КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Так как
|
|
|
|
Тогда

При переборе ( пер = 1/16) уравнение кинематического баланса будет
пер = 1/16) уравнение кинематического баланса будет

откуда

Для дюймовой резьбы вместо t нужно подставить величину 25, 4 / к (к - число ниток на дюйм резьбы), потому что шаг дюймовой резьбы (в мм) выражается этой величиной, т. е.

Для модульной резьбы вместо t подставляют πm (шаг модульной резьбы t = πm мм), и формула настройки получает следующий вид:
При необходимости затыловать червячные колеса с питчевым шагом вместо t в указанные выше формулы нужно подставить величину

(где Р — питч).
Делительная цепь. Возвратно-поступательное движение суппорта с резцом осуществляется от шпинделя VII через цепь деления - зубчатые колеса перебора

вал V, передачу  , вал XI, сменные зубчатые колеса гитары деления
, вал XI, сменные зубчатые колеса гитары деления  ∙
∙ , вал XII, дифференциал с передаточным отношением i = 2, вал XIII, цилиндрическую пару
, вал XII, дифференциал с передаточным отношением i = 2, вал XIII, цилиндрическую пару  , вал XIV, конические колеса
, вал XIV, конические колеса  , вал XV и кулачок К. Расчетные перемещения цепи деления в случае затылования дисковых фрез и фрез с прямыми канавками:
, вал XV и кулачок К. Расчетные перемещения цепи деления в случае затылования дисковых фрез и фрез с прямыми канавками:
1 об. шпинделя→ z об. кулачка,
где z — число зубьев затылуемой фрезы.
Уравнение кинематического баланса цепи деления:
откуда

У станка вал деления XIV проходит между направляющими станины. Кулачок К при вращении сообщает возвратно-поступательное движение пальцу 1 и затыловочным салазкам 2. Салазки 2 совершают возвратно-поступательное движение по направляющим плиты, которая может быть повернута к оси заготовки на угол ± 90° при ручной работе и на ± 15° при полуавтоматической. Поворотом плиты пользуются для затылования поверхностей, расположенных под разными углами к оси заготовки.
На затыловочных салазках располагаются поперечные 3 и продольные 4 салазки (рис. 3.23,б). Поперечные салазки могут получать поперечную подачу от цилиндра 5 гидропривода или перемещаться вручную при вращении квадрата 6. Продольные салазки 4 перемещаются только вручную путем поворота квадрата 7. На салазках размещён резцедержатель.
Движение затыловочного суппорта вперед осуществляется кулачком К (рис. 3.23,а), а обратный ход - пружиной 8, всегда прижимающей палец 1 к кулачку К.
Дополнительное вращение кулачка необходимо при затыловании фрез с винтовыми канавками. Это осуществляется от ходового винта через сменные колеса гитары диф-
ференциала

Расчет при настройке станка на дополнительное вращение кулачка ведется из условия, что при воображаемом перемещении суппорта на длину шага винтовой канавки Т кулачок совершает дополнительно ± z об. Знак (+) соответствует увеличению числа двойных ходов резца, знак (–) уменьшению этого числа. При различных направлениях винтовых линий червячной нарезки и продольной винтовой канавки берут знак (+), при одноименных - знак (–). В последнем случае на гитаре дифференциала необходимо установить паразитное зубчатое колесо. Иначе говоря, необходимо, чтобы за 1 об. шпинделя (заготовки) кулачок дополнительно получил z об. Для этого в станке предусмотрена цепь дифференциала.
об. Для этого в станке предусмотрена цепь дифференциала.
Если ведется затылование червячной фрезы, то муфту на валу XVI включают, а тройной блок на валу XIX выключают, и движение от ходового винта передаётся кулачку К через конические колеса  , цилиндрическую зубчатую передачу
, цилиндрическую зубчатую передачу  , сменные зубчатые колеса
, сменные зубчатые колеса  , червячную передачу
, червячную передачу  , дифференциал, передачу и коническую пару колес
, дифференциал, передачу и коническую пару колес  .
.
Расчетные перемещения цепи дифференциала при затыловании червячных фрез:

Уравнение кинематического баланса цепи дополнительного вращения кулачка (цепи дифференциала):

то
При затыловании цилиндрических фрез с винтовыми канавками расчетные перемещения цепи дифференциала:

В этом случае муфту на валу XVI и гайку ходового винта выключают, а муфту М5 и тройной блок на валу XIX включают. При этом продольная подача суппорта происходит с помощью ходового вала.
Учитывая, что 1 об. шпинделя при этом соответствует s мм продольного перемещения суппорта с резцом, запишем расчетные перемещения цепи дифференциала в следующем виде:

