КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Датчики углового ускорения 7 страница
|
|
|
|
Рис. 8. Кадр ЦРТА с ВРК:
1 – слово; 2 – импульсы синхронизации слов; 3 – символы;
Тк – длительность кадра;  – канальные интервалы (
– канальные интервалы ( );
);
 – синхронизирующий интервал.
– синхронизирующий интервал.
Кадр длительностью Тк состоит из N канальных интервалов  и синхронизирующего интервала
и синхронизирующего интервала  . Каждый канальный интервал содержит последовательность символов, соответствующих разрядам цифрового (двоичного) кода измерительных сигналов, которая вместе с импульсом синхронизации каналов называется словом. В приведенном примере принят восьмиразрядный код. В существующих системах цифровой радиотелеметрической аппаратуры обычно используется десяти – двенадцатиразрядный двоичный код. Структура кадра радиотелеметрической аппаратуры является важнейшей ее характеристикой, необходимой для планирования измерений и разработки программ обработки результатов.
. Каждый канальный интервал содержит последовательность символов, соответствующих разрядам цифрового (двоичного) кода измерительных сигналов, которая вместе с импульсом синхронизации каналов называется словом. В приведенном примере принят восьмиразрядный код. В существующих системах цифровой радиотелеметрической аппаратуры обычно используется десяти – двенадцатиразрядный двоичный код. Структура кадра радиотелеметрической аппаратуры является важнейшей ее характеристикой, необходимой для планирования измерений и разработки программ обработки результатов.
Радиотелеметрическая аппаратура предыдущих поколений, как правило, имела циклический (периодический) опрос, т.е. Тк = const. Существующая цифровая радиотелеметрическая аппаратура строится с периодическим опросом и изменяемым по заданной программе Тк. Перспективной является цифровая радиотелеметрическая аппаратура с изменяющимся Тк в зависимости от скорости изменения телеметрируемых процессов, позволяющая сократить избыточность информационного потока, В этих РТА (ЦРТА), называемых адресными, принят принцип разделения каналов по форме. Обычная радиолиния радиотелеметрической системы, имея определенную достаточно большую пропускную способность, рассчитанную на передачу максимального потока информации, описывающей состояние летательного аппарата в критических аварийных ситуациях, значительную часть времени работы передает избыточную информацию. В адресной радиотелеметрической аппаратуре избыточная информация не поступает в канал связи. При этом необходимая (неизбыточная) информация с каждого источника информации поступает в случайные моменты времени, интервал между которыми оказывается непостоянным (случайным), зависящим от скорости изменения сигналов. Поэтому сигналу с каждого датчика для его распознавания в приемном устройстве присваивается адрес.
Радиотелеметрическую аппаратуру принято характеризовать не только видом и количеством сообщений, но также информативностью – максимальным потоком информации, который может быть передан по каналу связи.
Основную долю погрешностей при радиотелеметрических измерениях (РТИ) вносят датчики. Однако в последние годы датчики, и, особенно, цифровые (частотные) имеют погрешность, сопоставимую с погрешностью радиотелеметрической аппаратуры.
Основными источниками погрешностей радиотелеметрической аппаратуры являются взаимная связь каналов, радиопомехи промышленных и естественных источников, появление переотраженных сигналов, изменение характеристик элементов под влиянием климатических и механических воздействий.
Особенностью цифровой радиотелеметрической аппаратуры является то, что помехи в канале связи сказываются не на точности результатов измерений, а на их достоверности. При обеспечении требуемых энергетических соотношений вероятность искажения символа составляет  , а вероятность искажения слова, т.е. получения недостоверного значения результата измерения приближенно оценивается выражением
, а вероятность искажения слова, т.е. получения недостоверного значения результата измерения приближенно оценивается выражением  , где n – число символов в слове; Р0 – вероятность искажения символа.
, где n – число символов в слове; Р0 – вероятность искажения символа.
Радиотелеметрическая аппаратура с временным разделением кадра и разделением по форме имеют еще одну характерную составляющую погрешности, называемую погрешностью интерполяции и связанную с прямым и обратным преобразованием непрерывного сигнала в дискретный.
