КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция №6. Кибернетический подход к описанию систем
|
|
|
|
Управление как процесс. Кибернетический подход к описанию систем состоит в том, что всякое целенаправленное поведение рассматривается как управление. Управление — в широком, кибернетическом смысле — это обобщение приемов и методов, накопленных разными науками об управлении искусственными объектами и живыми организмами. Язык управления — это использование понятий «объект», «среда», «обратная связь», «алгоритм» и т.д.




















 Под управлением будем понимать процесс организации такого целенаправленного воздействия на некоторую часть среды, называемую объектом управления, в результате которого удовлетворяются потреб ности субъекта, взаимодейст вующего с этим объектом.
Под управлением будем понимать процесс организации такого целенаправленного воздействия на некоторую часть среды, называемую объектом управления, в результате которого удовлетворяются потреб ности субъекта, взаимодейст вующего с этим объектом.
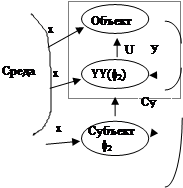
рис. 2.1. Кибернетический подход кпроцессу управления
Анализ управления заставляет выделить тройку — среду, объект и субъект, внутри которой разыгрывается процесс управления (рис. 2.1). В данном случае  субъект ощущает на себе воздействие среды Х и объекта У. Если состояние среды Х он изменить не может, то состоянием объекта У он может управлять с помощью специально организованного воздействия U. Это и есть управление.
субъект ощущает на себе воздействие среды Х и объекта У. Если состояние среды Х он изменить не может, то состоянием объекта У он может управлять с помощью специально организованного воздействия U. Это и есть управление.
Состояние объекта Y влияет на состояние потребностей субъекта. Потребности субъекта  где
где  — состояние i-й потребности субъекта, которая выражается неотрицательным числом, характеризующим насущность, актуальность этой потребности. Свое поведение субъект строит так, чтобы минимизировать насущность своих потребностей, т. е. решает задачу многокритериальной оптимизации:
— состояние i-й потребности субъекта, которая выражается неотрицательным числом, характеризующим насущность, актуальность этой потребности. Свое поведение субъект строит так, чтобы минимизировать насущность своих потребностей, т. е. решает задачу многокритериальной оптимизации:
 (2.1)
(2.1)
где R — ресурсы субъекта. Эта зависимость выражает неизвестную, но существующую связь потребностей с состоянием среды Х и поведением U субъекта.
Пусть  —решение задачи (2.1), т. е. оптимальное поведение субъекта, минимизирующее его потребности А. Способ решения задачи (2.1), позволяющий определить , называется алгоритмом управления
—решение задачи (2.1), т. е. оптимальное поведение субъекта, минимизирующее его потребности А. Способ решения задачи (2.1), позволяющий определить , называется алгоритмом управления
 (2.2)
(2.2)
где j — алгоритм, позволяющий синтезировать управление по состоянию среды Х и потребностей Аt,. Потребности субъекта изменяются не только под влиянием среды или объекта, но и самостоятельно, отражая жизнедеятельность субъекта, что отмечается индексом t.
Алгоритм управления j, которым располагает субъект, и определяет эффективность его функционирования в данной среде. Алгоритм имеет рекуррентный характер:
 ,
,
т. е. позволяет на каждом шаге улучшать управление. Например, в смысле
 ,
,
т. е. уменьшения уровня своих потребностей.
Процесс управления как организация целенаправленного воздействия на объект может реализовываться как на интуитивном,так и на осознанном уровне. Первый используют животные, второй — человек. Осознанное удовлетворение потребностей заставляет декомпозировать алгоритм управления и вводить промежуточную стадию — формулировку цели управления, т. е. действовать по двухэтапной схеме:
 |  |
На первом этапе определяется цель управления  , причем задача решается на интуитивном уровне:
, причем задача решается на интуитивном уровне:
 ,
,
где j1 — алгоритм синтеза цели Z* по потребностям Аt и состоянию среды X. На втором этапе определяется управление , реализация которого обеспечивает достижение цели 2.*, сформированной на первой стадии, что и приводит к удовлетворению потребностей субъекта. Именно на этой стадии может быть использована вся мощь формального аппарата, с помощью которого по цели Z* синтезируется управление
где j2 — алгоритм управления. Этот алгоритм и есть предмет изучения кибернетики как науки.
Таким образом, разделение процесса управления на два этапа отражает известные стороны науки — неформальный, интуитивный, экспертный и формальный, алгоритмизуемый. Если первая
 | |||||
 | |||||
 | |||||
Ряс. 2.2. Взаимодействие Рис. 2.3. Структурная схема
элементов системы управления. системы управления
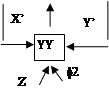
пока полностью принадлежит человеку, то вторая является объектом приложения формальных подходов. Естественно, что эти различные функции выполняются разными структурными элементами. Первую функцию (, выполняет субъект, а вторую ( — управляющее устройство (УУ). На рис. 2.2 показано взаимодействие этих элементов. Штриховой линией выделена система управления (СУ), выполняющая функцию реализации целей управления 2*, формируемых субъектом.
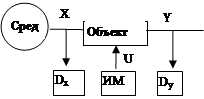
Системы управления сложный объект управления •. Структурная схема СУ приведена на рис. 2.3. Здесь Dx и Dy — датчики, измеряющие состояние среды и объекта соответственно. Результаты измерений Х'=Dx(Х) и У'=Dy(У) образуют исходную информацию ]= {X', У'} для УУ, которое на этой основе вырабатывает команду управления и, являющуюся лишь информациейо том, в какое положение должны быть приведены управляемыевходы объекта. Следовательно, управление (/ есть результатработы алгоритма
 .
.
Как видно, управление в широком смысле образуется четверкой
{ .}
.}
В качестве примера рассмотрим основные понятия управления в технических и организационных системах.
Управление — целенаправленная организация того или иного процесса, протекающего в системе. В общем случае процесс управления состоит из следующих четырех элементов:
n получение информации о задачах управления (Z*),
n получение информации о результатах управления (т. е. о поведении объекта управления У’);
n анализ полученной информации и выработка решения (J=={х'. У'}),
n исполнение решения (т. е. осуществление управляющих воз-
действий и').
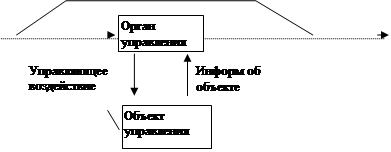
Процесс управления — это информационный процесс (рис.2.4), заключающийся в сборе информации о ходе процесса, передаче ее в пункты накопления и переработки, анализе поступающей, накопленной и справочной информации, принятии решения на основе выполненного анализа, выработке соответствующего управляющего воздействия и доведении его до объекта управления. Каждая фаза процесса управления протекает во взаимодействии с окружающей средой при воздействии различного рода помех. Цели, принципы и границы управления зависят от сущности решаемой задачи.