Уравнение кинематического баланса цепи дифференциала для этого случая:

откуда
Установка глубины резания. На винте поперечного перемещения салазок 3 суппорта (рис. 3.23, б) смонтирован храповой механизм автоматической установки резца на глубину резания.
При обработке дисковых фрез с автоматической установкой глубины резания механизм, приводимый в действие от кулачка, включает путевой переключатель, а тот, в свою очередь, электромагнит гидропанели. Электромагнит передвигает золотник, пропускающий масло под давлением в гидроцилиндр 5. При этом поршень 9 передвигает вправо рейку m = 1, которая через зубчатое колесо 10, собачку 11 и храповое колесо 12 поворачивает винт с шагом t = 2 мм, осуществляя поперечное перемещение салазок.
При включении электромагнита золотник соединяет цилиндр 5 со сливом, и поршень 9 под действием пружины возвращается в исходное левое положение. Для ручного перемещения салазок сначала отключается от храпового колеса собачка, а затем с помощью квадрата 6 вращается винт поперечного перемещения.
При обработке многозаходных фрез для установки резца в положение, необходимое для обработки следующего захода зубьев фрезы, пользуются рукояткой включения муфт М1 и М2, квадратом 13 (рис. 3.23,а) и маховичком, сидящим на валу электродвигателя. Рукояткой включают муфту М1 или муфту М2. При включенной муфте М1 вращение передается от шпинделя VII валу XI и через кинематическую цепь кулачку К. При выключенной муфте М1 кулачок К остается неподвижным, а шпиндель VII можно повернуть квадратом 13 в положение, необходимое для обработки зубьев следующего захода фрезы.
При ручном вращении маховичка на валу электродвигателя осуществляется еще более медленный и точный поворот шпинделя VII.
Лекция № 4. Токарно-револьверный автомат мод. 1Б140 ( Главное движение. Привод подачи и вспомогательных перемещений. Барабаны управления и самовыключающиеся однооборотные муфты. Шпиндельная бабка. Револьверный суппорт. Коробка подач. Конструкция поперечного распределительного вала. Поперечные и продольные суппорты).
Токарно-револьверный автомат мод. 1Б140
Автомат мод. 1Б140 предназначен для серийного и массового производства деталей из круглого, квадратного и шестигранного калиброванного прутка. В качестве приспособления станок может иметь магазинное устройство для обработки деталей из штучных заготовок.
Техническая характеристика автомата
Наибольший диаметр обрабатываемого прутка, мм... 40; Число частот вращения шпинделя...13; Частота вращения шпинделя, об/мин: (левое вращение...160-2500, правое вращение... 63-1000); Число суппортов: револьверных...1, поперечных... 2, вертикальных... 2, продольных...1.
На рис. 4.1 представлен общий вид автомата. На основании 1 установлена станина 7 со шпиндельной бабкой 4, револьверным суппортом 8, имеющим шестипозиционную револьверную головку 6, и поперечными суппортами: двумя горизонтальными 2 (передним и задним) и двумя вертикальными 5. На переднем поперечном суппорте расположен продольный суппорт 3, который может перемещаться в горизонтальной плоскости параллельно оси шпинделя или под углом к нему.
Инструментом револьверной головки, имеющей продольное перемещение, производится обтачивание, обработка отверстий и нарезание резьбы. Инструментом поперечных суппортов производится обработка фасонных поверхностей, подрезка, снятие фасок и отрезка готовой детали. Инструментом продольного суппорта производятся точение конусов и другие операции. Кинематическая схема автомата имеет три механически независимые цепи (рис. 4.2): главного движения, подачи и вспомогательных перемещений.
