочные; б) ремонт ковшів для рідкої сталі і шлаку; в) ремонт кранів, розташованих на нижньому ярусі цеху; г) допоміжні і збиральні операції
3 Конструкція й особливості розрахунку механізму головного підйому ливарного крана
1 – зубцюваті вінці, що знаходяться між собою в зачепленні і жорстко зв'язані з барабанами;
2 – зубчасті колеса з храповими пристроями;
3 – зрівняльні важелі;
4 – здвоєний канатний поліспаст великої кратності m=10...12
3.1 Особливості конструкції механізму
1 Механізм обладнаний двома двигунами, що підвищують надійність його роботи. При виході з ладу одного двигуна розливання повинне бути закінчене при одному справному двигуні. Найчастіше застосовують двигуни постійного струму послідовного порушення, що мають  (коефіцієнт перевантаження)
(коефіцієнт перевантаження)
2 С барабаном жорстко з'єднані зубцюваті вінці 1, що знаходячись між собою в зачепленні, забезпечують синхронний чи підйом опускання обох ливарних гаків, тобто виключається нахил ковша навіть при різних механічних характеристиках двигуна (нахил ковша можливий у випадку різної витяжки канатів одного і другого поліспастів).
3 Замість зрівняльних блоків у кожнім їх двох здвоєних поліспастів установлені зрівняльні важелі 3, що виключають падіння ковша при обриві однієї галузі поліспаста.
4 Установлені 4 гальма, кожний з який повинний удержати номінальна вага вантажу.
5 На тихохідних валах кожного редуктора встановлені храпові пристрої, що вирівнюють навантаження між двигунами і забезпечують роботу одним двигуном
6 Вантажні канати з металевим чи азбестовим сердечником
Малюнок Схема храпового пристрою
1 – зубчасте колесо на тихохідному валу редуктора, посаджене вільно на підшипнику ковзання 2 на маточину диска 3 і имеющее внутрішні храпові зуби 4.
5 – собачки шарніра зв'язані з диском 3, що жорстко (на шпонці) посаджений на тихохідний вал редуктора 6.
7 – шестірня відкритої передачі, установлена на тихохідному валу редуктора і знаходиться в зачепленні з зубцюватим вінцем барабана.
Принцип роботи храпового пристрою
1 При нормальних умовах, коли двигуни розвивають однакові моменти, храпові пристрої на обох приводах замкнуті (тобто собачки упираються в зуби храповика).
2 Коли один із двигунів збільшує обороти (наприклад через несправність системи керування) при роботі на підйом він починає швидше обертати барабан свого привода і барабан суміжного привода. У результаті чого диск 3 суміжні приводи починає також обертатися, а колесо 1 суміжного привода починає відставати, це приводить до розмикання храпового пристрою суміжного привода і собачки цього привода будуть прощелкивать по зубах храповика. У цьому випадку випереджальний двигун бере на себе подвійне навантаження і, відповідно до механічної характеристики його швидкість буде зменшуватися.
Двигун суміжного привода, будучи розвантаженим у результаті розмикання храпового пристрою буде збільшувати свою швидкість, і в результаті швидкості обох двигунів будуть вирівняні й обоє храпових пристрої будуть замкнуті.
3 Коли один із двигунів виходить з ладу, то гальма цього двигуна автоматично загальмують його ротор і всі обертові деталі на ділянці від двигуна до вихідного зубчастого колеса редуктора аварійного привода. У цьому випадку справний двигун бере на себе подвійне навантаження, а собачки прощелкивают по зубах храповика нерухомого зубчастого колеса.
4 При необхідності опускати вантаж у випадку виходу з ладу одного двигуна храповик спеціальною кнопкою розгальмовує гальма аварійного привода і робить спуск вантажу.
3.3 Особливості розрахунку
1 Визначення вантажопідйомності на канатах
QKAH=QH+mTP+mKP+mKAH,
де mTP – маса траверси;
mKP – маса гаків;
mKAH – маса канатів;
QH=QГР – номінальна вантажопідйомність крана, наприклад QH=630т;
QKAH=(1,12...1…1,14)QH
2Вибір каната
Канат з металевим або азбестовим сердечником вибирається за загальноприйнятою методикою, але перевіряється на аварійний випадок, коли відбувається обрив однієї галузі в одному з двох здвоєних поліспастів.