Система управления — совокупность взаимодействующих между собой объекта управления и органа управления, деятельность которых направлена заданной цели управления (рис2.5).
 Итрормациснная связь с АСУ Полее Высокого уровня
Итрормациснная связь с АСУ Полее Высокого уровня



 +
+
 | |||||||
 | |||||||
| |||||||
| |||||||
Рис. 2.4. Процесс управления как информационные процесс
(рис. 2.5). В СУ решаются четыре основные задачи управления: стабилизация, выполнение программы, слежение, оптимизация.
Задачами стабилизации системы являются задачи поддержания ее выходных величин вблизи некоторых неизменных заданных значений, несмотря на действие помех. Например, стабилизация напряжения U и частоты f тока в сети вне зависимости от изменения потребления энергии.
Задача выполнения программы возникает в случаях, когда заданные значения управляемых величин изменяются во времени заранее известным образом.
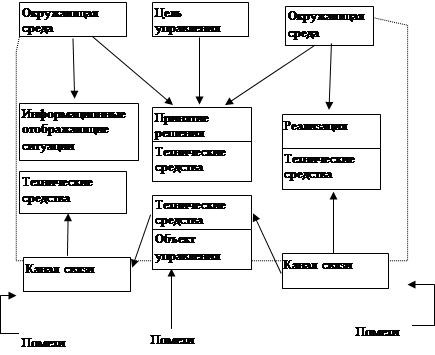
Рис. 2.5. Системы управления как совокупность объектов
В системах оптимального управления требуется наилучшим образом выполнить поставленную перед системой задачу при заданных реальных условиях и ограничениях. Понятие оптимальности должно быть конкретизировано для каждого отдельного случая.
Прежде чем принимать решение о создании СУ, необходимо рассмотреть все его этапы, независимо от того, с помощью каких технических средств они будут реализованы. Такой алгоритмический анализ управления является основой для принятия решения о создании СУ и степени ее автоматизации. При этом анализе следует обязательно учитывать фактор сложности объекта управления:
n отсутствие математического описания системы;
n стохастичность поведения;
n негативность к управлению;
n не стационарность, дрейф характеристик;
n невоспроизводимость экспериментов (развивающаяся система все время как бы перестает быть сама собой, что предъявляет специальные требования к синтезу и коррекции модели объекта управления).
Особенности сложной системы часто приводят к тому, что цель управления таким объектом в полной мере никогда не достигается, как бы совершенно ни было управление.
Системы управления делятся на два больших класса: системы автоматического управления (САУ) и автоматизированные системы управления (АСУ). В САУ управление объектом или системой осуществляется без непосредственного участия человека автоматическими устройствами. Это замкнутые системы. Основные функции САУ: автоматический контроль и измерения, автоматическая сигнализация, автоматическая защита, автоматические пуск и остановка различных двигателей и приводов, автоматическое поддержание заданных режимов работы оборудования, автоматическое регулирование. В отличие от САУ в АСУ в контур управления включен человек, на которого возлагаются функции принятия наиболее важных
решений и ответственности за принятые решения. Под АСУ обычно понимают человеко-машинные системы, использующие
современные экономико-математические методы, средства электронно-вычислительной техники(ЭВТ) и связи, а также новые организационные принципы для отыскания и реализации на практике наиболее эффективного управления объектом(системой).
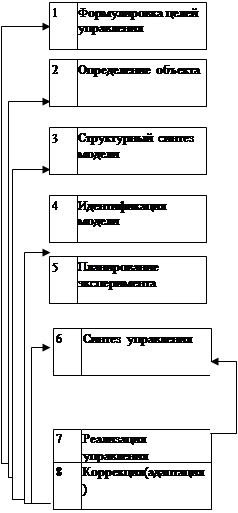
Этапы управления. Управление сложной системы состоит из этапов, представленных на рис.2.6.
1. Формирование цепей. Множество целей управления, которое должно реализовать СУ определяется как внешними по отношению к системе, так и внутренними факторами и, в частности, потребностям субъекта А. Сложность формализации учета влияния на цели очевидна. Различают три вида целей: стабилизация— заключается в требовании поддерживать выходы объекта на заданном уровне; ограничение — требует нахождения в заданных границах целевых переменных  ; экстремальная цель—сводится к поддержанию в экстремальном состоянии целевых переменных
; экстремальная цель—сводится к поддержанию в экстремальном состоянии целевых переменных  .
.
2. Определение объекта управления. Этот этап связан с выделением той части среды субъекта, состояние которой он может изменить и тем самым воздействовать на свои потребности. В ряде случаев, когда границы объекта очевидны, проблемы выделения объекта из среды не возникает. Это бывает, когда объект достаточно автономен (самолет, телефонная станция и т. д.). Однако в других случаях связи объекта со средой настолько сильны и разнообразны, что порой очень трудно понять, где кончается объект и начинается среда. Именно это и заставляет вводить специальный этап — определение объекта управления. Объект должен быть в определенном смысле минимальным, т. е. иметь наименьший объем. Это необходимо с целью минимизации трудоемкости его изучения при синтезе модели. При этом существенным ограничением выступает достижимость множества целей управления {Z*} в рамках выделенного для этого ресурса R. Это означает, что для любого состояния среды Х должно найтись управление  , с помощью которого можно добиться любой допустимой цели
, с помощью которого можно добиться любой допустимой цели 
3. Структурный синтез модели. Последующие три этапа управления сложными системами связаны с решением задачи создания ее модели, которая нужна для синтеза управления U. Только с помощью модели объекта можно построить управление U*, переводящее объект в требуемое (целевое) состояние Z*. Модель F, связывающая входы Х и U с выходом У, определяется структурой SТ и параметрами С={с1...,ck}, т. е. представима в виде двойки F={SТ, С). На этом этапе определяется структура SТ, т. е. модель объекта с точностью до значений ее параметров С. Этап структурного синтеза включает: определение внешней структуры модели, декомпозицию модели, определение внутренней структуры элементов модели. Синтез внешней структуры сводится к содержательному определению входов Х и U, выхода У без учета внутренней структуры объекта, т. е. объект рассматривается как некий «черный ящик» с n+q входами и m выходами. Декомпозиция модели заключается в том, чтобы, воспользовавшись априорными сведениями о структуре объекта, упростить задачу синтеза структуры модели. Синтез структуры модели сводится к определению вида оператора F модели объекта с точностью до параметров С. Это значит, что параметры становятся переменными модели, т. е.
