1. Какие кривые линии называют алгебраическими и какие трансцендентными?
2. Что называют порядком алгебраической кривой?
3. Что называют кривизной плоской кривой и как ее определяют графически?
4. Дайте определение эволюты и эвольвенты плоской кривой.
5. Назовите основные свойства эволют и эвольвент.
6. Какие кривые линии называют монотонными?
7. Какие кривые линии называют овалами? Покажите примеры овалов.
8. Какие кривые линии называют соприкасающимися?
9. Какое преобразование плоских кривых называют коихоидальным, инверсией, конформным?
10. Какие кривые линии называют кривыми линиями второго порядка? Расскажите о каждой из них.
11. Какие кривые называют эквидистантными?
12. Какие пространственные кривые называют гелисами и как их задают на эпюре Монжа?
13. Как определяют на чертеже направление (ход) цилиндрической винтовой линии?
14. Расскажите о конических винтовых линиях.
В математике под поверхностью принято понимать непрерывное множество точек, если между координатами точек этого множества может быть установлена зависимость, определяемая уравнением вида F (x; y; z) = 0, где F (x; y; z) – многочлен n-й степени или в форме какой-либо трансцендентной функции. В первом случае поверхности называют алгебраическими, во втором – трансцендентными.
Одной из общих характеристик поверхности является ее порядок, который может быть определен числом действительных и мнимых точек ее пересечения с произвольной прямой, не принадлежащей поверхности.
В начертательной геометрии поверхность как объект инженерного исследования может быть задана: множеством точек, уравнением, чертежом и др.
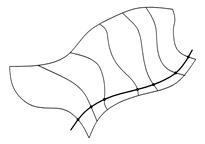
Поверхность можно рассматривать как совокупность последовательных положений некоторой линии a (образующей или производящей), характер которой может либо оставаться неизменным, либо непрерывно меняться по некоторому закону. Этот закон в принципе можно задать любым способом, однако для наглядности изображения поверхности на комплексном чертеже его целесообразно задавать графически в виде семейства линий (направляющих) m, n и l (рис. 129). В ряде случаев закон перемещения линии а может быть задан одной m или двумя m и n направляющими и дополнительными условиями, уточняющими закон перемещения образующей.
В ряде случаев одна и та же поверхность может быть образована различными путями. Например, прямой круговой цилиндр может быть образован вращением прямолинейной образующей вокруг параллельной ей оси, путем поступательного перемещения некоторой окружности (при этом ее центр перемещается вдоль некоторой оси i, а ее плоскость все время остается перпендикулярной этой оси), путем поступательного перемещения сферы вдоль некоторой оси i (при этом центр сферы все время перемещается вдоль оси) и др.
Поэтому во избежание неоднозначности в каждом случае принимают наиболее простой способ. Например,
l
если задан прямой круговой цилиндр, то считают (если это не противоречит каким-либо другим условиям), что он образован способом вращения.
n
m
a
Поверхность задается определителем D = [G] Щ [A], где D – определитель поверхности; G – геометрическая часть определителя; А – алгоритмическая часть определителя.
Определителем поверхности называют совокуп-
Рис. 129 ность условий, необходимых и достаточных для одноз-начного задания поверхности. Определитель содержит в себе некоторые постоянные геометрические элементы и данные соотношений между этими элементами, т.е. закон образования поверхности, который обеспечивает переход от постоянных геометрических элементов поверхности к ее переменным элементам – точкам и линиям в различных положениях на поверхности.
Такой набор графических операций для образования поверхности и их последовательность называют алгоритмомповерхности.
Определитель может быть выражен различным образом, прежде всего, аналитически. Однако, упомянутый способ задания поверхности обладает определенным недостатком - не всегда обеспечивает наглядность на ортогональном чертеже, что затрудняет его чтение. Поэтому на ортогональном чертеже проекции геометрических элементов определителя дополняют очерками поверхностей.
Очеркомповерхности называют след на плоскости проекций проецирующей цилиндрической поверхности, которая огибает заданную поверхность.