 ,
,
кількість кількість
простих поліспастів здвоєних поліспастів
в одному здвоєному
Обраний канат перевіряють на аварійну ситуацію
SАВ=2SMAX
 ,
,
nAB – аварійний запас міцності каната
3 Визначення необхідної потужності одного двигуна
 , квт
, квт
де QKAH,т VП, м/с
4 Визначення гальмового моменту одного гальма

5 Фактичне прискорення при пуску і гальмуванні не повинне перевищувати прискорення, що допускається
aф(п) (т)£[a]=0,1 м/с
Таблиця – Технічна характеристика ливарних кранів
| Параметри | Заводи виготовлювачі, фирмы | ||
| ПО «Сибтяжмаш» | «Морган» США | «Крупп» Германія | |
| Q,т | 450+90/16 | 454+68/23 | 450+100/25 |
| Vп.гл., м/мин | 2,1 | 5,1 | |
| Vп.б., м/мин | 5,45 | 6,8 | 10,2 |
| Vт.гл., м/мин | |||
| Vкр., м/мин | 46,5 | ||
| Мкр,т | ––– |
Крани для роздягання чи злитків стрипепрные крани
1 Загальні зведення
Сталь, розлита в изложницы, приблизно через 20 хвилин перетворюється у твердий злиток, якому необхідно витягти (роздягнути). При нормальному режимі остигання (відповідає ТУ) і відсутності дефектів у изложнице, при витягу злитка переборюється тільки або його вага, або вага изложницы (сили тертя між злитком і изложницей). У противному випадку виробляється примусове роздягання, що виконується або стрипперным краном, або напольным стрипперным механізмом. При цьому створюються великі сили опору при роздяганні злитків. Тому крани мають великі зусилля виштовхування.
Стрипперный кран має міст і спеціальний візок. Вантажопідйомність КРС Q1/Q2 – PC – L=32/12,5–2000–25,
де Q1 – вантажопідйомність на гаку;
Q2 – вантажопідйомність на малих кліщах Q2=QТЕЛ;
PC – зусилля стриппероваия (виштовхування), кН, крани бувають з PC 2000кН, 2500кН, 4000кН, 5000кН.
L – проліт крана, м
Міст крана виконаний із двох могутніх балок коробчатого перетину, що спираються на дві кінцеві балки.
Основними робочими органами цих кранів є великі і малі кліщі.
Малюнок – Схема крана для роздягання злитків:
1 –міст крана;
2 –візок;
3 –шахта, жорстко зв'язана з рамою візка;
4 –патрон, що переміщається по напрямних шахти;
5 –великі кліщі, шарнірно зв'язані з патроном;
6 –малі кліщі, що змінюють свій розчин у перпендикулярній площині великим кліщам;
7 –вантажна балка з гаком, підтримувана великими кліщами;
8 –магніт
Виконання операції
1 Три основні технологічні підйомно-транспортні операції по роздяганню злитків
2 Допоміжні, збиральні і ремонтні роботи
Схеми основних технологічних операцій стрипперного крана
 1 Роздягання злитка розширенням догори
1 Роздягання злитка розширенням догори
1 злиток;
2 -прибуткова частина злитка;
3  -малі кліщі;
-малі кліщі;
4 – великі кліщі
5 –упори великих кліщів;
6 –глуха изложница;
7 –піддон;
8 –вагонетка;
9 –рейковий шлях цеху;
10 –утеплювальна надставка на изложницу
При роздяганні злитка розширенням догори малі кліщі 3 захоплюють прибуткову частину 2 злитки 1 і піднімають його рицинами нагору. У цей час великі кліщі 4 упорами 5 притискають стінки изложницы 6 до піддона 7, розташованому на вагонетці 8, що переміщається по рейковому шляху 9 цеху. При роздяганні злитка малими кліщами зусилля виштовхування діють на злиток, на стінки изложницы і далі на упори великих кліщів. Це зусилля на піддон не передається. У стрипперном механізмі зусилля від великих і малих кліщів передається тільки на гвинт штемпеля і патрон, на піднімальний механізм крана, а отже і на міст не передається.