 (2.3)
(2.3)
где F — оператор преобразования структуры SТ, параметры которого для удобства внесены в переменные С. Представление оператора преобразования модели в виде (2.3) можно назвать параметризацией модели, что эквивалентно заданию его структуры. При синтезе структуры моделей объектов управления могут применяться различные подходы — от классических методов теории автоматического управления (ТАУ) до современных методов имитационного моделирования (методы случайного поиска, статистических испытаний и др.), семиотического моделирования с использованием языка бинарных отношений и других методов современной математики, использующих сочетание дополняющих друг друга возможностей аналитических и статистических, семиотических и графических и других формализованных представлений системы.
4. Идентификация параметров модели объекта. Этот этап связан с определением числовых значений параметров С в режиме нормального функционирования объекта. Делается это стандартными приемами идентификации. Для выяснения зависимости выхода объекта от управляемых входов (U необходимо преднамеренно их изменять, т. е. экспериментировать с объектом. Однако сложная система «не любит» эксперименты, нарушающие режим ее нормального функционирования. Поэтому эксперимент, которого нельзя набежать, следует проводить, минимально возмущая объект, но так, чтобы получить при этом максимальную информацию о влиянии варьируемых параметров на выход объекта.
5. Планирование эксперимента. На данном этане главным является синтез плана эксперимента, позволяющего с максимальной эффективностью определить искомые параметры модели объекта управления. Для статического объекта этот план {U представляет собой набор состояний управляемого выхода объекта U={U1..., Un}, а для динамического — план-функцию 0<=t<=T, т. е. программу изменения во времени входа объекта. Эксперимент на объекте дает возможность определить реакцию объекта на это воздействие. В статическом случае эта реакция имеет вид Y={y1,..., yn), где , а в динамическом — У(1)= ^{и(1)}. Полученная информация и является исходной для определения параметров модели F: У=F(U, С), что осуществляется методами идентификации. План эксперимента 0 определяется: структурой SТ модели F, ресурсом планирования R, который образуется выделяемыми на эксперимент средствами, областью планирования, определяющей пределы изменения входа U; критерием планирования, который определяет эффективность плана U.
, а в динамическом — У(1)= ^{и(1)}. Полученная информация и является исходной для определения параметров модели F: У=F(U, С), что осуществляется методами идентификации. План эксперимента 0 определяется: структурой SТ модели F, ресурсом планирования R, который образуется выделяемыми на эксперимент средствами, областью планирования, определяющей пределы изменения входа U; критерием планирования, который определяет эффективность плана U.
6. Синтез управления. На этом этапе принимается решение о том, каково должно быть управление (U, чтобы достигнуть заданной цели управления Z* в объекте. Это решение опирается на имеющуюся модель объекта F, заданную цель Z*, полученную информацию о состоянии среды Х и выделенный ресурс управления R, который представляет собой ограничения, накладываемые на управление (U в связи со спецификой объекта и возможностями СУ. Достижение цели Z* возможно соответствующим выбором управления U (состояние среды Х изменяется независимо от нас). Это приводит к экстремальной задаче


решение которой U* является оптимальным управлением. Способы решения задачи (2.4) существенно зависят от структуры модели объекта F. Если объект статический, т. е. F— функция, то получаем задачу математического программирования, если же —динамический, т. е. F— оператор, то решают вариационную задачу.
7. Реализация управления или отработка в объекте оптимального решения U*, полученного на предыдущем этапе. Реализовав управление и убедившись, что цель управления не достигнута, возвращаются к одному из предыдущих этапов. Даже в лучшем случае, когда поставленная цель достигнута, необходимость обращения к предыдущему этапу вызывается изменением состояния среды Х или сменой цели управления U*.
Таким образом, при благоприятном стечении обстоятельств обращаются к этапу синтеза управления (стрелка а на рис. 2.6), где определяется новое состояние, которое отражает новую ситуацию, сложившуюся в среде. Так функционирует стандартный контур управления простым объектом.
8. Адаптация. Специфика управления сложной системой состоит в том, что благодаря зашумленности и нестационарности информация, полученная на предыдущих этапах, приближенно отражает состояние системы лишь в предыдущие моменты времени. Это и вызывает необходимость коррекции. Коррекция может затрагивать различные этапы.
Простейшая коррекция связана с подстройкой параметров модели С (стрелка с, рис. 2.6). Такого рода коррекцию называют адаптацией модели, а управление — адаптивным управлением. Если управление U не обеспечивает необходимого разнообразия входа объекта для эффективной коррекции параметров модели, то приходится принимать специальные меры планирования эксперимента путем добавления специальных тестовых сигналов (стрелка Ь, рис. 2.6). Такое управление называют дуальным. Однако одной коррекции параметров модели может оказаться недостаточно, если изменилась ее структура. Поэтому время от времени необходима коррекция структуры модели, т. е. приведение ее в соответствие с новой информацией (стрелка d, рис. 2.6).
Далее коррекция может коснуться самого объекта, точнее, границы разделения объекта и среды. Это бывает необходимо призначительном изменении (эволюции) объекта и окружающей ее среды (стрелка е, рис. 2.6). И наконец, созданная СУ по ряду причин может не реализовать все множество целей управления, в результате необходима адаптация целей (стрелка g, рис. 2.6).
Очевидно, что не все из описанных выше восьми этапов управления присутствуют при синтезе СУ. В ряде случаев некоторые из них выпадают. Например, объект управления может быть выделен из среды и тогда нет необходимости в этапе планирования эксперимента, так как модель объекта проста и все ее параметры можно определить без специально организованного эксперимента.
Оглавление
Введение. Основные понятия и определения................................................................................................. 1
Основные задачи теории систем.................................................................................................................. 1
Краткая историческая справка...................................................................................................................... 3
ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ СИСТЕМ............................................................................................. 7
Основные понятия и определения................................................................................................................... 12
Основное содержание первой лекции........................................................................................................ 12
Понятие информации..................................................................................................................................... 13
Открытые и закрытые системы.................................................................................................................... 13
Модель и цель системы................................................................................................................................. 14
Управление....................................................................................................................................................... 14
Информационные динамические системы.............................................................................................. 14
Классификация и основные свойства единиц информации............................................................... 15
Системы управления..................................................................................................................................... 16
Реляционная модель данных....................................................................................................................... 17
Виды информационных систем...................................................................................................................... 19
Классификация информационных систем............................................................................................... 19
Технические, биологические и др. системы............................................................................................ 19
Детерминированные и стохастические системы................................................................................... 19
Открытые и закрытые системы................................................................................................................... 20
Хорошо и плохо организованные системы............................................................................................. 20
Классификация систем по сложности...................................................................................................... 22
Лекция №4. Закономерности систем.............................................................................................................. 26
Целостность..................................................................................................................................................... 26
Интегративность.............................................................................................................................................. 27
Коммуникативность........................................................................................................................................ 27
Эквифинальность............................................................................................................................................. 28
Закон необходимого разнообразия............................................................................................................ 29
Закономерность осуществимости и потенциальной эффективности систем................................. 29
Закономерность целеобразования............................................................................................................. 30
Системный подход и системный анализ................................................................................................... 31
Лекция №5. Уровни представления информационных систем............................................................... 35
Методы и модели описания систем............................................................................................................ 35
Качественные методы описания систем................................................................................................... 35
Количественные методы описания систем............................................................................................. 42
Лекция №6. Кибернетический подход к описанию систем...................................................................... 48
Лекция №8. Теоретико-множественное описание систем........................................................................ 85
Предположения о характере функционирования систем................................................................... 85
Система, как отношение на абстрактных множествах........................................................................ 86
Временные, алгебраические и функциональные системы................................................................... 88
Временные системы в терминах «ВХОД — ВЫХОД».......................................................................... 90
Лекция №10. Динамическое описание систем.......................................................................................... 104
Детерминированная система без последствий..................................................................................... 105
Детерминированные системы без последствия с входными сигналами двух классов............ 106
Учет специфики воздействий............................................................................................................................. 106
Детерминированные системы с последствием..................................................................................... 107
Стохастические системы........................................................................................................................... 107
Агрегатное описание систем......................................................................................................................... 108
Лекция №7. Алгоритмы на топологических моделях.
