КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Устройство промышленного робота
Классификация промышленных роботов
Назначение и область применения
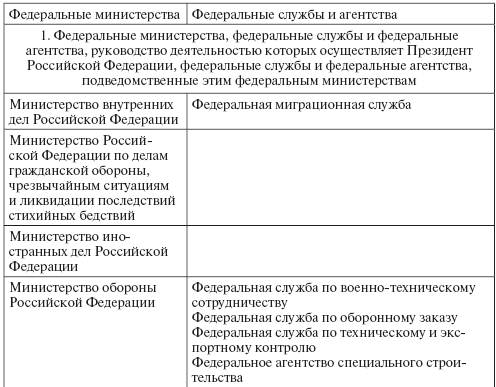
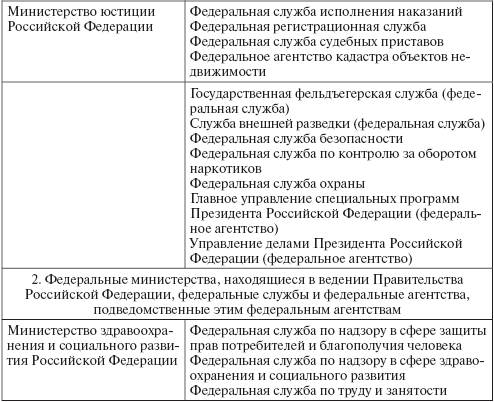
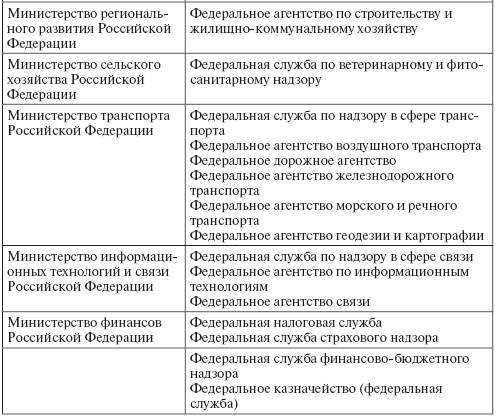
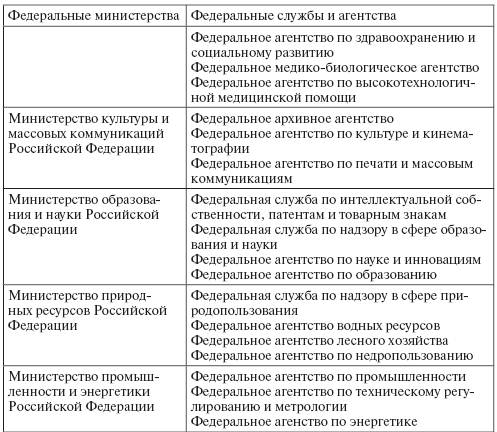
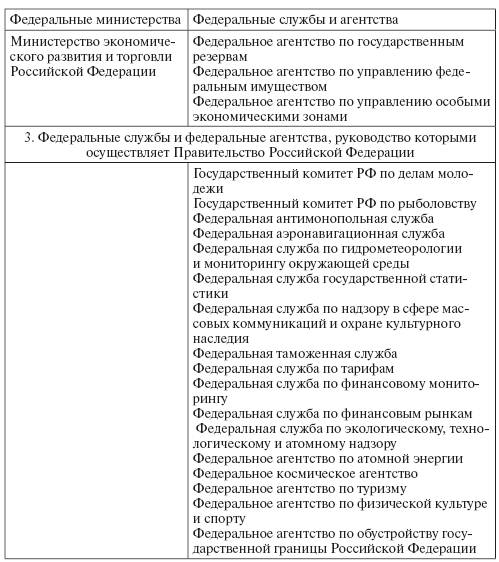
Структура федеральных органов исполнительной власти

Промышленные роботы предназначены для замены человека при выполнении основных и вспомогательных технологических операций в процессе промышленного производства.
При внедрении промышленных роботов решается важная социальная задача: освобождение человека от работ, связанных с опасностями для здоровья или с тяжелым физическим трудом, а также от освобождения человека от простых монотонных операций, не требующих высокой квалификации.
Копирующие манипуляторы, управляемые человеком-оператором необходимы при выполнении различных работ с радиоактивными материалами; при выполнении работ в космосе, под водой, в химически активных средах.
Манипуляторы и промышленные роботы применяются во вредных условиях производства: сварка, окраска, дробеструйная обработка, при покрытии деталей на операциях гальваники и при сортировке и транспортировании тяжелых деталей, на сборочных операциях.
Промышленные роботы классифицируются по следующим признакам:
1) По характеру выполняемых технологических операций;
а) основные;
б) вспомогательные;
в) универсальные;
2) По виду производства;
а) литейные;
б) сварочные;
в) кузнечно-прессовые;
г) для механической обработки;
д) сборочные;
е) окрасочные;
ж) транспортно-складские;
3) По системе координат руки манипулятора;
а) прямоугольная;
б) цилиндрическая;
в) сферическая;
г) сферическая угловая (ангулярная);
д) другие (полярная, пространственная);
4) По числу подвижностей манипулятора;
от двух до шести;
5) По грузоподъемности;
а) сверхлегкие (до 10 Н);
б) легкие (до 100 Н);средние (до 2000 Н);
в) тяжелые (до 10000 Н);
г) сверхтяжелые (свыше 10000 Н);
6) По типу силового привода;
а) электромеханические;
б) пневматические;
в) гидравлические;
г) комбинированные;
7) По степени подвижности основания;
а) мобильные;
б) стационарные;
8) По виду программы;
а) с тяжелой программой;
б) перепрограммируемые;
в) адаптивные;
г) с элементами искусственного интеллекта;
9) По характеру программирования;
а) позиционные;
б) контурные;
в) комбинированные.
Рисунок 20 – Структурная схема промышленного робота с трехподвижным манипулятором
Манипулятор промышленного робота по своему функциональному назначению должен обеспечивать движение выходного звена и закрепленного в нем объекта манипулирования в пространстве по заданной траектории и с заданной ориентацией.
Для выполнения этого требования основной рычажный механизм манипулятора должен иметь не менее шести подвижностей, причем движения по каждой из них должно быть управляемым.
Наиболее простые манипуляторы имеют две и три степени подвижности. Основной механизм руки манипулятора состоит из неподвижного звена – 0 и трех подвижных звеньев – 1,2,3. Механизм этого манипулятора соответствует цилиндрической системе координат.
В этой системе звено – 1 может вращаться относительно звена – 0 (относительное угловое перемещение j10), звено – 2 перемещается по вертикали относительно звена – 1 (относительное линейное перемещение S21), звено – 3 перемещается в горизонтальной плоскости относительно звена – 2 (относительное линейное перемещение S32).
На звене – 3 закреплено захватное устройство или схват, который предназначен для захвата и удержания объекта манипулирования и ориентации в пространстве.
Звенья основного рычажного механизма (манипулятора) образуют между собой три одноподвижных кинематических пары (одну вращательную – А и две поступательные – В и С) и могут обеспечивать перемещение объекта в пространстве без управления его ориентацией.
|
|
Дата добавления: 2013-12-12; Просмотров: 515; Нарушение авторских прав?; Мы поможем в написании вашей работы!