КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Трансформаторные (взаимоиндуктивные) преобразователи
|
|
|
|
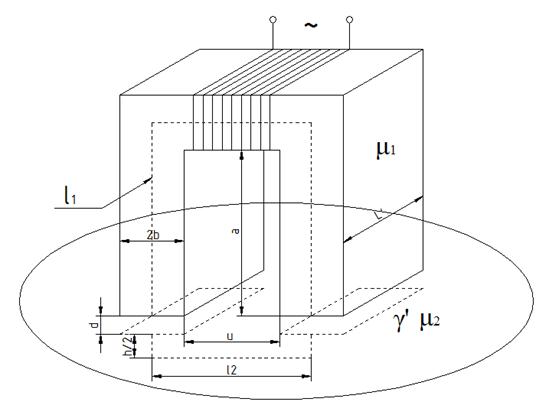
Индуктивные ПИП: физические и математические основы. Расчет бесконтактного индуктивного ПИП с переменным воздушным зазором по магнитной проводимости с использованием свойств аналогии потенциальных полей
Схема индуктивного ПИП представлена на рисунке:
Индуктивность обмотки, расположенной на магнитопроводе будет определяться:
 . (1)
. (1)
Полное магнитное сопротивление:
 (2)
(2)
Активное магнитное сопротивление:
 (3)
(3)
где li, Si и μi – соответственно длина, площадь поперечного сечения и относительная магнитная проницаемость i -го участка магнитопровода, 2d - величина воздушного зазора.
Площадь поперечного сечения воздушного участка магнитопровода:
 .
.
Реактивное магнитное сопротивление:
где
P – потеря мощности в магнитопроводе от гистерезиса,
ω – угловая частота,
Фм – магнитный поток.
Для нашего преобразователя:
 (4)
(4)
где h – глубина проникновения переменного магнитного поля в объект перемещения.
Для того чтобы исключить погрешности, связанные с изменением характеристик магнитопровода, необходимо выполнить условия:
т.е.
 (5)
(5)
 (6)
(6)
В выражении (6)
 (7)
(7)
где f – частота электрического поля,  - электропроводность контролируемого материала. Оптимальным значением параметра h будет значение h = 2 b. Тогда формула (6) принимает вид:
- электропроводность контролируемого материала. Оптимальным значением параметра h будет значение h = 2 b. Тогда формула (6) принимает вид:
 (8)
(8)
При этих условиях из формулы (7) получим частоту магнитного поля:
 (9)
(9)
Для малогабаритных преобразователей мощностью потерь P можно пренебречь. Тогда
XM = 0, a ZM = RM, и выражение (1) примет вид:
L = W2 Gм (10)
Так как магнитная проницаемость зависит от напряженности магнитного поля, то ферриты для магнитопровода следует выбирать из справочных таблиц.
Для выбранной марки феррита значение ампер-витков:
 , (11)
, (11)
где lk – длина катушки,
I – ток катушки,
W – число витков,
H – напряженность магнитного поля.
Выбор диаметра провода определяется допустимым нагревом:
 (12)
(12)
Тогда ток через катушку:
 (13)
(13)
где
 (14)
(14)
Т.к. активное сопротивление катушки
 ,
,
то
 . (15)
. (15)
Напряжение, подаваемое на катушку:
 (16)
(16)
При заданной площади S окна катушки число витков определяется:
 (17)
(17)
где Ку – коэффициент заполнения, значение которого находится в пределах от 0,8 до 0,9.
Сопротивление катушки:
 (18)
(18)
где ρ – удельное сопротивление материала,
Dcp – средний диаметр витков катушки,
S – площадь сечения.
Рассчитаем электромеханическую силу притяжения объекта:
 (19)
(19)
Расчет магнитной проводимости
Для этого используем метод непосредственного определения напряженности магнитного поля в сочетании с методом конформных преобразований. Это возможно с учетом математических аналогий между магнитными и электростатическими полями.
Таким образом, вектор напряженности магнитного поля соответствует вектору электростатического поля:

Разность магнитных потенциалов:

Магнитный поток на единицу длины:
 ,
,
где τ – заряд проводника на единицу длины.
Магнитная проницаемость:
μ → ε,
где ε – диэлектрическая проницаемость.
Магнитная проводимость на единицу длины:
GM → C,
где С – электрическая емкость на единицу длины.
На основании указанных методов магнитная проводимость:
где K (k 0) – элептические интегралы 1-го рода.
Приближенная формула для расчета магнитной проводимости примет вид:
 (20)
(20)
где d0 - контролируемое расстояние от объекта до магнитопровода.
Если  то погрешность формулы (20) не превышает 4%.
то погрешность формулы (20) не превышает 4%.
Расчет и проектирование индуктивного измерителя микроперемещений
1. Выбор типа преобразователя
Обычно используются преобразователи с П-образным магнитным сердечником.
2. Расчет номинальной статической характеристики
При выполнении условий (5), (8), (9) и с учетом выражения (20) номинальная статическая характеристика для индуктивного преобразователя примет вид:
 (21)
(21)
Для того, чтобы уменьшить предельную относительную погрешность необходимо выполнить следующие условия:
 (22)
(22)
 (23)
(23)
 (24)
(24)
 (25)
(25)
 (26)
(26)
где f - частота источника питания.
3. Расчет относительной чувствительности
В общем виде относительная чувствительность:
 .
.
Тогда на основании выражения (21) чувствительность:
 (27)
(27)
Если d/b → 0, b/a >> 1 =>  . Минус говорит о том, что с увеличением перемещения индуктивность уменьшается.
. Минус говорит о том, что с увеличением перемещения индуктивность уменьшается.
4. Выявление и классификация составляющих результирующей погрешности
Результирующая погрешность складывается из большого числа составляющих погрешностей, обусловленными внешними влияющими факторами, к которым относятся:
- внешнее электромагнитное поле;
- магнитоупругий эффект;
- тензометрический эффект;
- старение материалов;
- температура окружающей среды, которая изменяет геометрические размеры ПИП b, a, L’;
- погрешность от нелинейности номинальной статической характеристики.
Последние две – существенные. Обозначим эти погрешности: 
 , где
, где  - от ошибки измерения индуктивности.
- от ошибки измерения индуктивности.
5. Составление и анализ уравнения погрешности
Относительная погрешность от нелинейности номинальной статической характеристики  является системотической и наиболее существенной, потому примем:
является системотической и наиболее существенной, потому примем:
 . (28)
. (28)
Остальные погрешности как и для емкостного микромера примут вид:
 . (29)
. (29)
Поэтому:
 (30)
(30)
6. Определение составляющих результирующей погрешности прибора
Составляющие результирующей погрешности в аналитической форме определяются из выражения:  и с учетом выражений для номинальной статической характеристики и чувствительности преобразователя примут вид:
и с учетом выражений для номинальной статической характеристики и чувствительности преобразователя примут вид:
 (31)
(31)
 (32)
(32)
 (33)
(33)
 (34)
(34)
 (35)
(35)
где
 - температурный коэффициент линейного расширения материала магнитопровода,
- температурный коэффициент линейного расширения материала магнитопровода,
D – половина диапазона преобразования,
 – расстояние от объекта до магнитопровода.
– расстояние от объекта до магнитопровода.
Т.к. погрешности  ,
,  ,
,  вызваны одним источником (температурой), то они складываются алгебраически:
вызваны одним источником (температурой), то они складываются алгебраически:
 , (36)
, (36)
где
 (37)
(37)
Обычно в техническом задании на проектирование прибора дается диапазон 0 ± D и абсолютная погрешность измерения, при этом относительная результирующая погрешность  и приведенная
и приведенная  связаны между собой соотношением:
связаны между собой соотношением:
 (38)
(38)
На основании выражения (38) формулы для определения составляющих результирующей погрешности будут выглядеть:
 (39)
(39)
 (40)
(40)
 (41)
(41)
При этом
 (42)
(42)
 (43)
(43)
 (44)
(44)
7. Определение конструктивно-технологических параметров ПИП
Параметры прибора выбирают путем приравнивания правой и левой частей соответствующих уравнений (39)-(44) и формул, полученных в данном разделе, т.е.
 (45)
(45)
(46)
 (47)
(47)
8. Выбор измерителя индуктивности.
Для измерения индуктивности обычно используются мосты переменного тока. В таком случае схема включения преобразователя примет вид, где
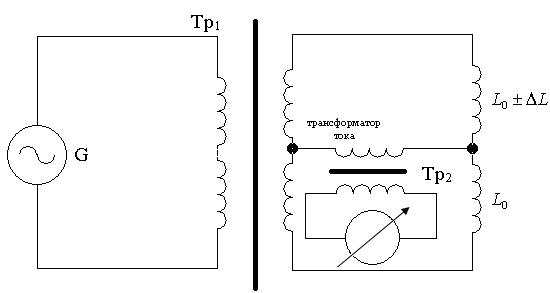
 - измерительный ПИП,
- измерительный ПИП,
 - компенсационный ПИП.
- компенсационный ПИП.
В основу этих преобразователей положено явление взаимоиндукции между первичной и вторичной обмотками. Схема дифференциального трансформаторного ПИП показана на рисунке
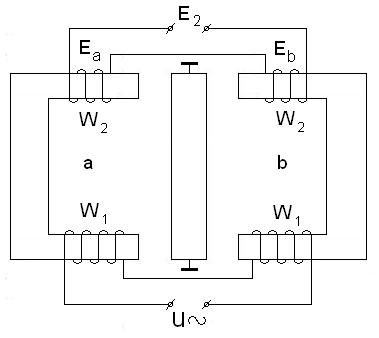
Если сравнить схемы индуктивного и взаимоиндуктивного ПИП то можно отметить, что конструкции их магнитной цепи одинаково, а отличаются они только числом обмоток.
При центральном расположении сердечника ЭДС вторичных обмоток равны между собой и суммарная выходная ЭДС Е2=0, так как обмотки включены встречно. При совмещении сердечника ЭДС Е2 определяется по формуле

Пологая, что  , а
, а  , можно упросить это выражение:
, можно упросить это выражение:
|
|
|
|
Дата добавления: 2013-12-11; Просмотров: 1298; Нарушение авторских прав?; Мы поможем в написании вашей работы!