Алгоритмы на топологических моделях. Представление графов в ЭВМ. Матрицы смежности, изоморфности, достижимости и контрдостижимости, списочные формы. Алгоритмы на графах. Алгоритмы поиска путей, выделения контуров, поиск касающихся контуров.
6.1. Задачи анализа топологии
Под топологическим анализом понимается выявление структурных свойств и особенностей модели на основании исследования моделей первого ранга неопределенности Ms(1), т.е. на основании информации о взаимосвязи переменных графа.
К основным задачам анализа топологии, относятся задачи поиска путей, выделения контуров, декомпозиции на подсистемы.
Алгоритмы для такого анализа на основании представлений моделей в форме графов или матричной форме неоднократно приводились в литературе [6, 28, 107]. Традиционные постановки касаются в основном линейных систем, составленных из однонаправленных элементов.
Алгоритмы топологического анализа имеют огромное значение для исследования СС НСУ с помощью ЭВМ, так как проблема повышения эффективности по быстродействию и точности существующих методов моделирования может быть решена за счет более полного учета топологических особенностей модели [45, 46, 124, 126].
Пример вычисление передаточных функций системы по формуле Мезона.
Расписать пример.
6.2. Представление информации о топологии моделей
Представление топологии модели возможно в списочной и матричной форме. При организации программных средств чаще используется списочная форма. При больших размерностях одноуровневых сильно разряженных моделей она имеет преимущества по требуемой памяти и скорости работы алгоритмов топологического анализа. Однако для сильно связанных систем небольшой размерности или иерархических систем эффективнее испробовать алгоритмы, основанные на матричных формах, например на матрицах смежности.
В качестве иллюстрации на рис. 1.1. приведена диаграмма графа модели странного аттрактора Лоренца [93]. Эта форма представления позволяет эффективнее решать задачи выделения путей и контуров, связности, структурной управляемости и многие другие, чем в форме НФК и отчасти СНДУ.
Модель системы представляется ориентированным графом H=<G,H> с множеством переменных Х=x1,...., xn, N - общее множество вершин, и множеством дуг G - упорядоченных пар номеров смежных вершин (i,j), G=(i,j)1,... (i,j)n. Общее количество таких пар обозначено в примерах как Q.
Несмотря на всю компактность и удобство такой записи, на практике чаще используют матрицу смежности R = rij, показывающую наличие дуги между i-ой и j-ой вершинами.
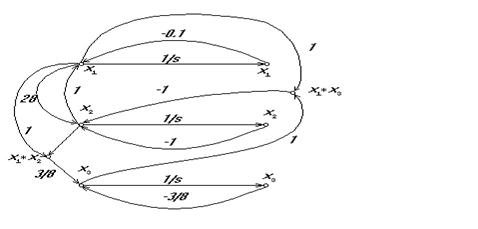
Рис. 2.1. Модель странного аттрактора в форме ориентированного графа
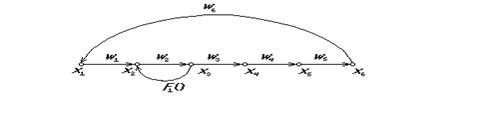
Рис. 2.2. Модель системы в форме графа
Другим способом представления топологии является матрица изоморфности D, в строках которой представлены номера входящих (с плюсом) и выходящих (с минусом) дуг.
Для приведенного на рис. 2.2 примера матрицы смежности и изоморфности имеют вид:
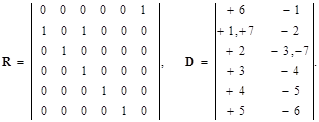
Избыточность хранимой информации в матрице смежности (нулевые значения) компенсируются простотой вычислительных алгоритмов и скоростью получения требуемой информации из матрицы. Кроме того, наличие только двух значений 0 или 1, дает возможность использовать для ее представления битовые поля, что дает значительную экономию памяти, и при размерах системы порядка 100 элементов не уступает по затратам ресурсов на хранение матрицы изоморфности, при значительно более простых алгоритмов обработки информации. Использование матриц смежности, инцидентностей, достижимостей и др. имеет большое применение для алгоритмов топологического анализа СС НСУ [107].
Ориентированные графы (структурные схемы) обычно широко используются при описании линейных систем и систем с одновходовыми нелинейностями. Однако возникают некоторые затруднения при описании нелинейных систем, где нелинейные функции могут зависеть от нескольких переменных, например при описании операций умножения и деления.
6.3. Переборные методы
6.4. Поиск контуров и путей по матрице смежности
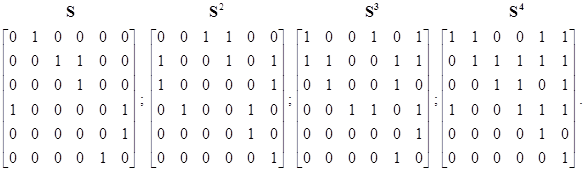
Наиболее простым способом идентификации путей и контуров являются матричные алгоритмы структурного анализа [107]. Они строятся на основе последовательного возведения в соответствующие степени матрицы смежности (см. 1.5).
