КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Навигационный доступ к данным в БД
|
|
|
|
Структурная схема эхолота
Методы измерения времени. Структурная схема эхолота во многом зависит от метода, избранного в данном приборе для измерения весьма малого промежутка времени между моментом посылки и приходом отраженного (эхо) сигналов. В настоящее время существуют два таких метода: электромеханический и электронный.
Электромеханический метод. Структурная схема, изображенная на рис. 5.24, иллюстрирует сразу три модификации этого метода.
Вариант I часто называют методом вращающегося диска. Суть его заключается в следующем. Электродвигатель 8 с помощью механической передачи вращает так называемый диск / глубин и кулачок кон-гактной группы 3. Скорость вращения диска I рассчитана так же, как и частота посылок, и, следовательно, пропорциональна принятому значению скорости Су звука и максимальной глубине.
Когда неоновая лампочка 2 проходит нуль неподвижной шкалы, контактная группа 3 заставляет сработать спусковое устройство 7. Последнее приводит в действие генератор 15, и на вибратор-излучатель 16 подается мощный электрический сигнал. Вибратор 16 преобразует его и по направлению морского дна посылает ультразвуковой кмпульс. Достигнув дна, импульс отражается, возвращается к приемнику 17 и механически воздействует на него. В результате на выходе вибратора-приемника 17 возникает электрический эхо-сигнал напряжением в несколько десятков микровольт. Это напряжение усиливается в блоке 18 и подается к лампочке 2. Так как диск / вращается со скоростью, пропорциональной скорости звука, то за время I между моментами посылки сигнала и прихода эха он успеет повернуться на угол, пропорциональный глубине, и лампочка 2 даст вспышку против отсчета, соответствующего измеренной глубине.
В варианте II вместо диска установлен полый барабан 4, на по-герхности которого уложен один виток проволоки 6 (спирали). Рядом с барабаном крепится металлическая пишущая линейка 5. Между 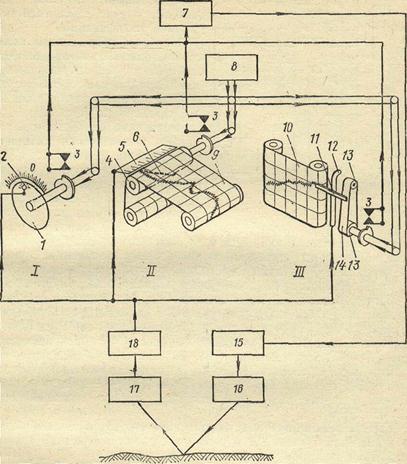
ними пропущена специальная бумажная лента 9. Линейка и спираль (через бумагу) имеют только одну точку соприкосновения. Когда эта точка расположена против нуля шкалы, нанесенной на линейке, происходит посылка звукового импульса. За время 1 эта точка вследствие вращения барабана со скоростью ^Сц успеет.переместиться вдоль линейки на расстояние, пропорциональное глубине. В результате эхо-сигнал выжжет на бумаге отметку, соответствующую отсчету глубины.
Основой варианта III является бесконечная армированная нейлоновая лента 14, натянутая на шкивах 13. Лента несет на себе перо 11, скользящее по металлической шине 12 и записывающее на бумажной ленте 10 профиль глубин. Принцип действия этого устройства следующий. Перо, прикрепленное к ленте, делает вместе с ней круговое движение. В момент, когда оно проходит нулевую отметку посылается импульс с помощью контактной группы. Затем, когда приходит эхо, перо притягивается к бумаге и делает точку на измеренной глубине.
Навигационный лаг.
Лаг представляет собой устройство, определяющее скорость судна и пройденное им расстояние. Лаги подразделяются на абсолютные и относительные. Первые из них измеряют скорость судна относительно неподвижных точек морского дна, а вторые — относительно движущейся воды. Таким образом, относительные лаги не учитывают течения. На морских судах находят применение гидроакустические и геомагнитные абсолютные лаги, а также гидравлические, индукционные и вертушечные относительные лаги.
Ниже рассматриваются основы гидроакустического доплеровского лага.
Действие гидроакустического лага основано на эффекте Доплера, заключающемся в изменении частоты волнового акустического излучения в тех случаях, когда излучатель или приемник установлен на движущемся объекте. Из школьного курса физики известно, например, что тон гудка движущегося на наблюдателя поезда отличается от тона гудка стоящего поезда и отличается от гудка поезда, удаляющегося от наблюдателя.
При излучении с движущегося судна акустической энергии в наклонном направлении к морскому дну и приеме рассеянного дном эхо-сигнала, частота принятых сигналов отличается от частоты излучаемых на величину, зависящую от скорости судна и называемую доплеровским приращением частоты эхо-сигнала. Доплеровское приращение частоты эхо-сигнала пропорционально скорости движения судна и определяется выражением:  (1)
(1)
где  - доплеровское приращение частоты эхо-сигнала, Гц;
- доплеровское приращение частоты эхо-сигнала, Гц;
 - принимаемая частота, Гц;
- принимаемая частота, Гц;
 - излучаемая частота, Гц;
- излучаемая частота, Гц;
V- горизонтальная составляющая скорости движения, м/с;
С - скорость распространения акустических колебаний в среде, м/с;
 - угол между направлением излучения (приема) и вертикалью, рис. 1.
- угол между направлением излучения (приема) и вертикалью, рис. 1. 
