КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Фазовые пеленгаторы
|
|
|
|
Радиолокационные станции (РЛС).
В современных радиолокационных станциях используют моноимпульсный метод слежения за летательным аппаратом в отличие от ранее применявшихся радиолокационных станций с коническим сканированием.
В моноимпульсной радиолокационной станции каждый импульс от летательного аппарата дает полную информацию о его угловых координатах. Это достигается одновременным сравнением амплитуд и фаз сигналов, принимаемых четырьмя неподвижными антеннами (по две в горизонтальной и вертикальной плоскостях, перпендикулярных друг другу), которые смещены относительно опорного направления. На выходе антенной системы в радиолокаторе находится устройство, вырабатывающее сумму и разность сигналов (принятых парой антенн в каждой плоскости), которые сравниваются между собой. Амплитуда разностного сигнала содержит информацию о величине отклонения углового положения летательного аппарата от опорного направления, а разность фаз между суммарным и разностным сигналами определяет знак этого отклонения.
Суммарная погрешность измерения с помощью радиолокационной станции состоит из инструментальных погрешностей (механические, электрические) и погрешностей, связанных с условиями измерений (дальность измерений, распространение радиоволн, динамика движения летательного аппарата и т.д.).
Кроме проверки перед каждой работой электрической, электронной и механической частей радиолокационная станция подлежит юстировке с регистрацией данных по каналу дальности и каналам измерения углов. Для этой цели используются геодезически привязанные ориентиры с отражательными уголками, а если расстояние от ориентира превышает 3 км, то на ориентире можно установить приемоответчик.
В современных радиолокационных станциях для точной наводки центра параболоида антенны на ориентир существуют телевизионные устройства.
На рис. 1 изображена схема фазовой пеленгации в одной плоскости.
|
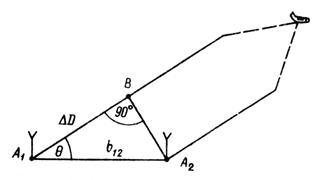
Рис. 1. Принцип работы фазового пеленгатора.
Для работы фазового пеленгатора необходимо, чтобы установленный на летательном аппарате радиопередатчик непрерывно изучал радиоволны, принимаемые наземным фазовым пеленгатором на разнесенные антенны. В связи с большой удаленностью летательного аппарата от фазового пеленгатора направление прихода радиоволн можно считать параллельным. Разность фаз электромагнитных колебаний, принятых антеннами, определяет на плоскости направление на летательный аппарат, что видно из рис. 8 и формулы
 ,
,
где Ф – измеренная разность фаз;  – длина радиоволн; b – длина базы;
– длина радиоволн; b – длина базы;  – относительная длина антенной базы (в длинах волн). Для определения направления на летательный аппарат в пространстве необходимо знать две угловые координаты – азимут
– относительная длина антенной базы (в длинах волн). Для определения направления на летательный аппарат в пространстве необходимо знать две угловые координаты – азимут  и угол места
и угол места  . Поэтому в фазовых пеленгаторах существуют две пары антенн с перпендикулярными осями. Тогда позиционную линию на летательный аппарат можно найти как линию пересечения двух конических поверхностей, которые, с известным приближением, заменяют гиперболоиды вращения. Направляющие косинусы связаны с угловыми координатами летательного аппарата – углом места () и азимутом () следующими зависимостями:
. Поэтому в фазовых пеленгаторах существуют две пары антенн с перпендикулярными осями. Тогда позиционную линию на летательный аппарат можно найти как линию пересечения двух конических поверхностей, которые, с известным приближением, заменяют гиперболоиды вращения. Направляющие косинусы связаны с угловыми координатами летательного аппарата – углом места () и азимутом () следующими зависимостями:
 ,
,
 .
.
Определенным недостатком фазовых систем является многозначность отсчета углов. Для того, чтобы быть чувствительной к изменению угла, фазовая аппаратура должна иметь большой размер относительной базы . С другой стороны, с ростом уменьшается значение угловой координаты, при котором разность фаз превосходит значение  , что вызывает неоднозначность отсчета. Обычно ее исключают многошкальностью, т.е. использованием нескольких баз. При этом меньшая база образует грубую (
, что вызывает неоднозначность отсчета. Обычно ее исключают многошкальностью, т.е. использованием нескольких баз. При этом меньшая база образует грубую ( ), но однозначную шкалу отсчета, а большая (точная) – точную, но неоднозначную шкалу отсчета. Многошкальная аппаратура дает правильный отсчет тогда, когда удвоенная максимальная погрешность измерения фазы по грубой шкале
), но однозначную шкалу отсчета, а большая (точная) – точную, но неоднозначную шкалу отсчета. Многошкальная аппаратура дает правильный отсчет тогда, когда удвоенная максимальная погрешность измерения фазы по грубой шкале  не превышает интервал точной шкалы. Величины косинусов направляющих углов
не превышает интервал точной шкалы. Величины косинусов направляющих углов  и
и  находятся по измеренной разности фаз Фх, Фz.
находятся по измеренной разности фаз Фх, Фz.
Базы между антеннами осей х и z выбираются равными. Тогда  . Координаты
. Координаты  траектории летательного аппарата определяются измеренными косинусами направляющих углов двух фазовых пеленгаторов и величиной базы
траектории летательного аппарата определяются измеренными косинусами направляющих углов двух фазовых пеленгаторов и величиной базы  между ними.
между ними.
Измеренные данные регистрируются на магнитную ленту или вводятся в линию связи для передачи на ВЦ и их последующей обработки.
На рис. 2 изображена схема фазового пеленгатора.
|
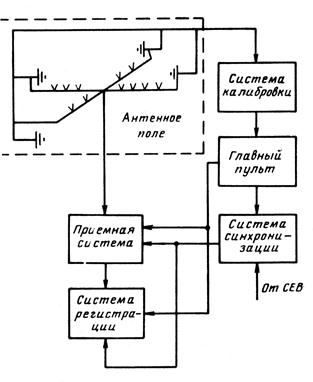
Рис. 2. Схема фазового пеленгатора.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 2995; Нарушение авторских прав?; Мы поможем в написании вашей работы!