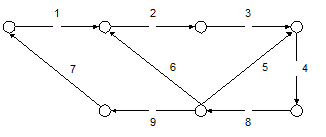
Единица в матрице смежности S говорит о наличии пути между i‑й и j-й вершинами длиной 1. Наличие 1 в (i, j)-й позиции в матрицы  означает путь длиной 2 между этими вершинами, и так далее. Таким образом, существование ненулевого значения на главной диагонали означает наличие пути из данной вершины в данную вершину, длинна которого равна степени матрицы. Значение матрицы смежности в различных степенях для графа, представленного на рис. 3.1 показаны ниже:
означает путь длиной 2 между этими вершинами, и так далее. Таким образом, существование ненулевого значения на главной диагонали означает наличие пути из данной вершины в данную вершину, длинна которого равна степени матрицы. Значение матрицы смежности в различных степенях для графа, представленного на рис. 3.1 показаны ниже:
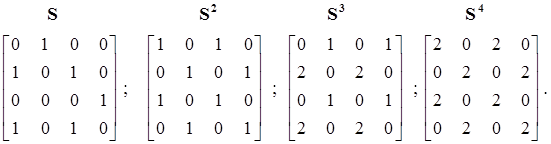
Наличие 1 в главной диагонали указывает на то, что четыре переменные системы входят в контуры длиной 2. Это позволяет определить вершины, входящие в контуры, его длину, но не конкретный вид. Поэтому требуется уточняющий переборный алгоритм на отобранных вершинах нелинейного системного гибридного графа, определяющего конкретный вид контура известной длины. На выходе этого алгоритма формируется дополняемый список из номеров вершин, входящих в каждый контур. С учетом различной длины контуров его удобнее представлять в памяти ПЭВМ динамическим списком
 .
.
Четвертая степень матрицы смежности  содержит информацию об еще одном контуре длиной 4. Но кроме этого повторяется информация о контурах длиной 2.
содержит информацию об еще одном контуре длиной 4. Но кроме этого повторяется информация о контурах длиной 2.
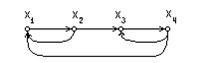
Рис. 3.1. Диаграмма графа одноуровневой модели СУ
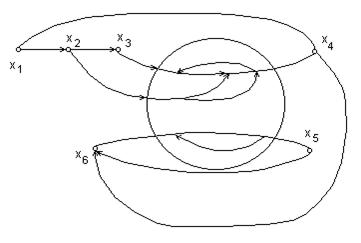
Рис. 3.2. Диаграмма графа иерархической модели СУ
Отмеченные особенности этого метода, повторение информации о контурах в матрицах более высокого порядка, кратного длине контура; трудности в обработки контуров одинаковой длины, требуют применения, в дополнению к рассматриваемому методу переборного алгоритма, уточняющего и отбрасывающего повторяющую информацию.
Наиболее существенным недостатком данного метода является его низкое быстродействие в следствие большого количества возведений матрицы смежности в соответствующие степени и большие затраты памяти ЭВМ для хранения информации.
6.5. Модифицированный алгоритм поиска контуров и путей по матрице смежности
Недостатки алгоритма поиска путей и контуров на основании представления топологии модели в форме матриц смежности, отмеченные выше, могут быть компенсированы, если использовать логические операции вместо математических и побитовое представление матрицы смежности. Быстрый рост необходимой памяти и временных затрат на работу алгоритма с ростом размерности систем в предлагаемом алгоритме компенсируются иерархическим представлением топологии модели а так же иерархическим характером построения алгоритмов топологического анализа.
Реализация алгоритма в этом случае использует не умножение, а логическую операцию И (в матрице присутствуют только значения 0 и 1), выполняемую одной машинной командой.
Как отмечалось ранее, составной характер представляемых моделей требует учета наличия связей между входами и выходами внутри подсистем. С этой целью водится матрица существования связи:
 (3.1)
(3.1)
Пример, иллюстрирующий данную особенность показан на рис. 3.2. При формировании матрицы смежности информация о внутренних контурах подсистемы не учитывается, учитывается только информация матрицы J (3.1) существования связи между входами и выходами подсистемы. Возведение в соответствующие степени матрицы смежности S позволяет выделить для данной системы 3 контура.
Логическая сумма, - операции ИЛИ - позволяет определить все возможные связи между вершинами.
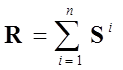 (3.2)
(3.2)
где n - размерность системы и, кроме того, определяет длину максимально возможного пути. Данную сумму называют матрицей достижимости.
Транспонированная матрица достижимости
 , (3.3)
, (3.3)
называемой матрицей контрдостижимостей.
Ниже приведены значения матриц достижимости и контрдостижимости для системы представленной на рис. 3.2.
 .
.
Если в матрице достижимости оставить только входные и выходные вершины подсистемы данного уровня иерархии, то получится матрица связей J (3.1), которая должна быть передана в вышестоящую по уровню систему для составления аналогичных функций структурного анализа и учета этой информации на стадии моделирования.
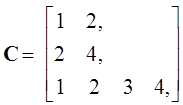
Блок схема, реализующая предлагаемый алгоритм, показана на рис. 3.4. Блок 1 выполняет преобразование из внутренней формы представления нелинейного системного гибридного графа в матрицу смежности размером N * N. Блоки 3 и 4 задают начальные значения матриц контуров С и достижимости R. Блоки 4,5,15 организуют основной цикл. Блок 6 вычисляет i-ю степень матрицы смежности, перемножение выполняется логической операцией “И”. Блок 7 выполняет накопление информации о всех возможных путях в матрице достижимости, суммирование производится логической операцией “ИЛИ”. Блоки 8,9,14 организуют цикл проверки вершин на принадлежность к контурам. В этом цикле перебираются элементы главной диагонали матрицы  . Если вершина j относится к контуру, длиной i (блок 10), то в блоке 11 переборными методами этот контур выделяется. Выделенный контур, в блоке 12, сравнивается с уже существующими, хранящимися в списке контуров С. Если контур новый, то он добавляется к списку (блок 13). После завершения основного цикла, вычисляется матрица контрдостижимости Q (блок 16) и матрица связей в системе (подсистеме) J (блок 17), после чего алгоритм завершает свою работу. Выходными параметрами, возвращаемыми в вызвавшую программу, являются матрицы R, Q, J, C.
. Если вершина j относится к контуру, длиной i (блок 10), то в блоке 11 переборными методами этот контур выделяется. Выделенный контур, в блоке 12, сравнивается с уже существующими, хранящимися в списке контуров С. Если контур новый, то он добавляется к списку (блок 13). После завершения основного цикла, вычисляется матрица контрдостижимости Q (блок 16) и матрица связей в системе (подсистеме) J (блок 17), после чего алгоритм завершает свою работу. Выходными параметрами, возвращаемыми в вызвавшую программу, являются матрицы R, Q, J, C.