Дальность действия радиотелеметрической аппаратуры определяется характеристиками радиотракта, включающего передатчик, передающую и приемную антенны, приемник, радиолинию борт – Земля.
Приемная антенна является принадлежностью радиотелеметрической аппаратуры. Приемные антенны современных систем радиотелеметрической аппаратуры обладают сравнительно широкой диаграммой направленности (несколько десятков градусов) и рассчитаны на прием сигнала с произвольной поляризацией. Это необходимо в связи с неопределенностью положения передающей антенны при различных эволюциях самолета. Для обеспечения уверенного приема сигналов при любых положениях летательного аппарата над горизонтом, предусматривается поворот антенны по азимуту на 360° и по углу места в пределах от 0 до 900. При проведении летных испытаний приемную антенну ориентируют максимумом диаграммы направленности в сторону летящего объекта с целью исключения потери мощности сигнала. Эта ориентация осуществляется автоматически или вручную оператором.
Конструкция бортовой антенны и ее размещение на самолете должны удовлетворять ряду требований: диаграмма направленности должна обеспечивать надежный прием на земле при всех возможных маневрах ЛА, а аэродинамическое сопротивление антенны должно быть минимальным.
Этим требованиям наилучшим образом удовлетворяют четвертьволновые штыревые антенны, располагаемые в передней части самолета вдоль его оси, обеспечивающие вместе с металлическим корпусом малую направленность излучения, или же щелевые антенны определенного количества и ориентации. При выборе места расположения бортовых антенн радиотелеметрической аппаратуры и их конструкции особое внимание обращается на электромагнитную совместимость со штатными радиосредствами.
3.2. СОВМЕЩЕННЫЕ АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ
Все более высокие требования к срокам и качеству летных испытаний и сокращение объемов, отводимых для контрольно–измерительной аппаратуры на летательном аппарате, в сочетании с развитием микроэлектроники привели к созданию совмещенных бортовых и радиотелеметрических систем. Обобщенная функциональная схема такой совмещенной системы показана на рис. 9.
|
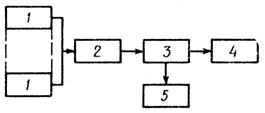
Рис. 9. Обобщенная функциональная схема совмещенной системы:
1 – датчики, 2 – вторичные преобразователи, 3 – коммутатор–сумматор,
4 – передатчик, 5 – магнитный регистратор.
Выходные сигналы датчиков после предварительного преобразования, включающего нормирование и сбор в единую группу, поступают одновременно на магнитный регистратор и передатчик радиотелеметрической аппаратуры. Таким образом, схема оборудования самолета для летных испытаний упрощается, общий объем и потребляемая энергия бортовой измерительной системы меньше, чем при раздельных бортовых и радиотелеметрических системах и, что особенно важно, структура кадра, регистрируемого на борту и на Земле, одинакова. Это позволяет применять единые алгоритмы и программы обработки результатов. В состав бортовой аппаратуры совмещенной системы обычно включается цифровое вычислительное устройство для предварительной обработки информации с целью сокращения избыточности, управления сбором и программой измерения, а также для обеспечения автоматического контроля всех технических средств совмещенных систем, размещаемых на самолете.
Агрегатированность технических средств и унифицированных структур сигналов в совмещенных системах позволяет их использование в различных условиях и для различных задач испытаний. Например, в полном составе для управления летным экспериментом в темпе его проведения или в составе бортовой измерительной системы с дальнейшей послеполетной обработкой результатов.
С целью управления летным экспериментом в темпе его проведения в составе приемно–регистрирующей аппаратуры совмещенных систем могут предусматриваться ЭВМ и устройства отображения, с помощью которых, руководитель эксперимента принимает решение и выдает на испытуемый самолет команды управления или коррекции режимов полета (или режимов работы испытуемых систем).