Главное движение шпиндель V получает от электродвигателя 1 через коробку скоростей 2...12 и клиноременную передачу 13 -14. Точение и сверлениеие на револьверных автоматах производят при левом вращении шпинделя. При помощи сменных колес al - bl шпиндель может получить три правые и три левые скорости вращения.
Привод подачи и вспомогательных перемещений. Вспомогательный вал VII - VIII вращается от электродвигателя 20 через червячную пару 21-22 ж кулачковую муфту 72. Вспомогательный вал делает 2 об/сек, а при выключенной муфте 72 его можно вращать вручную маховиком 30. От вспомогательного вала через червячную передачу 24 - 25 вращение передается командоаппарату 26 переключения скоростей шпинделя путем включения соответствующих электромагнитных муфт в коробке скоростей.
Через зубчатые колеса 27-28 - 29 вращение сообщается валу IX и барабанам 92 и 86 механизмом подачи и зажима прутка. Револьверная головка 43 при включении муфты 75 поворачивается при помощи колес 36 -37 - 38, 39 - 40 и мальтийского механизма 41 -42. От вала VIII через коробку подач и червячную пару 44 - 45 вращение передается первому распределительному валу XV, а через передачи 58-59 и червячную пару 60-61- второму распределительному валу XVI. Валы XV и XVI вращаются с одинаковой частотой.
На распределительном валу XVI установлены цилиндрический кулачок 78,
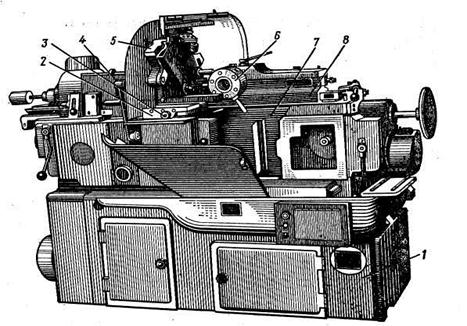
Рис. 4.1. Токарно-револьверный автомат мод. 1Б140 (кол)
осуществляющий подачу продольного суппорта 46, и барабаны 79, 80 и 81, включающие однооборотные муфты: 73 - поворота барабана командоаппарата 26; 74 - подачи и зажима прутка; 75 - поворота револьверной головки 43. Перед подачей прутка кулачок 88 (вал XVIII) при помощи зубчатого сектора 47 и колеса 48 поворачивает качающийся упор и устанавливает его против переднего торца шпинделя. После подачи прутка упор отходит в исходное положение. На валу XVI установлены дисковые кулачки 82, 83, 84 и 85. Первые два - для подачи вертикальных (50 в 51) суппортов, а вторые для подачи поперечных (52 и 53) суппортов.
На распределительном валу XV расположены дисковый кулачок 93 перемещения револьверного суппорта, барабан 90 лотка 54, отделяющего готовые детали от стружки, и барабан 91 муфты 76 переключения частоты вращения распределительных валов. Медленное вращение последних осуществляется от вспомогательного вала VIII через
зубчатые колеса коробки подач 32 - 35 - 63 и сменные колеса а - b или c - d, или е - f, а быстрое - через колеса 31- 34, 33 - 62 - 64.
Для вспомогательных движений служит электродвигатель 65, с помощью которого можно вращать быстроходный (сверлильный) шпиндель 49, установленный в одном из гнезд револьверной головки. Этот шпиндель, вращаясь в направлении, обратном вращению заготовки, позволяет получить достаточно высокую скорость резания при сверлении отверстий малого диаметра.
Барабаны управления и самовыключающиеся однооборотные муфты. Для работы автомата необходимо, чтобы все движения исполнительных механизмов осуществлялись в определенной последовательности. Это достигается с помощью барабанов управления, установленных на распределительных валах XV и XVI. На барабанах закреплены специальные сухарики, включающие исполнительные механизмы, которые после выполнения заданного цикла движения автоматически отключаются с помощью самовыключающихся однооборотных муфт. Ведущая часть 9 кулачковой муфты (рис. 4.3 а) вращается вместе с валом VII. На нем же свободно сидит подвижная полумуфта 3, которая справа имеет два удлиненных торцовых кулачках 4, входящих в вырезы ступицы зубчатого колеса 10. Пружина 11 стремится переместить полумуфту 3 влево, но палец 2, установленный на рычаге 8, находится в пазу муфты, не давая ей включаться.