Однако аналитическое описание поверхности может быть слишком сложным, а в ряде случаев и просто ненужным, особенно в практических приложениях. В таких случаях в роли определителя поверхности выступает каркас, т.е. минимальное множество принадлежащих точек или линий, позволяющих с достаточной степенью точности построить любую принадлежащую ей точку.
В первом случае мы получаем так называемый точечный каркас. Точечные каркасы имеют ограниченное применение и используются главным образом в строительстве и землеустроительных работах. Для реализации такого каркаса в землю по некоторой сетке забиваются деревянные колья таким образом, чтобы их концы находились на проектной отметке (высоте).
Во втором случае мы получаем так называемый лекальный каркас, который используется более широко.
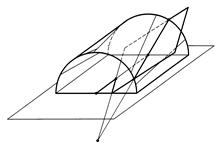
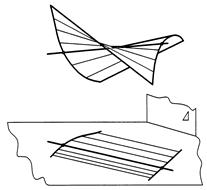
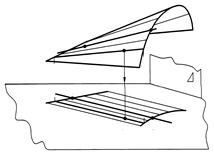
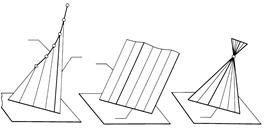
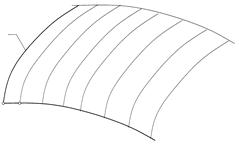
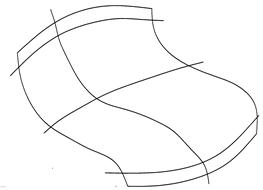
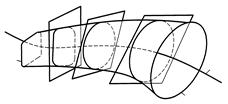
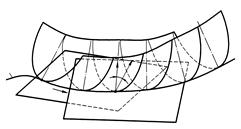
Так каркас, заданный семейством линий, используется для выполнения штампов при изготовлении поверхности из листового материала. Такой каркас получают при пересечении поверхности семейством параллельных плоскостей, проходящих на одинаковом расстоянии друг от друга. Модель такого каркаса из дерева представлена на рис. 130.
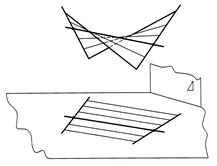
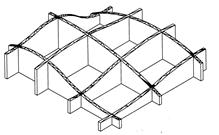
Однако, значительно чаще применяют каркасы, заданные двумя семействами линий. Модель такого каркаса представлена на рис. 131. Она собрана из досок, представляющих собой продольные и поперечные стригера, имеющие пазы для сборки. Если теперь полученный каркас обтянуть каким-либо материалом, то получим соответствующую ему поверхность. Такие каркасы находят широкое применение при изготовлении кузовов автомобилей, в самолетостроении, судостроении, а также в строительстве. Действительно, если такой каркас заполнить строительным материалом, например, бетоном, то получим площадку заданной формы.
C
B
A1
C1
B1
A
Рис. 130 Рис.131
Задание поверхности каркасом носит чисто прикладной характер, поэтому мы этим способом в дальнейшем практически не будем пользоваться.
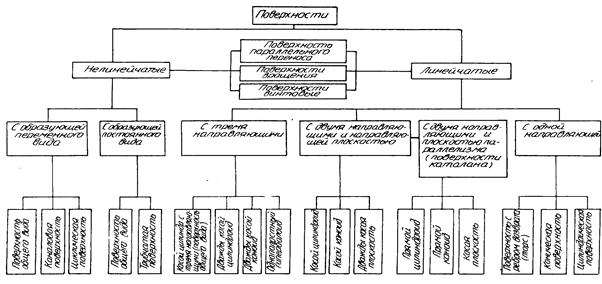
Основой классификации поверхностей служат их определители или геометрические особенности, связанные с кинематическим способом их образования. Поверхности принадлежат к одному классу, если они имеют единую структурную форму определителя и одинаковое значение его геометрической части.
Поверхности разделяются на два класса (линейчатые и нелинейчатые поверхности) и три подкласса (поверхности параллельного переноса, поверхности вращения и винтовые поверхности) (см. рис. 132).
К нелинейчатым относятся поверхности с криволинейной образующей. В свою очередь, нелинейчатые поверхности делятся на две группы: с образующей переменного вида и с образующей постоянного вида.
