КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Асинхронные методы замены контекста
|
|
|
|
Супервизор.
Это часть управляющей программы, координирующая распределение ресурсов вычислительной системы.
Особенности:
1) при ее вызове осуществляется проверка прав доступа к данной функции;
2) замена контекста более глубокая, чем при вызове процедуры (изменяет все слово состояния);
3) при некоторых вызовах не всегда возвращается в точку вызова;
4) новый режим (контекст) определяется в зоне памяти, не доступной для пользователя.
Эти методы основаны на использовании прерываний, и самое распространенное – прерывание по таймеру.
 | |||
 | |||
Прерывания – это обычные подпрограммы.
Слово прерывание представляет довольно неудачную, на взгляд авторов, кальку с англоязычного термина interrupt (существительное от глагола прервать).
Прерывания, вызванные внутренними событиями, часто называют исключениями (exceptions). Мы далее будем разделять эти два понятия, то есть внешние прерывания будем называть просто прерываниями, а внутренние - исключениями. Исключения возникают при делении на ноль, неопределенном коде команды, ошибках обращения к памяти и т.д. Реализации прерываний и исключений у разных процессоров немного отличаются.
Для примера рассмотрим организацию прерываний в машинах семейства PDP-11. Машины данной архитектуры сейчас почти не используются, но ряд архитектурных решений не потерял актуальности и поныне. В частности, подход к реализации прерываний считается классическим.
Процессоры семейства PDP-11 различают 128 типов прерываний и исключений. Каждому типу соответствует процедура - обработчик. Адреса точек входа всех процедур собраны в таблицу, называемую таблицей векторов прерываний. Эта таблица занимает 256 слов физической памяти, начиная с нулевого адреса. Каждый элемент таблицы (вектор) содержит адрес обработчика и новое слово состояния процессора. Ниже будет объяснено, для чего это сделано.
Процессор узнает о возникновении прерывания, если на один из входов запроса прерывания подан сигнал. Обычно этот сигнал генерируется одним из внешних устройств. Например, прерывание может сигнализировать о завершении операции перемещения головки дисковода, и т.д. Каждый вход соответствует определенному уровню приоритета. PDP-11 имеет восемь уровней приоритета прерывания. Прерывание происходит только когда уровень приоритета процессора ниже приоритета запрашиваемого прерывания. Если у процессора установлен приоритет 7, внешние прерывания запрещены. Приоритет процессора задается его словом состояния Получив запрос, процессор завершает исполнение текущей команды и выставляет сигнал готовности к прерыванию. После этого внешнее устройство выставляет на шине данных номер вектора прерывания.
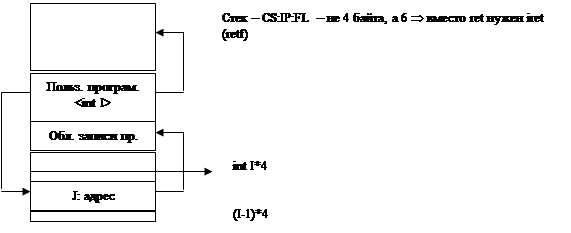
Процессор считывает номер и вызывает соответствующую процедуру из таблицы. При этом вызов обработчика прерывания отличается от вызова обычной процедуры: при обычном вызове в стеке сохраняется только адрес команды, на которую следует возвратить управление. При прерывании же в стеке сохраняются два значения: адреса команды и слова состояния процессора. Новое слово состояния берется из таблицы векторов.
При завершении процедуры обработки вызывается команда RTI (ReTurn from Interrupt - возврат из прерывания). Эта команда выталкивает из стека адрес прерванной команды и старое слово состояния, тем самым восстанавливая приоритет процессора.
Для сравнения: в процессорах семейства i80x86 вектор прерывания содержит только адрес программы-обработчика, а приоритет процессора задается не словом состояния процессора, а регистром внешнего устройства - контроллера прерываний. Контроллер прерываний обычно устанавливает приоритет равным приоритету прерывания, обрабатываемого в данный момент Чтобы повысить или понизить этот уровень, обработчик прерывания должен программировать контроллер. Перед завершением обработчика необходимо вернуть контроллер прерываний в исходное состояние, выполнив над ним серию магических команд - эпилог прерывания.
Обработка прерываний в системах с виртуальной памятью несколько усложняется: ведь кроме адреса обработчика нам надо еще задать адресное пространство, в котором этот адрес определен.
В моделях PDP-11, имеющих диспетчер памяти, эта проблема решается просто: для процессора в каждый момент времени заданы два адресных пространства: пользовательское и системное.. Все прерывания обрабатываются в системном адресном пространстве.
В защищенном режиме процессоров i80x86 использован более гибкий механизм установки адресного пространства для обработчика. По существу, с каждым обработчиком может быть ассоциировано свое виртуальное адресное пространство. О способе, которым это достигается, лучше прочитать в литературе по соответствующим процессорам.
Исторически первым методом сообщения системе о внешнем событии является аппаратное прерывание. Идея прерывания состоит в том, чтобы в момент события вызывать некоторую подпрограмму, которая и выполнит действия по обработке события.