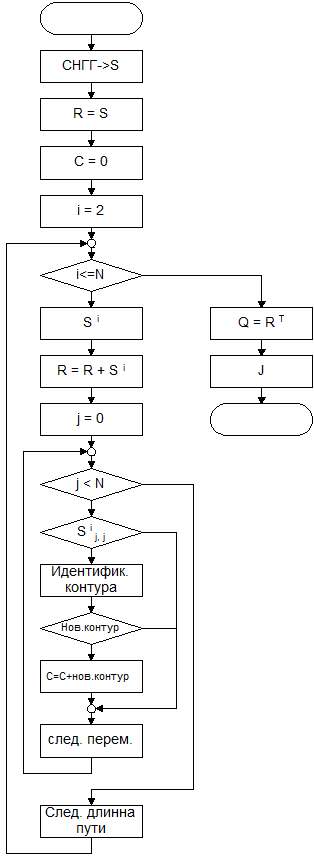
| S= 0 1 0 0 0 0 0 0 1 0 0 0 0 0 0 1 1 0 0 1 0 0 0 1 1 0 0 0 0 1 0 0 0 0 0 0 S 2 = 0 0 1 0 0 0 0 0 0 1 1 0 1 1 0 0 0 1 0 0 1 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 S 3 = 0 0 0 1 1 0 1 1 0 0 0 1 0 1 1 0 0 0 0 0 0 1 1 0 0 0 1 0 0 0 0 0 0 0 0 0 S 4 = 1 1 0 0 0 1 0 1 1 0 0 0 0 0 1 1 1 0 1 1 0 0 0 1 0 0 0 1 1 0 0 0 0 0 0 0 S 5 = 0 1 1 0 0 0 0 0 1 1 1 0 1 1 0 1 1 1 0 1 1 0 0 0 1 1 0 0 0 1 0 0 0 0 0 0 S 6 = 0 0 1 1 1 0 1 1 0 1 1 1 1 1 1 0 0 1 0 0 1 1 1 0 0 1 1 0 0 0 0 0 0 0 0 0 |
Рис. 3.4. Блок-схема и пример работы программы выделения контуров
6.6. Поиск контуров и путей по матрице изоморфности
 6. 5. Диаграмма графа
6. 5. Диаграмма графа
Матрица изоморфности D
| -1 | |||
| -2 | |||
| -3 | |||
| -4 | |||
| -8 | |||
| -5 | -6 | -9 | |
| -7 |
Алгоритм идентификации контуров следующий:
1. Просмотреть строки матрицы. Для i-й строки просмотреть элементы до обнаружения отрицательного элемента Di j <0. Запомнить номер строки и значение элемента Di j.
2. Найти строки в матрице содержащие элемента D k l == - Di j. Для каждой найденной строки выполнить пп. 1, до тех пор пока в найденной последовательности повторно не вертится уже обнаруженная дуга, или программе не удастся обнаружить новую дугу, выходящую из этой вершины.
Пример для графа, представленного на рис. 6.5.
1. В 0-й строке нашел D[0][0]= -1;
2. Нашел D[1][1]= 1;
3. Â 1-é строке нашел новый отрицательный элемент D[1][0] = -2;
4. Нашел D[2][1]= 2;
5. В 2-й строке нашел новый отрицательный элемент D[2][0] = -3;
6. Нашел D[3][0] = 3;
7. Â 3-é строке нашел новый отрицательный элемент D[3][2] = -4;
8. Нашел D[4][0]= 4;
9. Â 4-é строке нашел новые отрицательные элементы D[4][1] = -5, D[4][1] = -6, D[4][1] = -9. Необходимо разветвить поиск;
10. Нашел D[3][1]= 5;
11. Â 3-é строке нашел отрицательный элемент D[3][2] = -4. Этот элемент уже был в цепочки поиска. Поиск по этой ветки прекращен. Возвращаемся в пп.9;
12. Нашел D[1][2]= 6;
13. Â 1-é строке нашел отрицательный элемент D[1][0] = -2. Этот элемент уже был в цепочки поиска. Поиск по этой ветки прекращен. Возвращаемся в пп.9;
14. Нашел D[6][0]= 9;
15. Â 6-é строке нашел новый отрицательный элемент D[6][1] = -7;
16. Нашел D[0][1]= 7;
17. В 0-й строке нашел D[0][0]= -1. Этот элемент уже был в цепочки поиска. Поиск по этой ветки прекращен.
18. Новых отрицательных элементов в матрице не осталось поиск прекращен.
После завершения поиска имеем:
| -1 | -2 | -3 | -4 | -8 | -5 | -4 | ||
| -6 | -2 | |||||||
| -9 | -7 | -1 |
По данным этого списка составляем контура.
Обычно в литературе указывается на высокую эффективность данного алгоритма. Он действительно выглядит очень просто и наглядно. Однако при его реализации придется организовывать разветвление работы алгоритма. Это можно сделать либо через рекурсию, либо организовать запоминание дерева перебора и незавершенные точки перебора. Что приводит к значительным затратам ресурсов ЭВМ, не учитывающихся большинством авторов анализирующих эффективность данного алгоритма.
6.6. Сравнение алгоритмов топологического анализа
К недостаткам представления топологии модели в форме матрицы смежности относят неэффективное использование памяти ЭВМ и низкое быстродействие алгоритмов. В качестве более эффективного способа в работе [107] предлагают матрицы изоморфности.
Неэффективность представления в памяти ЭВМ матрицы смежности обосновывается необходимостью помнить N*N элементов. Для матрицы изоморфности объем информации зависит от максимального числа дуг, входящих и выходящих из каждой вершины. Анализ большинства моделей СС НСУ показывает, что в среднем необходимо помнить 5*N элементов (под средним значением здесь понимается среднее между матричной формой записи и среднем значением, получающимся при описании информации о топологии системы в форме динамического списка, с учетом выделения служебных полей этого списка для организации ссылок). Но в матрице смежности необходимо помнить только значения 0 или 1 и, соответственно, достаточно представить эту матрицу битовыми полями, в то время как для матрицы изоморфности понадобятся целые числа, занимающие в памяти ЭВМ 2 байта или 16 бит.
В результате для представления матрицы смежности будет необходимо N*N/8 байт, а для матрицы изоморфности понадобится, (при максимальном числе входящих и выходящих дуг при вершине равным 5), - 10*N байт. Сравнение объемов требуемой памяти показывает, что для описания топологий систем с размерностями меньшими, чем 80 переменных, эффективнее использовать матрицы смежности. При работе с системами большей размерности выгоднее использовать матрицы изморфности. Однако, учитывая рост затрат времени на расчет линеаризованной системы, получаемый в процессе решения по неявной схеме, работа с моделями больших размерностей не целесообразна. Предлагаемый подход ориентирован на составной и иерархический характер построения модели. Системы с большим числом независимых переменных в этом случае представляются комплексом подсистем, топология которых описывается в отдельных матрицах смежности.