Нелинейчатые поверхности с образующей переменного вида могут быть описаны определителем типа:
D = (a, m)[Aa, Am],
где а – образующая;
m – направляющая;
Аа – закон изменения формы образующей;
Аm – закон перемещения образующей по направляющей.
Рис. 132
Эта группа включает поверхности общего вида, каналовые и циклические.
Поверхность общего вида (рис. 133) образуется перемещением произвольной криволинейной образующей (а) по произвольной криволинейной направляющей m.
В процессе движения образующая а может менять свою форму по некоторому закону. Каналовая поверхность образуется непрерывным каркасом замкнутых плоских сечений, определенным образом ориентированных в пространстве, а площади этих сечений монотонно изменяются в процессе их перемещения по направляющей (рис. 134).
При образовании каналовых поверхностей можно наложить дополнительные условия, например, чтобы образующие плоские сечения были параллельны какой-либо плоскости, так называемой плоскости параллелизма, или были перпендикулярны к направляющей m. При этом в первом случае мы получим каналовые поверхности с плоскостью параллелизма, а во втором – нормальные (прямые) каналовые поверхности.
an
m
П1
П2
П3
a
m
a1
a2
a3
an
Рис. 133 Рис. 134
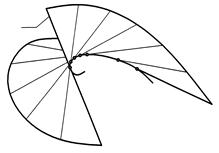
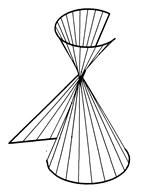
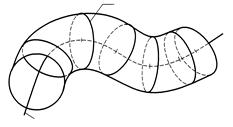
Циклическая поверхность (рис. 135) образуется при помощи окружности а, центр которой перемещается по криволинейной направляющей m. При этом диаметр окружности монотонно изменяется.
A1
П1
a
A2
П2
j
m
Рис. 135 Рис. 136
a
Нелинейчатые поверхности с образующей постоянного вида могут быть описаны определителем типа
D = (a, m)[Am]
Эта группа включает поверхности общего вида и трубчатые.
m
Поверхность общего вида (рис. 136) образуется произвольной кривой а, характер перемещения которой
Рис. 137 определяется формой и положением направляющей m и
дополнительными условиями.
Трубчатая поверхность может рассматриваться как частный случай циклической и каналовой поверхностей. Трубчатая поверхность образуется движением окружности а постоянного радиуса по криволинейной направляющей m, при этом плоскость окружности должна все время оставаться перпендикулярной к направляющей (рис. 137).
Трубчатые поверхности получили широкое распространение в строительстве, технике и др.
К линейчатым относятся поверхности с прямолинейной образующей. Класс линейчатых поверхностей включает три группы: поверхности с тремя, с двумя и с одной направляющей. Группа линейчатых поверхностей с тремя направляющими описывается определителем типа
D = (m, n, l)
и включает косой цилиндр, дважды косые цилиндроид и коноид и однополосный гиперболоид.
Поверхность косого цилиндра с тремя направляющими (поверхность общего вида) образуется при движении прямолинейной образующей (а) по трем криволинейным направляющим m, n, l (см. рис. 138).
Дважды косой цилиндроид (рис. 139) образуется в том случае, когда две из трех направляющих – кривые, а третья – прямая линия.
Рис. 138 Рис. 139
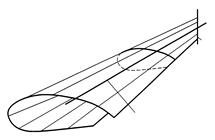
Если все три направляющие расположены в параллельных плоскостях, то образуется частный случай дважды косого цилиндроида – поверхность косого клина (рис. 140), которая используется при конструировании крыла летательного аппарата.
N
n
Вторым частным случаем является поверхность косого перехода (рис. 141). Она образуется, когда в качестве криволинейных направляющих принимают дуги окружностей одинакового радиуса, расположенные в параллельных плоскостях, а в качестве третьей направляющей – прямую, перпендикулярную к плоскостям окружностей и проходящую через середину отрезка, который соединяет центры окружностей. Поверхность косого перехода находит применение в архитектуре и строительной практике.
l
L
O2
M
O1
m
O
Рис. 140 Рис. 141
Поверхность дважды косого коноида (рис. 142) образуется в случае, когда одна из трех направляющих – кривая, а две других – прямые линии.