В некоторых совмещенных системах предусматривается возможность управления летным экспериментом не с Земли, без использования радиоканала. Для этого в состав бортовой части вводятся те или иные устройства отображения, позволяющие экспериментатору, находящемуся на самолете, наблюдать за ходом летного эксперимента и принимать соответствующие решения по управлению им. Управление летным экспериментом без использования радиотелеметрического и командного радиоканалов целесообразно при проведении летных исследований опытных и перспективных систем самолета, силовых установок, навигационных систем на летающих лабораториях. Отсутствие радиоканалов повышает помехоустойчивость и надежность системы управления таким летным экспериментом в целом, а непосредственное общение на самолете экспериментатора с пилотом и штурманом уменьшает запаздывание реализации решения. Однако вычислительное бортовое устройство, имея меньшую память, чем ЭВМ, размещаемая на Земле, естественно, в известной мере ограничивает возможности обработки результатов в реальном масштабе времени.
Лекция 13.
Тема: ИЗМЕРЕНИЕ ТРАЕКТОРИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
1. ИЗМЕРИТЕЛЬНАЯ ТРАССА
Целый ряд задач, возникающих при летных испытаниях, требует знания траектории полета летательного аппарата. Траекторию самолета можно определить измерительными средствами, установленными на борту самолета или вне его. Практически, за редким исключением, траекторные измерения выполняют измерительными средствами, расположенными на Земле. В некоторых случаях измерительные средства размещаются на специально оборудованном летательном аппарате.
К траекторным измерительным средствам можно отнести:
· оптические (кинотеодолиты, фоторегистрирующие средства), обладающие высокой точностью измерений и применяемые при оценке взлетно–посадочных характеристик самолетов, аппаратуры слепой посадки, тарировки приемника воздушного давления (ПВД) и т.п.;
· радиотехнические (фазовые пеленгаторы, измерительные радиолокаторы), которые, уступая оптическим по точности измерений, имеют ряд достоинств и, в первую очередь, независимость от метеоусловий.
В состав измерительной трассы, кроме траекторных измерительных средств, входят приемные радиотелеметрические станции, системы единого времени (СЕВ), сбора и передачи измерительной информации с измерительных пунктов в вычислительный центр (ВЦ), связи и управления летным экспериментом.
Отдельно расположенное измерительное средство или их группа с ориентирами и устройствами для юстировки измерительных средств, местной СЕВ, аппаратурой регистрации, первичной обработки, преобразования и передачи измерительной информации по линиям связи в ВЦ средствами связи образуют измерительный пункт (рис. 1).
|
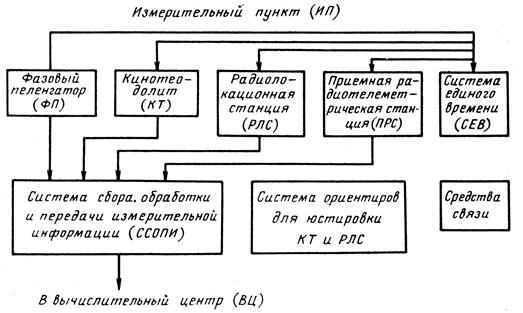
Рис. 1. Схема измерительного пункта.
На измерительной трассе обычно находится несколько измерительных пунктов. Размеры (протяженность) измерительной трассы определяются типами испытываемых самолетов и задачами их испытаний. Измерительная трасса должна обеспечить при заданных условиях полета самолетов и их количества выполнение измерений с требуемой точностью, надежностью и эффективностью, которая зависит от целого ряда факторов (рис. 2).
|
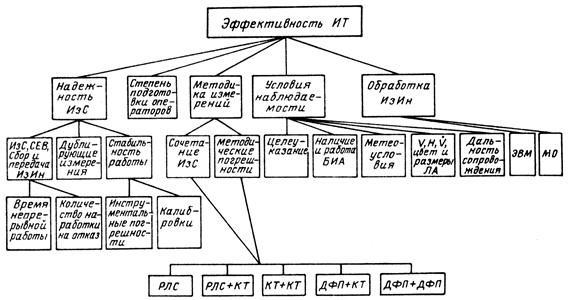
Рис. 2. Факторы, влияющие на эффективность измерительной трассы.
Дальность действия измерительной трассы определяется дальностью действия отдельных измерительных пунктов, их количеством и размещением на измерительной трассе.
Под траекторией полета летательного аппарата понимается ряд последовательных положений его центра масс в пространстве в зависимости от времени. Летательный аппарат рассматривается при этом как материальная точка. Траектория представляется кривой, аппроксимирующей совокупность отсчетов текущих координат во времени.