Команда на включение муфты подается от распределительного вала IX {рис. 4.3 б)
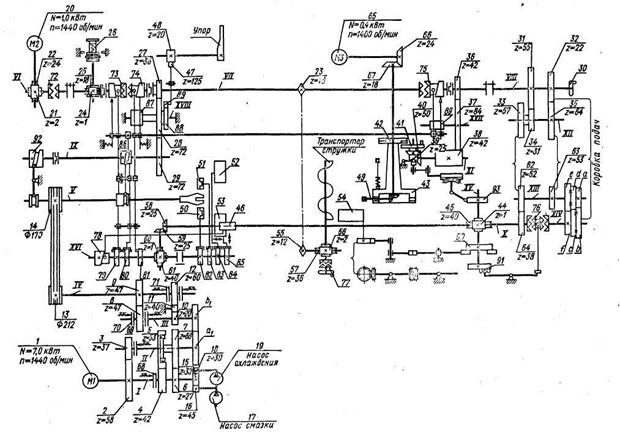
Рис. 4.2. Кинематическая схема автомата мод. 1Б140
кулачком 6 барабана 7. При вращении барабана кулачок поднимает правый конец рычага 5, и палец освобождает подвижную полумуфту 3. Под действием пружины 11 (рис. 4.3 а) она смещается влево и входит в зацепление с ведущей полумуфтой 9. Одновременно призматический фиксатор 1, сидящий на рычаге 5, выжимается из паза.
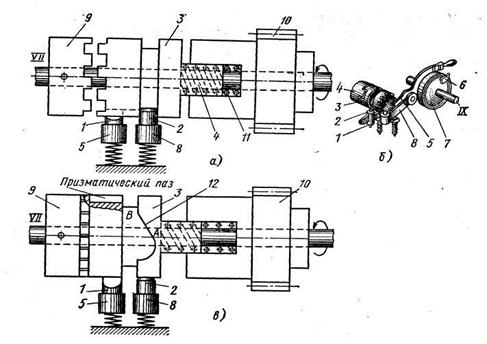
Рис. 4.3. Самовыключающиеся однооборотные муфты
В новом положений (рис. 4.3 в) детали 9 и 3 начинают вращаться вместе с валом VII, а палец 2 и фиксатор 1 скользят по. цилиндрическим поверхностям полумуфты 3. Когда фигурный паз 12 с рабочим скосом АВ подойдет к пальцу 2, последний под действием пружины западает в него, и при дальнейшем движении полумуфты палец, перемещаясь по скосу АВ, выжимает Эту полумуфту вправо и выводит ее из зацепления с полумуфтой 9. Одновременно фиксатор 1 западает в призматический паз полумуфты 3 и фиксирует ее.
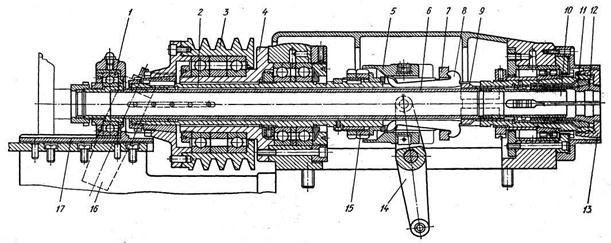
Шпиндельная бабка. На рис. 4.4. представлен продольный разрез шпиндельного узла автомата. Шкив 3, установленный на подшипниках кронштейна 4, связан со шпинделем 2, внутри которого расположен механизм подачи и зажима прутка. Он состоит из подающей цанги 10, ввернутой в правый конец трубы 6, зажимной цанги 12, стакана 11, втулки 13, трубы 9 и механизма перемещения этой трубы. Левый конец подающей трубы 6 закреплен в подшипнике 1, установленном на салазках 17, и перемещается с ними в направляющих вдоль оси шпинделя.
При перемещении муфты 5 влево длинные плечи рычагов 8 сближаются. Это приводит к повороту рычагов вокруг точек их опоры у неподвижного кольца 7, закрепленного на шпинделе. В результате этого короткие плечи рычагов смещают вправо зажимную трубу 9 и стакан 11, который своим внутренним конусом сжимает зажимную цангу 12. Пока муфта 5 находится в показанном на рисунке положении, самопроизвольное освобождение зажимной цанги невозможно.
Цикл зажимной операции протекает следующим образом. Подающая цанга находится в правом положении. Кулачок, установленный на барабане 81 (см. рис. 4.2), поднимает один конец рычага, противоположный конец которого, опускаясь, освобождает однооборотную муфту 74. Под действием пружины она перемещается влево, входит в зацепление с полумуфтой, жестко закрепленной на вспомогательном валу, и начинает поворачиваться, передавая вращение через зубчатые колеса 27, 28 и 29 на барабаны 92 и 86. Рабочие участки этих барабанов спрофилированы таким образом, что, повернувшись на один оборот, они с помощью рычагов 14 и 16 (рис. 4.4) перемещают: первый - муфту 5, второй - салазки 17. Салазки отходят влево на заданную длину подачи прутка. Лепестки цанги при этом скользят по зажатому прутку. После этого муфта 5 отходит вправо, освобождая зажимную цангу 2 и пруток. Затем салазки 17 с трубой 6, подающей цангой и прутком перемещаются вправо, и пруток доходит до откидного упора, который устанавливается в этот момент против торца шпинделя.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 528; Нарушение авторских прав?; Мы поможем в написании вашей работы!