N
M
a
m
l
L
n
Рис. 142
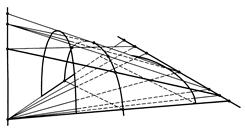
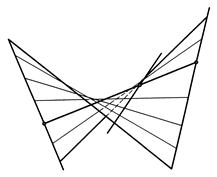
Поверхность однополостного гиперболоида может быть получена при движении прямолинейной образующей (а) по трем скрещивающимся прямым, не параллельным одной плоскости (рис. 143).
Однополостный гиперболоид является одной из поверхностей, обладающих замечательным свойством. Если образующую (а) зафиксировать в положении а1, а2, а3, т.е. взять три таких образующих и их принять за направляющие, а направляющие m, n, l – за образующие, то при этом получим ту же поверхность. Иными словами, в однополостном гиперболоиде имеются два семейства прямолинейных образующих, причем образующие одного семейства не пересекаются между собой, но каждая из образующих одного семейства пересекает все образующие другого семейства.
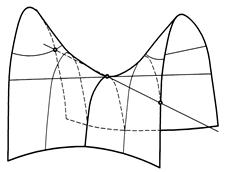
В частном случае, если все три направляющие параллельны некоторой плоскости, то получается поверхность, которая называется гиперболическим параболоидом (рис. 144).
Это название поверхность получила в связи с тем, что при сечении плоскостями, параллельными П2и П3, образуется парабола, а при сечении плоскостями, параллельными плоскости П1, – гипербола.
Поверхность гиперболического параболоида обладает тем замечательным свойством, что ее образующие параллельны некоторой плоскости. В частном случае эти плоскости параллелизма могут быть взаимно перпендикулярны. В этом случае гиперболический параболоид получил название прямого. Если плоскости параллелизма составляют угол, отличный от прямого, то гиперболический параболоид называют наклонным.
Рис. 143 Рис. 144
Линейчатые поверхности с двумя направляющими могут быть однозначно образованы только при наложении некоторых дополнительных условий, в частности, при использовании некоторой плоскости.
Если образующей (а) задать закон перемещения, чтобы она, скользя по направляющим m и n, все время сохраняла постоянный угол j с некоторой плоскостью D, называемой направляющей плоскостью, то мы получим группу так называемых линейчатых поверхностей с двумя направляющими и направляющей плоскостью.
При этом плоскость D заменяет ту третью направляющую l, которая образуется множеством точек пересечения движущейся прямолинейной образующей (а) с плоскостью D. В связи с этим поверхности данной группы могут быть описаны определителем вида
D = (m, n) [AD],
где AD – алгебраическая часть определителя, содержащая указание, что прямолинейная образующая в процессе движения все время сохраняет постоянный угол j с направляющей плоскостью D.
Эта группа включает косые цилиндроид и коноид и дважды косую плоскость.
Если направляющая плоскость D составляет с образующей а угол в 00, т.е. стала плоскостью параллелизма, мы получим линейчатые поверхности с двумя направляющими и плоскостью параллелизма или так называемые поверхности Каталана. В группу поверхностей Каталана входят прямые цилиндроид, коноид и гиперболический параболоид (косая плоскость).
Прямой цилиндроид (рис. 145) образуется в том случае, если в качестве направляющих m и n принять гладкие кривые линии, причем одна из них (в данном случае n) принадлежит плоскости, перпендикулярной плоскости параллелизма D.
M
a
A1
a1
m1
M1
N
N1
n1
n
m
M1
N1
n1
m1
N
n
M
m
a
a1
Рис. 145 Рис. 146
Прямой коноид (рис.146) отличается от прямого цилиндроида только тем, что одна из его направляющих – прямая.
Поверхность прямого коноида используется в гидротехническом строительстве для формирования поверхностей устоев мостовых опор.
Прямой гиперболический параболоид (косая плоскость) может быть образован скольжением образующей прямой (а) по двум скрещивающимся прямым направляющим m и n, причем образующая (а) все время остается параллельной плоскости параллелизма D (рис. 147).
