КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Вычисление координат вершин теодолитного хода
|
|
|
|
Прямая геодезическая задача.
Прямая и обратная геодезические задачи
Вычисление дирекционных углов и румбов сторон разомкнутого теодолитного хода
Угловая невязка разомкнутого теодолитного хода
Рис. 7.6.1. Схема обработки разомкнутого теодолитного хода
Координаты исходных точек А, В и С, D опорной сети и дирекционные углы a 0 и a n известны. Угловая невязка разомкнутого хода (рис. 7.6.1.) вычисляется по формуле
 (7.6.1.)
(7.6.1.)
Координаты исходных точек A, B и C, D опорной сети и дирекционные углы α0 и αn (рис. 7.6.1.) известны. Из рисунка следует
 ,
,
т. е. дирекционный угол каждой последующей линии равен дирекционному углу предыдущей линии плюс 180°, минус вправо по ходу лежащий угол.
При вычислительной обработке результатов измерений на местности, при проектировании инженерных сооружений и перенесении их в натуру возникает необходимость решить прямую и обратную геодезические задачи (рис. 7.7.1.).
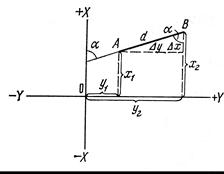
Рис. 7.7.1. Прямая и обратная геодезические задачи
Даны координаты x 1 и y 1 точки А начала линии АВ, ее горизонтальное проложение d и дирекционный угол a. Требуется определить координаты x 2 и y 2 точки В конца этой линии. Из рисунка видно, что координаты
 (7.7.1.)
(7.7.1.)
Разности координат конечной и начальной точек линии АВ, т. е. Dx и Dy называются приращениями координат:
 (7.7.2.)
(7.7.2.)
При помощи румбов приращения координат вычисляются по формулам:
 (7.7.3.)
(7.7.3.)
Приращения координат имеют знаки, которые зависят от знака косинуса и синуса дирекционного угла или от названия румба линии:
| Румбы | СВ | ЮВ | ЮЗ | СЗ |
| Приращения: | ||||
| Dx | + | - | - | + |
| Dy | + | + | - | - |
Вычисление приращений координат выполняют с помощью таблиц натуральных значений sin и cos или с помощью вычислительных машин.
Обратная геодезическая задача. Даны координаты x 1 и y 1 точки А начала линии АВ и координаты x 2, y 2 точки В конца этой линии. Требуется определить длину и дирекционный угол или румб этой линии. Из рисунка следует, что
 (7.7.4.)
(7.7.4.)
или
 , (7.7.5.)
, (7.7.5.)
r определяют по таблицам натуральных значений тригонометрических функций или с помощью микрокалькулятора. Название румба определяют по знакам Dy и Dx. По румбу можно вычислить дирекционный угол a.
Расстояние d вычисляется по формулам
 (7.7.6.)
(7.7.6.)
или
 . (7.7.7.)
. (7.7.7.)
Решая прямую геодезическую задачу вычисляют приращения координат вершин теодолитного хода, затем определяют невязки в приращениях координат.
Невязки в приращениях координат замкнутого полигона
 (7.8.1.)
(7.8.1.)
Вычисляется невязка в периметре
 . (7.8.2.)
. (7.8.2.)
Относительная невязка в периметре должна быть не больше допустимой
 , (7.8.3.)
, (7.8.3.)
где P – периметр полигона.
Если невязка в периметре допустима, то невязки fx и fy распределяют с обратным знаком соответственно на все приращения Dx и Dy пропорционально длинам сторон, для чего вычисляют поправки к приращениям по формулам
 ;
;  . (7.8.4.)
. (7.8.4.)
Сумма поправок должна равняться невязкам с обратным знаком.
После этого вычисляют исправленные приращения координат с контролем
 . (7.8.5.)
. (7.8.5.)
Вычисляют координаты вершин полигона пользуясь правилом: координата последующей точки плюс соответствующее приращение, т. е.
 , (7.8.6.)
, (7.8.6.)
 . (7.8.7.)
. (7.8.7.)
Контроль – вторичное получение координат исходной вершины полигона.
|
|
|
|
Дата добавления: 2013-12-12; Просмотров: 2646; Нарушение авторских прав?; Мы поможем в написании вашей работы!