КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Сходящихся сил
|
|
|
|
Способы нахождения равнодействующей системы
Система сходящихся сил.
Система сил, линии действия которых пересекаются в одной точке, называется системой сходящихся сил.
Система сходящихся сил либо приводится к равнодействующей, либо находится в равновесии.
Теорема. Равнодействующая системы сходящихся сил равна векторной сумме этих сил.
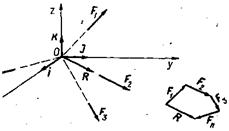
Действительно, пусть к абсолютно твердому телу приложена система сил F1, F2,..., Fn, линии действия которых пересекаются в некоторой точке О (рис. 9). Мы могли бы складывать последовательно эти силы по аксиоме о параллелограмме сил. Однако этот путь очень длинен. Пользуясь правилом геометрического сложения векторов, сразу построим многоугольник сил F1, F2,..., Fn, замыкающая сторона которого и будет равнодействующей силой R.
Изложенный способ определения равнодействующей является геометрическим. Однако равнодействующую силу R можно определить и аналитически, по проекциям на неподвижные оси декартовой системы координат, выбрав за начало координат точку О пересечения линий действия системы сходящихся сил.
Равновесие системы сходящихся сил.
Условия равновесия системы сходящихся сил
Если система сходящихся сил находится в равновесии, механическим условием равновесия является равенство нулю равнодействующей силы. Получим
или R = 0

Так как векторная сумма сил равна нулю, то многоугольник сил является замкнутым (начало первого вектора силы и конец последнего совпадают).
Таким образом, при равновесии системы сходящихся сил многоугольник сил является замкнутым (условие равновесия в геометрической или графической форме).
В аналитической форме условия равновесия системы сходящихся сил заключаются в следующем.
Если пространственная система сходящихся сил находится в равновесии, то алгебраическая сумма проекций этих сил на каждую из трех координатных осей должна равняться нулю (на две оси, если система сходящихся сил расположена на плоскости).
Поскольку в случае равновесия указанной системы сил их равнодействующая равна нулю (R = 0), то равны нулю и ее проекции на оси координат, т. е. Rх = 0, Rу = 0, Rг = 0. На основании (1.10) получим



Для плоской сходящейся системы сил имеем



Условия (1.13) и (1.14) в аналитической форме называются также уравнениями равновесия. Для статической определенности задачи число неизвестных не должно превышать числа уравнений равновесия.
 |
Момент силы относительно точки и оси. Главный вектор и главный момент. Пара сил. Момент силы относительно точки
Моментом силы относительно точки называется векторное произведение радиус-вектора точки приложения силы на силу. Итак, по определению (рис. 12),
Обозначая длину перпендикуляра, опущенного из центра момента на линию действия силы, через h (величину h в дальнейшем будем называть плечом), можно модуль вектора Мо (F) представить в виде произведения Fh, т. е.
| М0(F) | =М0(F) = Fh.
Таким образом, момент силы относительно точки — это вектор, направленный перпендикулярно к плоскости, содержащей силу и точку, в ту часть пространства,.
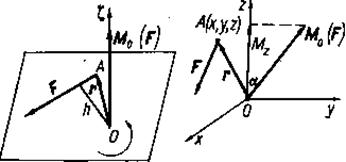
Для аналитического определения момента силы относительно точки выберем произвольную систему координат Оxyz с началом в точке О (рис. 13) и обозначим проекции радиуса-вектора г и силы F на координатные оси Оx, ОY, Оz, соответственно через х, у, z и X, У, Z. Заметим, что проекции х, у, z радиуса-вектора г точки приложения силы одновременно означают координаты этой точки. Тогда, спроектировав обе части векторного равенства (1.15) на оси координат, получим выражение момента силы относительно точки в аналитической форме в виде трех его проекций на координатные оси:

 ,
,
 .
.
Теорема о моменте равнодействующей системы
сходящихся сил (теорема Вариньона)
Момент силы относительно оси
Моментом силы относительно оси называется проекция на ату ось момента силы относительно произвольной точки на оси. Момент силы F относительно оси Оz обозначается через Мz (F). Таким образом,
М
Момент силы относительно оси, как будет показано в динамике, является физической величиной, характеризующей вращательное движение твердого тела.
Согласно определению, моменты силы относительно координатных осей выражаются величинами (1.18), т. е. соответственно равны проекциям
М МУ(F) = zХ -хZ; М
МУ(F) = zХ -хZ; М
Укажем практический способ определения момента силы относительно оси.
|
|
|
|
|
Дата добавления: 2013-12-12; Просмотров: 557; Нарушение авторских прав?; Мы поможем в написании вашей работы!