Траекторные измерения являются косвенными измерениями. Измерительными средствами непосредственно определяются составляющие вектора положения летательного аппарата (или их совокупность) – дальность, углы визирования, косинусы направляющих углов (направляющие косинусы), называемые первичными параметрами. Состав первичных параметров определяет метод измерения траектории. По первичным параметрам рассчитывается траектория летательного аппарата в заданной системе координат согласно выражениям

где  – текущие координаты траектории летательного аппарата, t – текущее время,
– текущие координаты траектории летательного аппарата, t – текущее время,  – текущее значение первичных параметров.
– текущее значение первичных параметров.
Система траекторных измерений состоит из следующих подсистем:
· наземных измерительных средств, измеряющих текущие значения первичных параметров траектории полета летательного аппарата, ориентиров для юстировки измерительных средств;
· бортовой аппаратуры или средств, необходимых для взаимодействия с наземными измерительными средствами или выполняющих измерения на летательном аппарате автономно;
· аппаратуры единого времени, создающей шкалу времени, обеспечивающую привязку к этой шкале всех измерений (измерительных средств трассы и летательного аппарата), а также выдачу импульсов с заданной частотой, необходимых для управления работой измерительных средств;
· аппаратуры преобразования, регистрации, предварительной обработки, сбора и передачи измерительной информации в ВЦ.
Система траекторных измерений должна обладать высокой точностью измерений первичных параметров и привязки их через СЕВ к другим видам измерений, обеспечивать непрерывное измерение траектории на всей трассе полетов летательных аппаратов или на отдельных ее участках, а также допускать оперативную обработку результатов измерений траектории в темпе времени с целью использования ее в системе управления летным экспериментом.
В зависимости от целей летных испытаний результаты траекторных измерений представляются в различных системах координат.
Системы координат. Геодезические (географические) координаты используются для точного определения места положения (привязки к местности), юстировочных ориентиров. При этом вводится понятие уровневой поверхности Земли, представляющей собой поверхность мирового океана (без волн, приливов и течений), мысленно продолженную в сторону суши так, чтобы она всюду пересекала отвесные линии под прямым углом. Геометрическое тело, ограниченное этой поверхностью, называется геоидом. Для территории России за поверхность геоида принята уровневая поверхность, проходящая через нуль кронштадского футштока. Первым приближением к поверхности геоида служит сферическая поверхность со средним радиусом, равным 6371 км. Такое представление формы Земли оказывается достаточным для решения многих практических задач летных испытаний. Вторым приближением к геоиду является референц–эллипсоид Красовского, который принят за модель Земли для всех геодезических работ, проводимых в России. Его большая (экваториальная) полуось а = 6 378 245 м; малая (полярная) полуось b = 6 356 863 м; полярное сжатие  = 1: 298,3; первый эксцентриситет е2 = 0,00669342; второй эксцентриситет (е’)2 = 0,00673853.
= 1: 298,3; первый эксцентриситет е2 = 0,00669342; второй эксцентриситет (е’)2 = 0,00673853.
Геодезическими (географическими) координатами являются угловые величины, называемые долготой (L) и широтой (В), которые определяют положение точки земной поверхности относительно начального (Гринвичского) меридиана и экватора соответственно. Если координаты в такой системе получают при помощи геодезических измерений и последующих вычислений на поверхности референц–эллипсоида, то такие координаты называют геодезическими.
Геодезическая широта В – угол между нормалью к поверхности эллипсоида в данной точке и плоскостью экватора. Геодезическая долгота L – двугранный угол между плоскостью начального (нулевого) меридиана и плоскостью меридиана данной точки. Координатными линиями служат параллели (широты) и меридианы (долготы), изображаемые на картах.