В технике гиперболический параболоид часто называют косой плоскостью. Косая плоскость находит широкое применение в инженерно-строительной практике при формировании поверхностей откосов насыпей, насыпей автомобильных и железных дорог, набережных, гидротехнических сооружений в местах сопряжения откосов, имеющих различные углы наклона.
Линейчатые поверхности с одной направляющей также могут быть однозначно образованы только при наложении некоторых дополнительных условий, причем эти условия не являются общими для всей группы поверхностей.
Общий вид определителя для всех поверхностей этой группы остается постоянным, однако его алгебраическая часть в каждом конкретном случае имеет свой смысл:
D = (m) [Am]
Группа линейчатых поверхностей с одной направляющей включает поверхности с ребром возврата (торсы), конические и цилиндрические поверхности.
Поверхность с ребром возврата (торс) (рис. 148) образуется непрерывным перемещением прямолинейной образующей а, касательной к некоторой пространственной криволинейной направляющей m.
n
m
M1
N
N1
n1
M
m1
a
a1
Рис. 147 Рис. 148
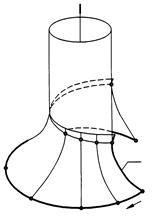
Коническая поверхность (рис. 149) образуется непрерывным перемещением прямолинейной образующей а вдоль некоторой пространственной криволинейной направляющей m, проходящей через одну и ту же точку S, называемую вершиной. Коническая поверхность имеет две полости. Часто под конической поверхностью подразумевают одну из этих полостей.
Цилиндрическая поверхность образуется в том случае, когда прямолинейная образующая а перемещается по криволинейной направляющей m, все время оставаясь параллельной некоторой прямой.
Нетрудно видеть, что все линейчатые поверхности с одной направляющей вырождаются в плоскость, когда направляющая m является прямой (рис. 150).
Поверхности параллельного переноса образуются поступательным перемещением плоской образующей (а), одна из точек которой перемещается по криволинейной направляющей m (рис. 151). Если за образующую взять линию m, а за направляющую кривую а, то мы получим ту же поверхность параллельного переноса.
Поверхность вращения (рис. 152) можно получить, если некоторую образующую (а) вращать вокруг неподвижной оси m (при этом в качестве образующей (а) может быть принята прямая линия, плоская или пространственная кривая).
Определитель поверхности вращения будет иметь вид:
D = (a, m) [A]
Алгоритмическая часть определителя содержит условие, что образующая (а) вращается вокруг оси m. В процессе образования поверхности каждая точка образующей а (A, B, C, D, E) при вращении вокруг оси m описывает окружность с центром на оси вращения. Эти окружности называют параллелями. Наибольшая и наименьшая из этих окружностей получили специальные названия – экватор и горло (шейка).
Рис. 149 Рис. 150
A2
A1
a
Рис. 151 Рис. 152
Плоскости, проходящие через ось вращения, называют меридиональными, а линии, по которым они пересекают поверхность, – меридианами. Плоскость, параллельную фронтальной плоскости проекций, называют главной меридиональной плоскостью, а линию ее пересечения с поверхностью вращения – главным меридианом.
К поверхности вращения относятся: конус вращения, цилиндр вращения, сфера, тор, глобоид, эллипсоид вращения, параболоид вращения, однополостный, двуполостный гиперболоид вращения.
Винтовые поверхности образуются в результате винтового перемещения образующей а.
Винтовые перемещения являются совокупностью двух движений образующей – поступательного перемещения вдоль некоторой оси и вращательного движения вокруг той же оси.
Общий вид определителя винтовых поверхностей следующий:
D = (a, m) [A]
Алгоритмическая часть определителя содержит дополнительные указания о характере винтового перемещения образующей а.
Основными характеристиками винтовой поверхности являются ее диаметр и шаг. Диаметром винтовой поверхности принято считать диаметр описанного цилиндра. Шаг поверхности измеряется величиной продольного перемещения какой-либо точки образующей при повороте ее вокруг оси на один полный оборот.
Если величина шага не меняется, то такие поверхности называют винтовыми поверхностями с постоянным шагом, в противном случае – с переменным шагом.