2 Роздягання злитка розширенням донизу
1 –злиток;
2 –наскрізна изложница;
3 –вуха (припливи) изложницы;
4 –великі кліщі;
5 –наконечник центрального гвинта стрипперного механізму;
6 –середні вушка великих кліщів;
7 –вагонетка
При роздяганні злитка розширенням донизу великі кліщі 4 середніми вушками 6 упираються в уші 3 изложницы і переміщають її нагору. У цей час наконечник 5 упирається в прибуткову частину злитка і не дозволяє останньому підніматися нагору разом з изложницей. У результаті подвійного впливу на злиток і изложницу сила виштовхування переборює опір стрипперованию, що діє на поверхні изложницы. Злиток залишається на піддоні, а изложница знімається великими кліщами зі злитка. Зусилля при цій операції діють на злиток і изложницу, а також гвинтову систему стрипперного механізму.
3 Відривши злитка від піддона (продовження операції)
 Якщо злиток приварився до піддона, то його відкривають малими кліщами 1. При цьому великі кліщі 2 упираються кінцями в піддон. При цьому зусилля від малих кліщів передається на злиток, піддон великі кліщі і не передається на піддон і міст крана.
Якщо злиток приварився до піддона, то його відкривають малими кліщами 1. При цьому великі кліщі 2 упираються кінцями в піддон. При цьому зусилля від малих кліщів передається на злиток, піддон великі кліщі і не передається на піддон і міст крана.
Взаємодія механізму підйому патрона і механізму керування
великими кліщами
1 –патрон, підтримуваний вантажними канатами а, усередині якого розміщений механізм виштовхування (стрипперования);
2 –великі кліщі;
3 хитне коромисло, шарнірно зв'язане з корпусом патрона 1;
4 –кронштейни жорстко зв'язані з патроном;
5 –барабан механізму підйому, показаний у двох площинах, на яких з однієї сторони навиваються вантажні канати а і канати керування б, а з іншого боку – канати противаги в;
6 –противага;
7 –двуплечий хитний важіль;
8 кривошипно-шатунний механізм керування великими кліщами
Малюнок – Схема взаємодії механізму підйому патрона і механізму керування великими кліщами
Особливості конструкції
1 На барабан механізму підйому намотується також галузь каната механізму керування з тією метою, щоб при підйомі й опусканні патрона великі кліщі не змінювали розчин.
2 Противага механізму підйому і храповий пристрій, установлена на тихохідному валу редуктора цього механізму, призначений для того, щоб виключити слабину у вантажних канатах і канатах керування у випадку, коли при опусканні патрона він зустріне тверду перешкоду (великі кліщі своїми упорами упруться в краї изложницы в першій чи операції великі кліщі своїми кінцями упруться в піддон у третій операції).
При твердому упорі і роботі двигунів на спуск різко зменшиться вантажний момент на валу барабана і стає менше моменту від ваги противаги на цьому ж валу. У результаті противага починає обертати барабан убік підйому, вибираючи слабину в канатах і розмикаючи при цьому храповий пристрій. Деталі на ділянці від двигуна механізму підйому до храпового пристрою можуть продовжувати працювати на спуск.
КОНСТРУКЦІЯ Й ОСОБЛИВОСТІ РОЗРАХУНКУ МЕХАНІЗМУ ПІДЙОМУ ПАТРОНА
Малюнок – Схема механізму підйому патрона
1 –барабан механізму підйому, що має три ділянки нарізки для здвоєних поліспастів: піднімальних, керування великими кліщами і противаги стрипперного механізму;
2 – храповий пристрій;
3 –кінцевий вимикач патрона
а-ділянки двухзаходной нарізки барабана для вантажних канатів;
б- ділянки однозаходной нарізки для канатів керування великими кліщами;
в- ділянки однозаходной нарізки для канатів противаг стрипперного механізму
Унаслідок великої маси стрипперного механізму і маси вантажу, що піднімається, він підвішений на восьми галузях канатів. Канавки для канатів виконані подвійними, а кратність поліспаста дорівнює двом. Другі кінці канатів прикріплені до балансирної системи.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 1433; Нарушение авторских прав?; Мы поможем в написании вашей работы!