Координаты Гаусса–Крюгера используются при измерениях на небольших участках земной поверхности. Система координат при этом плоская и представляет собой проекцию земного эллипсоида на поверхность эллиптического цилиндра, а затем на плоскость. На один цилиндр проектируется зона земной поверхности, занимающая по долготе 60, следовательно, вся поверхность, Земли проектируется на 60 цилиндров. Каждый цилиндр касается земного эллипсоида по среднему меридиану зоны (рис. 3). Проекция Гаусса–Крюгера конформна, равноугольна, т.е. сохраняет на плоскости углы изображаемых фигур, равновелика – не искажает площади и равнопромежуточна, т.е. не искажает длины.
|
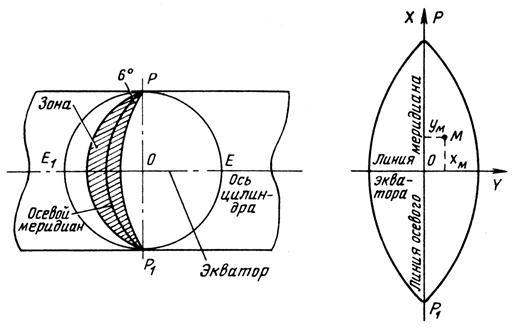
Рис. 3. Координаты Гаусса–Крюгера.
Поэтому ее можно практически считать планом. В каждой зоне осями прямоугольных координат служат средний меридиан зоны, изображаемый на плоскости осью абсцисс X, и экватор – осью Y. Гринвичский меридиан принят западным меридианом шестиградусной зоны № 1. Номера зон возрастают с запада на восток. Долгота шестиградусной зоны с номером N определится по формуле  .
.
Для каждой зоны вместо географической сетки (широты, меридианы) на проецируемой поверхности строят прямоугольную сетку координат, называемую координатами Гаусса–Крюгера. При пересчете прямоугольных координат (х, у) Гаусса–Крюгера в географические можно пользоваться следующими приближенными формулами:
 ,
,
 ,
,
где х и у в км.
Геоцентрическая система координат используется, в основном, как вспомогательная, дающая возможность пересчета координат летательного аппарата из одной системы в другую, например, из местной системы в любую прямоугольную, выбранную на земной поверхности. Кроме этого, если необходимо знать положение любой точки М, находящейся во внешнем пространстве Земли, пользуются геоцентрической центральной прямоугольной пространственной системой координат.
В этой системе за начало координат принимается центр референц–эллипсоида. Ось  направлена по полярной оси эллипсоида, ось
направлена по полярной оси эллипсоида, ось  образуется пересечением плоскости меридиана Гринвича и плоскости экватора, ось
образуется пересечением плоскости меридиана Гринвича и плоскости экватора, ось  дополняет систему до правой (рис. 4).
дополняет систему до правой (рис. 4).
|
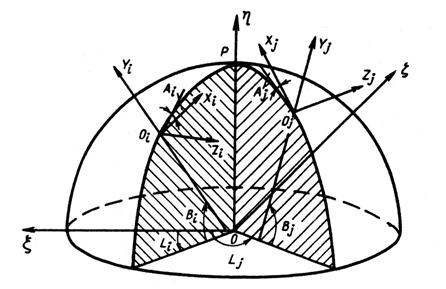
Рис. 4. Схема геоцентрических, географических и местных
прямоугольных координат.
Взаимосвязь между координатами точки в геоцентрической системе координат  и географической – В и L выражается формулами:
и географической – В и L выражается формулами:

где  – длина нормали от точки М до пересечения с осью .
– длина нормали от точки М до пересечения с осью .
Присутствие в формулах длины нормали N дает возможность определить превышение точки М над референц–эллипсоидом. Увеличив длину нормали на высоту Н, получим значение координат точки М в геоцентрической системе с учетом превышения данной точки (пункта) над уровнем моря:

В практике трассовых измерений для непосредственного наблюдения за летательным аппаратом пользуются прямоугольными системами координат. Для предварительного выбора направления осей координат (местных и трассовых), расположения измерительных пунктов, отсчета расстояний и т.п. используют географические карты в проекции Гаусса–Крюгера, которые можно рассматривать как план местности зоны полетов аэродрома. Точная привязка (не хуже 3 класса) начал местных и трассовых координат, ориентиров и т.п. выполняется топографической службой.