По скорости работы алгоритма, поиск контуров по матрице изоморфности, приведенный в [107], близок к переборному алгоритму на графах [69]. Основные затраты времени в предлагаемом способе приходятся на возведение матрицы смежности в соответствующие степени. При выполнении этой операции с использованием операций умножения затраты времени будут значительными, однако, учитывая что в матрице присутствуют только значения 0 или 1, операцию умножения можно заменить логической операцией “И”, а сложение - логической операцией “ИЛИ”, которые выполняются значительно быстрее. Дополнительным способом повышения скорости является перемножение строки на столбец матрицы с использованием арифметической операции “И”. В этом случае за одну машинную команду “перемножаются” сразу по 16 элементов матрицы. Но для реализации этого понадобится хранить еще одну копию матрицы смежности, записанной по столбцам, а не по строкам, что при современном уровне развития средств вычислительной техники не является уже столь существенными затратами памяти компьютера. Из полученных векторов длиной 16 элементов, логической операцией “ИЛИ” получаем исходное значение.
Данный сравнительный анализ показывает, что представление топологии модели в форме матрицы смежности, по эффективности работы алгоритма поиска контуров и хранению в памяти не уступает представлению топологии в других формах представления.
Конкретные результаты сравнения эффективности алгоритмов по требуемой памяти и скорости работы во многом зависят от топологических особенностей рассматриваемого класса моделей, степени разряженности системы и особенностей программной реализации алгоритмов топологического анализа.
Можно предположить что эти характеристики имеют следующий вид:
Вставить вид характеристик.
6.7. Декомпозиция модели на топологическом ранге неопределенности
Традиционная декомпозиция модели основывается на выделении части графа в подсистему на основе принципа сильных связей, то есть связи элементов внутри подсистемы должны быть значительно сильнее, чем связи между ними и внешними элементами. Существенную часть этой работы, при иерархическом построении модели, выполняет сам пользователь, используя известную ему информацию о функциональном назначении подсистем исследуемого объекта.
В случае большеразмерной (крупномасштабной) системы, численное интегрирование неявными методами, как правило, не эффективно вследствие значительных временных затрат. Снизить затраты возможно в результате проведения редукции системы за счет формальной (искусственной) декомпозиции системы. Алгоритмы для такой декомпозиции на основе выделения сильных компонент можно найти в [63, 70, 107, 119, 120]. Однако в данной работе использован другой подход, связанный с ориентацией разрабатываемых алгоритмов на неявную схему моделирования. Предлагается выделять последовательные цепи элементов или структуры без обратных связей, уравнения которых впоследствии интегрируются явными методами. Уравнения многовходовых элементов (нелинейные, линейные элементы суммирования и сравнения, суперблоки) и разветвления моделируются по неявной схеме.
В результате получается гиперграф, на ребрах которого образуются подсистемы, не содержащие обратные связи. Формируемая на основе преобразованного гиперграфа система уравнений моделируется по явной схеме интегрирования и периодически корректируется (балансируется) по выделенным переменным на основании неявной схемы.
Пример, иллюстрирующий данный подход, показан на рис. 3.5. Исходная система в виде графа (гиперграфа), представлена на рис. 3.5.а. Фрагменты структур, выделенные в процессе предлагаемой топологической декомпозиции для расчета по явной схеме, приведены на рис.3.5.б. Структура, предназначенная для расчета по неявной схеме представлена на рис.3.5.в. Информация, используемая при выполнении этой задачи, представляется в виде списка СНГГ и списка контуров С, получение которых рассматривалось в 3.2.
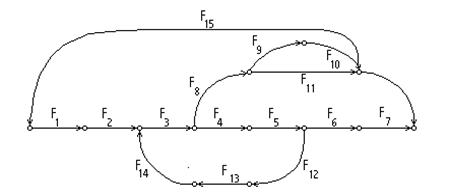
Рис. 3.5.а. Исходная структура модели
Рис. 3.5.б. Подсистемы, выделенные по предлагаемой методике, для которых используется явная схема
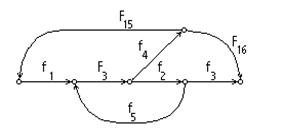
Рис. 3.5.в. Структура, оставленная по предлагаемой методике для расчета по неявной схеме
Эффект применения такого метода декомпозиции связан с увеличением скорости расчетов. Это вызвано снижением размерности подсистемы данного уровня иерархии, рассчитываемого неявными методами. Моделирование выделенных подсистемы не несет значительных вычислительных затрат, вследствие того, что подсистемы рассчитываются явными методами. И если проанализировать график затрат времени расчета по полностью неявной схеме, то при использовании декомпозиции системы, представленной на рис. 2.5, выигрыш по затратам времени составляет более 50 %.
В общем случае расчета всех подсистем по неявной схеме эффект от декомпозиции можно оценить как:
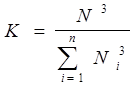 ,
,
где N - размерность исходной системы,  - размерность i подсистемы, n - количество подсистем.
- размерность i подсистемы, n - количество подсистем.
В случае моделирования выделенных подсистем по явной схеме расчета вычислительный эффект, связанный с повышением скорости вычислений можно оценить как:
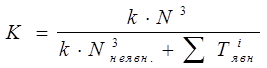 ,
,
где k - коэффициент быстродействия вычислений по неявной схеме,  - время моделирования i -ой выделенной подсистемы данного уровня по явной схеме расчета. Причем из сравнения скоростей расчета по явным и неявным схемам известно что
- время моделирования i -ой выделенной подсистемы данного уровня по явной схеме расчета. Причем из сравнения скоростей расчета по явным и неявным схемам известно что  .
.
Переборный алгоритм, реализующий подобную декомпозицию, приведен на рис. 3.6. В блоках 1 и 2 обнуляются исходные списки элементов, вычисляемых по явной и неявной схеме соответственно. В блоке 3 происходит перенумерация номеров переменных. Критерий для сортировки номеров переменных устанавливается так, чтобы переменная на входе блока имела номер меньше, чем на выходе. Нарушение этого порядка означает наличие обратной связи.
В основном цикле по всем переменным рассматриваемой модели (блоки 4, 5 и 10), производится их разделение на два динамических списка.
В том случае, если относительно рассматриваемой переменной (вершины) обнаруживается замкнутый контур, (номер выходной переменой меньше чем номер входной переменной, или одной из входных переменных (блок 6)), то соответствующее уравнение присоединяется к части модели, рассчитываемой по неявной схеме (блок 8). В блоке 7, в случае разветвления, когда выходная переменная, являющаяся следствием этого уравнения присутствует в качестве причины сразу в нескольких уравнениях, производится дополнительный анализ на предмет необходимости рассчитывать и это уравнение по неявной схеме. Если это разветвление сводится к соединению эквивалентному последовательной цепи элементов, например элемент в приведенном на рис. 3.5 выделенном фрагменте (обозначенным как - f4), соответствующие это уравнение не требуется рассчитывать по неявной схеме, и оно “отправляется” в другой список (блок 9).
