КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Контор детали, 2 - траектория движения центра инструмента
|
|
|
|
Относительно контура обрабатываемой детали траектория движения центра инструмента при обработке может располагаться по-разному: совпадать с контуром, быть эквидистантной контуру, изменять положение относительно контура по определенному закону. Для полной обработки детали (для выполнения заданной операции)
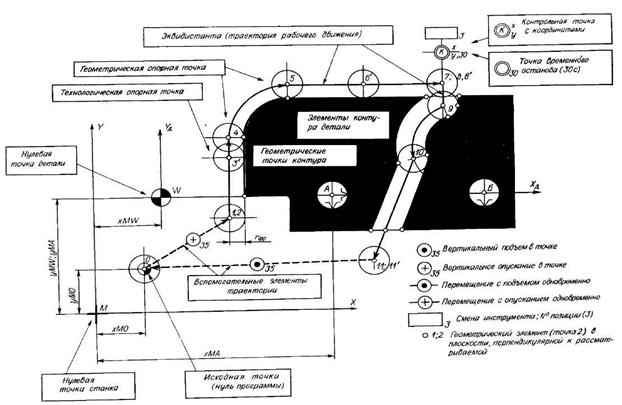
Рис. 14.2. Элементы'траектории инструмента при программированной обработке
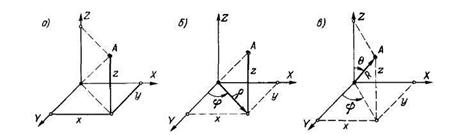
Рис. 14.3. Системы координат: а - прямоугольная; б - цилиндрическая; в - сферическая
траектория движения центра инструмента должна быть непрерывной. Разработать (определить) ее сразу как единое целое практически очень трудно, поскольку в общем случае программируемая траектория является достаточно сложной, определяющей перемещения центра инструмента в пространстве. Поэтому в практике программирования траекторию инструмента представляют состоящей из отдельных, последовательно переходящих друг в друга участков, причем эти участки могут быть или участками
контура детали, или участками эквидистанты.
В общем случае участки траектории движения центра инструмента и траекторию в целом удобно представить графически, исходя из зафиксированного определенным образом положения контура обрабатываемой детали (рис. 14.2).
Отдельные участки контура детали и эквидистанты называются геометрическими элементами. К ним относятся отрезки прямых, дуги окружностей, кривые второго и высших порядков. Точки пересечения элементов или перехода одного элемента в другой находят как геометрические опорные (узловые) точки. Эти точки в большинстве случаев являются определяющими при задании положения элементов контура (эквидистанты) в пространстве. Это положение, так же как и величина и направление движения инструмента, задается в системе координат с определенной заданной нулевой точкой. Такая точка может быть у станка - нулевая точка станка (нуль станка) или у детали — нулевая точка детали (нуль детали). Она является началом системы координат данной детали.
Нуль детали W (см. рис. 14.2) может быть задан относительно нуля станка М соответствующими координатами xMW, yMW1. Свою систему координат имеет инструмент, приспособление. Естественно, что при программировании следует учитывать взаимосвязь всех систем координат.
В системе координат станка координатами хМО и уМО может быть задана исходная точка О, которая используется для начала работы по программе. Обычно с этой точкой перед началом работы совмещают центр инструмента.
В станках с ЧПУ наиболее употребительны прямоугольные (декартовы), цилиндрические и сферические системы координат (рис. 14.3).
В прямоугольной системе координатами некоторой точки А называются взятые с определенным знаком расстояния х, у и z от этой точки до трех взаимно перпендикулярных координатных плоскостей. Точка пересечения координатных плоскостей называется началом_координат а координаты х, у, z - соответственно абсциссой, ординатой и аппликатой.
 В цилиндрической системе координат положение точки в пространстве задается полярными координатами: радиусом ρ и центральным углом φ (положение проекции точки на основной плоскости), а также аппликатой z - расстоянием от точки до основной плоскости.
В цилиндрической системе координат положение точки в пространстве задается полярными координатами: радиусом ρ и центральным углом φ (положение проекции точки на основной плоскости), а также аппликатой z - расстоянием от точки до основной плоскости.
В сферической системе координат точка задается длиной радиус-вектора R, долготой ψ и полярным углом θ.
Переход из одной системы координат в другую осуществляется путем несложного пересчета.
Таким образом, в определенной системе координат контур детали и траектория перемещения центра инструмента относительно этого контура могут быть представлены геометрическими элементами с опорными точками, заданными координатами или в пространстве, или на плоскости (рис. 14.4).
На траектории движения центра инструмента могут быть назначены также технологические опорные точки, т. е. точки, где изменяются какие-то технологические параметры, например подача инструмента и др., точки временного останова с указанием времени останова и т. д. (см. рис. 14.2).
Рис. 14.4. Схема определения При обработке детали инструмент может
координат опорных точек перемещаться или в одной плоскости - плоская
контура детали (а) и обработка при которой используются две управляемые
траектории движения центра координаты, или иметь сложное перемещение в
инструмента (б) пространстве - объемная обработка. Однако чаще всего
объемные поверхности деталей обрабатывают строчками, каждая из которых является плоской кривой.
1 (Координаты в общем виде задаются совокупностью трех символов символа оси (например, х), обозначения исходной точки (например, М) и обозначения конечной точки (например, W).
Опорные точки на траектории движения инструмент позволяют представить эту траекторию как определенную последовательность точек, проходимых центром
инструмента (см. рис. 14.2) при обработке детали. Каждое из положений (каждая
опорная точка) в выбранной системе координат может быть определено числами,
например координатами. Сочетание таких чисел, определяющих ряд последовательных положений инструмента, или, иначе, ряд опорных точек траектории, и будет представлять основную часть программы работы станка, выраженную в числовом виде (см. рис 14.4) в другую осуществляется путем несложного пересчета.
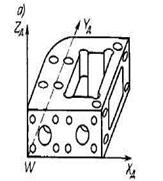
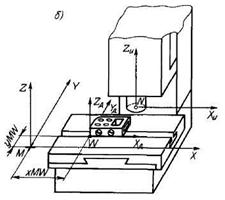
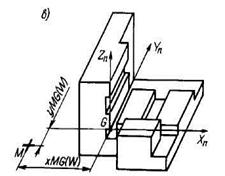
Рис. 14.5. Схема расположения детали на станке:
а - деталь в системе координат_детали; б - размещение детали на станке; в - система координат
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 3088; Нарушение авторских прав?; Мы поможем в написании вашей работы!