Траектория полета летательного аппарата должна быть представлена в такой системе координат, которая не требует сложных пересчетов при подготовке к анализу результатов испытаний. В связи с тем, что каждый измерительный пункт может измерять траекторию летательного аппарата на ограниченном участке, траекторные измерения выполняются ими в местной системе прямоугольных координат с началом в определенной точке данного измерительного пункта. Обычно за начало местной системы координат принимают точку фокуса кинотеодолита (КТ), находящего на измерительном пункте. Если для траекторных измерений применяется радиолокационная станция, то за начало координат принимают центр параболоида ее антенны, а если фазовый пеленгатор – то центр антенного поля. Направление оси X местной системы координат для оптических измерительных средств и радиолокационной станции выбирается на север, для фазовых пеленгаторов – по одной из осей антенного поля. Ось Y направлена вверх перпендикулярно к поверхности эллипсоида Красовского. Ось Z дополняет систему координат до правой.
Если траекторные измерения выполняются несколькими измерительными пунктами, то их результаты представляются в единой трассовой системе координат, начало которой должно быть точно определено геодезической привязкой. Направление оси X трассовой системы координат можно выбрать вдоль основной взлетно–посадочной полосы или вдоль направления интенсивных испытательных полетов. Направление осей Y и Z такое же, как и для местной системы координат. На рис. 5 приведена схема трассовой и местных систем координат.
|
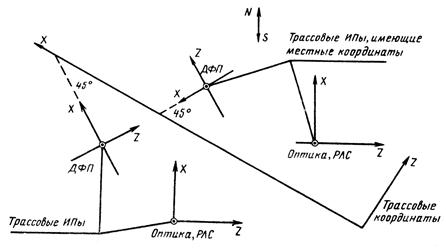
Рис. 5. Схема трассовых и местных координат.
Координаты  одной прямоугольной системы пересчитываются в другую, имеющую координаты х, у, z, поворотом осей на угол между ними с последующими переносом начала координат Оi одной системы в начало – О другой.
одной прямоугольной системы пересчитываются в другую, имеющую координаты х, у, z, поворотом осей на угол между ними с последующими переносом начала координат Оi одной системы в начало – О другой.
где  – направляющий косинус между осями Xi и X;
– направляющий косинус между осями Xi и X;  – то же между осями Yi и Х и т.д.;
– то же между осями Yi и Х и т.д.;  – старые координаты нового начала. Можно также пользоваться уравнениями, полученными путем смещения осей в новое начало, а после этого их поворотом.
– старые координаты нового начала. Можно также пользоваться уравнениями, полученными путем смещения осей в новое начало, а после этого их поворотом.
|












Рекомендуется следующая последовательность пересчета координат начала одной системы в другую и направляющих косинусов между осями координат (при этом используется геоцентрическая система координат):
· вычисление положения начала (Оi) координат местной системы OiXiYiZi в геоцентрической системе  ;
;
· вычисление координат начала (О) геоцентрической системы в местной системе OjXjYjZj;
· определение направляющих косинусов между осями местных систем XiYiZi XjYjZj и осями геоцентрической системы  ;
;
· перенос координат из одной системы XiYiZi в другую XjYjZj.
Положение начала Оi местной системы координат в геоцентрической определяется уравнениями связи между геоцентрической и геодезической системами координат с у четом превышения (Hi) точки Оi над поверхностью эллипсоида.

Здесь  – координаты точки Оi в геоцентрической системе координат.
– координаты точки Оi в геоцентрической системе координат.
Координаты начала (О) геоцентрической системы в местной системе координат определяются следующими выражениями:

При этом полагается, что начало системы координат XjYjZj находится в точке Oj с геодезическими координатами Lj, Вj; ось ОjYj направлена по нормали к поверхности референц–эллипсоида, ось OjXj направлена по азимуту Aj, отсчитываемому по часовой стрелке из пункта наблюдения от северного направления до направления визирования на объект.
Для вычисления направляющих косинусов между осями местной системы XjYjZj и осями геоцентрической системы координат привлекаются выражения, определяющие координаты  точки Оi в системе координат ХjYjZj:
точки Оi в системе координат ХjYjZj:



В этих выражениях коэффициенты при являются постоянными для каждой координатной системы. Обозначив их буквой  с соответствующими индексами, имеем:
с соответствующими индексами, имеем:



|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 721; Нарушение авторских прав?; Мы поможем в написании вашей работы!