6.8. Сортировка модели на топологическом ранге неопределенности
Применяемые различные математические методы, переключения между ними в процессе моделирования, требуют различных подходов к упорядочиванию элементов в подсистемах модели, иначе говоря, записи уравнений. При использовании явных методов традиционно первыми решают алгебраические уравнения, то есть фактически происходит упорядочивание системы уравнений по этому признаку. Предлагаемые адаптивные алгоритмы требуют построения списков на основании причинно-следственных взаимоотношений. Неявные методы, строго говоря, не предполагают упорядочивания элементов, но для повышения скорости расчетов целесообразно провести определенную сортировку. Порядок следования уравнений для всех этих методов различен.
Наиболее сложными и трудоемкими являются неявные методы. Поэтому целесообразно в качестве основного порядка следования уравнений в подсистемах принять порядок элементов, используемый для неявных методов. Порядок следования уравнений для остальных методов записывается в индексные массивы. При переключении с одного алгоритма на другой новые перестановки не производятся и порядок расположения элементов берется из соответствующего массива индексов.
Основные потери быстродействия при численном интегрировании по неявной схеме возникают при решении линейной системы уравнений [85]. Для ускорения этого процесса предлагается на топологическом уровне представления модели расположить уравнения (номера элементов) так, чтобы ненулевые элементы в матрице Якоби (3.9) были расположены в заранее определенном порядке следования. Такое упорядочивание элементов позволяет использовать быстрые, специализированные алгоритмы решения получаемых на каждой итерации систем линейных уравнений [72, 86, 106].
Предлагаемый алгоритм [А14, А17, А24, А35, А44], схема которого представлена на рис. 3.7, предполагает приведение системы к форме, при которой образовывается ленточная матрица (рис. 3.8). Широкий класс алгоритмов для работы с подобными матрицами представлен в работах [1, 72, 86, 92, 96, 106, 108, 122]. Кроме того, необходимо отметить, что приведение к матрице специального вида происходит на уровне топологических моделей, а не на вычислительной стадии расчета.
На рис. 3.9-3.12 представлены результаты проведения предложенной сортировки для тестовой моделей и модели ТГУ-532, показаны матрицы смежности исходных и преобразованных моделей.
Алгоритм построен на основе традиционных обменных методов сортировок [57]. В блоке 1 формируется булевская матрица ненулевых значений матрицы Якоби. Ненулевые элементы в матрице Якоби образуются за счет переменных, являющихся причиной и переменных, являющихся следствием каждого уравнения. Очевидно что это можно записать в матричной форме как:
 ,
,
где I - единичная матица, C - матрица смежности, т - символ транспонирования, A - матрица наличия ненулевых значений матрицы Якоби. Учитывая, что большинство элементов системы составляют элементы типа SISO (один вход и один выход), то матрица будет сильно разряжена.
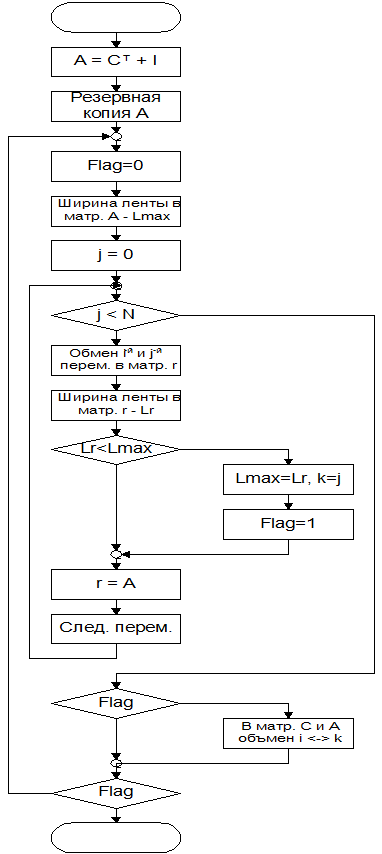
Рис. 3.7. Блок схема алгоритма сортировки на топологических моделях
В блоке 2 создается копия матрицы A, на которой производятся перестановки (r). В блоках 3, 5 организуют основной цикл по переменной flag, устанавливаемый в блоке 4 в нуль. В матрице A, в блоке 5, определяется максимальное расстояние от ненулевого элемента до единичной диагонали lmax, рис. 2.8, и его номер i. Блоки 6,7,14 организуют цикл, где N размерность системы. Блок 9 производит обмен в матице r i и j элементов. При этом, в матрице r, определяется максимальное расстояние до ненулевого элемента (блок 9). Если оно больше определенного lmax, то присваивается новое значение lmax и запоминается при какой перестановке строк оно было достигнуто. Переменная flag устанавливается в 1 (блоки 10,11,12). В блоке 13 возвращается исходное значение матрице A. После завершения цикла (6,7,14) проверяется значение переменной flag. Если flag == 1 (истина) то производятся перестановки в СНГГ, и в соответствующих ему матричных формах представлений C, A (блоки 15,16). Если была произведена перестановка, то работа алгоритма возвращается на п. 4. Если перестановка не была произведена, то получено минимальное значение lmax и алгоритм завершает свою работу.
Подобные перестановки для упрощения расчетной формы модели были предложены Д. Стюардом, а также рассмотрены в [119]. Предлагаемый в них алгоритм предполагает приведение вида матрицы к блочно треугольному виду. Это упрощает расчеты, но не позволяет без потери информации перейти на более быстрые методы, так как матрица остается почти треугольной, а не треугольной [119]. Кроме того, формальный принцип образования диагональных блоков и отказ от учета влияния “отсоединенных частей”, может привести к потере существенной информации о поведении модели.
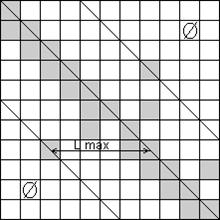
Рис. 3.8. Ленточная матрица
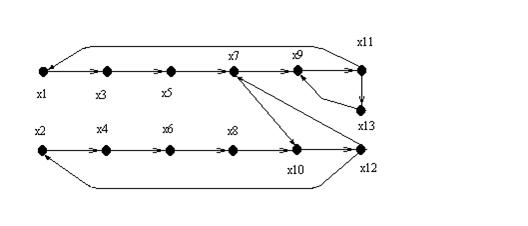
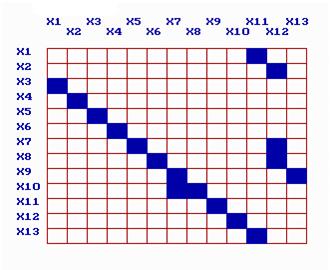
Рис. 3.9. Тестовая модель и ее исходная матрица смежности

 i j
i j

 i
i
 | |
|
|
|
|
Дата добавления: 2013-12-12; Просмотров: 1976; Нарушение авторских прав?; Мы поможем в написании вашей работы!