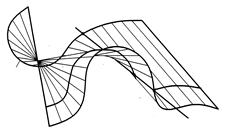
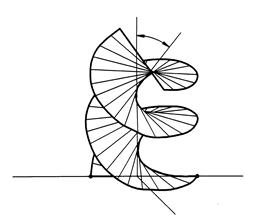
Если в качестве образующей принять кривую, то мы получим винтовую поверхность с криволинейной образующей (рис. 153), если прямую - винтовую поверхность с прямолинейной образующей.
Винтовые поверхности с прямолинейной образующей и постоянным шагом получили название геликоидов.
x
a
B2
B3
y
A1
A2
A3
m
An
x
m
B1
Bn
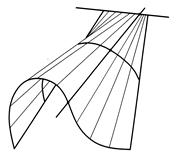
90o
Рис. 153 Рис. 154
Если образующая составляет с осью прямой угол, то такой геликоид называют прямым (рис. 154), в противном случае – косым или наклонным. Если образующая пересекается с осью, то геликоид называют закрытым, если скрещивается – открытым.
Винты, шнеки, сверла, пружины поверхности лопаток турбин и вентиляторов, рабочих органов судовых и воздушных винтов и многие другие технические устройства выполнены с использованием винтовых поверхностей.
Для построения любой принадлежащей поверхности линии достаточно построить ряд ее определенных точек и соединить их между собой. Все принадлежащие линии точки можно разбить на две группы.
К первой группе относятся точки, которые называются опорными. К ним относятся точки начала и конца кривой линии, точки, являющиеся вершинами, точки, расположенные в плоскостях симметрии, поверхности или точки, находящиеся на характерных линиях.
Ко второй группе отнесем точки, которые влияют только на точность построения заданной линии. Эти точки называются вспомогательными и дополнительными. В общем случае непосредственное определение недостающих проекций заданной точки на ортогональном чертеже не представляется возможным, поэтому для решения поставленной задачи используется условие принадлежности точки поверхности: если точка принадлежит поверхности, то она принадлежит некоторой линии этой поверхности.
Поэтому для определения одной из недостающих проекций в таких случаях через точку A, принадлежащую поверхности q, проводят какую-либо характерную линию поверхности, определение проекций которой не вызывает трудностей. Как правило, в качестве такой линии принимают образующую а и параллель h, хотя и не исключают применения и других линий.
Рассмотрим ряд примеров по определению недостающих проекций точек и линий, принадлежащих наиболее распространенным поверхностям.
studopedia.su - Студопедия (2013 - 2025) год. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав!Последнее добавление
 В ряде случаев одна и та же поверхность может быть образована различными путями. Например, прямой круговой цилиндр может быть образован вращением прямолинейной образующей вокруг параллельной ей оси, путем поступательного перемещения некоторой окружности (при этом ее центр перемещается вдоль некоторой оси i, а ее плоскость все время остается перпендикулярной этой оси), путем поступательного перемещения сферы вдоль некоторой оси i (при этом центр сферы все время перемещается вдоль оси) и др.
В ряде случаев одна и та же поверхность может быть образована различными путями. Например, прямой круговой цилиндр может быть образован вращением прямолинейной образующей вокруг параллельной ей оси, путем поступательного перемещения некоторой окружности (при этом ее центр перемещается вдоль некоторой оси i, а ее плоскость все время остается перпендикулярной этой оси), путем поступательного перемещения сферы вдоль некоторой оси i (при этом центр сферы все время перемещается вдоль оси) и др.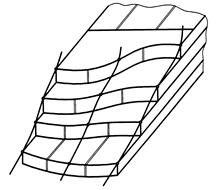
 Циклическая поверхность (рис. 135) образуется при помощи окружности а, центр которой перемещается по криволинейной направляющей m. При этом диаметр окружности монотонно изменяется.
Циклическая поверхность (рис. 135) образуется при помощи окружности а, центр которой перемещается по криволинейной направляющей m. При этом диаметр окружности монотонно изменяется.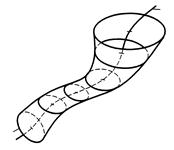
 Нелинейчатые поверхности с образующей постоянного вида могут быть описаны определителем типа
Нелинейчатые поверхности с образующей постоянного вида могут быть описаны определителем типа