Рис. 1
В доплер-лагах применяются двухлучевые и четырехлучевые антенны с симметричной относительно диаметральной плоскости судна ориентацией лучей в горизонтальной плоскости.
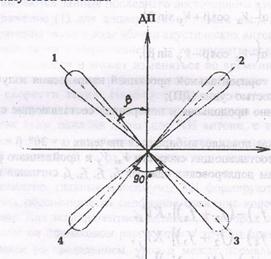
Рис. 2
Такое расположение лучей позволяет измерять скорость судна не только по курсу, но и в поперечном направлении (боковые смещения), что важно при швартовке судна.
Современные лаги обеспечивают:
— измерение продольной и поперечной составляющих скорости судна относительно грунта;
— определение продольной и поперечной составляющих скорости судна относительно глубинных слоев воды по сигналам объемной реверберации;
— вычисление продольной и поперечной составляющих пройденного расстояния или величины пройденного судном расстояния по линии пути и угла суммарного сноса судна;
— сигнализацию о прохождении судном заданного расстояния;
— расчет скорости и направления течения на трех заданных глубинах или скорости судна относительно этих глубинных слоев воды;
— измерение глубины в точке падения любого из шести лучей на морское дно и горизонтальных расстояний от этих точек до места установки антенн;
— определение средних значений статических углов крена и дифферента на ходу судна;
— вычисление поперечной составляющей скорости движения носовой и кормовой оконечностей судна при швартовке (когда включена кормовая станция).
В лагах существует система контроля, которая обеспечивает:
— тестовый контроль работоспособности лага;
— определение неисправности отдельных блоков;
— индикацию номера неисправного блока;
— сигнализацию об отсутствии соединения в контактах или об установке блока не на свое место;
— индикацию нормальной работы отдельных блоков.
С целью обеспечения электромагнитной совместимости в лаге предусмотрена синхронизация его излучения с другими системами судна.
ЛИТЕРАТУРА
Блинов И.А., Жерлаков А.В., Перфильев В.К., Смирнов Е.Л., Якушенков А.А. Электронавигационные приборы. М. «Транспорт», 1980, 447 с.
2.2. Система подвеса гироблока
При изучении системы подвеса гироблока следует воспользоваться рис. 7.
d 3 3 4.5 в
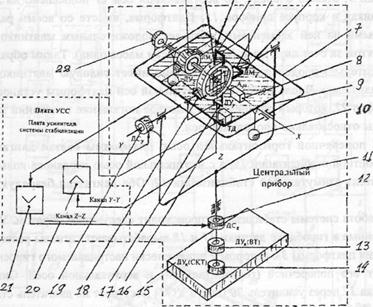
Рис. 7
В число основных составных частей гироблока входят: динамически настраиваемый гироскоп 2, его приводной двигатель 1, датчики угла 17 и 18, датчики момента 4 и 5. Приводной двигатель / через вращающийся упругий подвес связан с ротором гироскопа 2.
Кроме гироблока на платформе 3 размещен акселерометр 8 (индикатор горизонта), ось чувствительности которого ориентирована параллельно продольной оси (т.е. оси X - X) гироблока. Этот акселерометр вырабатывает сигнал, пропорциональный углу р отклонения продольной оси платформы и, следовательно, гироблока от плоскости горизонта.
Платформа 3, на которой установлены гироблок и акселерометр, имеет трехстепенной стабилизированный по азимуту и высоте относительно гироскопа подвес.
Существует два способа работы с записями в НД.
Способ, основанный на использовании операторов SQL, предполагает оперирование группами записей. Именно так работают SQL-операторы группового обновления НД UPDATE, INSERT, DELETE и выборки групп записей SELECT. Записи, удовлетворяющие некоторому условию, выдаются группами; даже если условию удовлетворяет только одна запись, считается, что в данном случае группа состоит из одной записи.
Второй способ состоит в оперировании единичными записями. Если необходимо изменить, добавить или удалить группу записей, необходимая операция выполняется для каждой из таких записей. Для этого такие записи в НД нужно отыскать, для чего применяются навигационные методы. Они всегда работают с единичной записью и связанны с понятием курсора НД.
Понятие курсора набора данных. Под курсором набора данных понимается указатель текущей записи в конкретном наборе данных. Текущая запись - та запись, над которой в данный момент времени можно выполнять какие-либо операции (удаление, изменение, чтение значений, содержащихся в записи полей).
Существует 5 методов для изменения курсора НД, котрые представлены в таблице 27:
Определение начала и конца набора данных:
1) Свойство property BOF: Boolean;
Возвращает True, если курсор установлен на первую запись в наборе данных.
2) Свойство property EOF: Boolean;
Возвращает True, если курсор установлен на последнюю запись в наборе данных.
Таблица 27 – Методы изменения курсора
| Название метода | Назначение |
| procedure First; | Устанавливает курсор на первую запись в наборе данных. |
| procedure Last; | Устанавливает курсор на последнюю запись в наборе данных. |
| procedure Next; | Перемещает курсор на следующую запись в наборе данных. |
| procedure Prior; | Перемещает курсор на предыдущую запись в наборе данных. |
| function MoveBy(n:Integer): Integer; | Перемещает курсор на n записей к'концу набора данных (n > 0) или к началу набора (n < 0.) |
|
|
|
|
|
Дата добавления: 2013-12-13; Просмотров: 657; Нарушение авторских прав?; Мы поможем в написании вашей работы!