Слово прерывание представляет довольно неудачную, на взгляд авторов, кальку с англоязычного термина interrupt (существительное от глагола прервать).
Прерывания, вызванные внутренними событиями, часто называют исключениями (exceptions). Мы далее будем разделять эти два понятия, то есть внешние прерывания будем называть просто прерываниями, а внутренние - исключениями. Исключения возникают при делении на ноль, неопределенном коде команды, ошибках обращения к памяти и т.д.
Реализации прерываний и исключений у разных процессоров немного отличаются.
Для примера рассмотрим организацию прерываний в машинах семейства PDP-11. Машины данной архитектуры сейчас почти не используются, но ряд архитектурных решений не потерял актуальности и поныне. В частности, подход к реализации прерываний считается классическим.
Процессоры семейства PDP-11 различают 128 типов прерываний и исключений. Каждому типу соответствует процедура - обработчик. Адреса точек входа всех процедур собраны в таблицу, называемую таблицей векторов прерываний. Эта таблица занимает 256 слов физической памяти, начиная с нулевого адреса. Каждый элемент таблицы (вектор) содержит адрес обработчика и новое слово состояния процессора. Ниже будет объяснено, для чего это сделано.
Процессор узнает о возникновении прерывания, если на один из входов запроса прерывания подан сигнал. Обычно этот сигнал генерируется одним из внешних устройств. Например, прерывание может сигнализировать о завершении операции перемещения головки дисковода, и т.д.
Каждый вход соответствует определенному уровню приоритета. PDP-11 имеет восемь уровней приоритета прерывания. Прерывание происходит только когда уровень приоритета процессора ниже приоритета запрашиваемого прерывания. Если у процессора установлен приоритет 7, внешние прерывания запрещены. Приоритет процессора задается его словом состояния.
Получив запрос, процессор завершает исполнение текущей команды и выставляет сигнал готовности к прерыванию. После этого внешнее устройство выставляет на шине данных номер вектора прерывания.
Процессор считывает номер и вызывает соответствующую процедуру из таблицы. При этом вызов обработчика прерывания отличается от вызова обычной процедуры: при обычном вызове в стеке сохраняется только адрес команды, на которую следует возвратить управление. При прерывании же в стеке сохраняются два значения: адреса команды и слова состояния процессора. Новое слово состояния берется из таблицы векторов.
При завершении процедуры обработки вызывается команда RTI (ReTurn from Interrupt - возврат из прерывания). Эта команда выталкивает из стека адрес прерванной команды и старое слово состояния, тем самым восстанавливая приоритет процессора.
Для сравнения: в процессорах семейства i80x86 вектор прерывания содержит только адрес программы-обработчика, а приоритет процессора задается не словом состояния процессора, а регистром внешнего устройства - контроллера прерываний. Контроллер прерываний обычно устанавливает приоритет равным приоритету прерывания, обрабатываемого в данный момент. Чтобы повысить или понизить этот уровень, обработчик прерывания должен программировать контроллер. Перед завершением обработчика необходимо вернуть контроллер прерываний в исходное состояние, выполнив над ним серию магических команд - эпилог прерывания.
Обработка прерываний в системах с виртуальной памятью несколько усложняется: ведь кроме адреса обработчика нам надо еще задать адресное пространство, в котором этот адрес определен.
В моделях PDP-11, имеющих диспетчер памяти, эта проблема решается просто: для процессора в каждый момент времени заданы два адресных пространства: пользовательское и системное. Все
прерывания обрабатываются в системном адресном пространстве.
В защищенном режиме процессоров i80x86 использован более гибкий механизм установки адресного пространства для обработчика. По существу, с каждым обработчиком может быть ассоциировано свое виртуальное адресное пространство. О способе, которым это достигается, лучше прочитать в литературе по соответствующим процессорам, например [18].
Аналогичное прерываниям средство реализовано в ряде ОС - например, в UNIX - для чисто программных событий. Это средство называется сигналами и используется для обработки исключительных ситуаций и, в некоторых случаях, для межпроцессной коммуникации Сигналы в UNIX часто используются для принудительного завершения программы, и даже команда посылки сигнала называется kill - убить Легко видеть, что прерывания и сигналы могут служить для оповещения программы о событии, но не решают ни одной из проблем, перечисленных в разделе 4.2., а напротив, создают их. Действительно, подпрограмму обработки прерывания во многих отношениях можно рассматривать как параллельно исполняемый процесс, и к ней вполне приложимо все, что сказано в предыдущем разделе.
К счастью, аппаратные реализации позволяют запрещать все или некоторые прерывания, и мы можем решить таким образом проблему критической секции или даже доступа к нереентерабельной процедуре. Однако, такое решение часто оказывается неудовлетворительным или просто нереализуемым. Например, в системах реального времени нельзя запрещать прерывания надолго. Поэтому программа обработчика прерывания в плохо спроектированной ОС, в ДОС или на "голой" машине часто вынуждена заниматься тонкой игрой аппаратными уровнями прерывания. Такая игра доставляет много удовольствия молодым хакерам, но может приводить к тонким и очень труднообнаружимым ошибкам.
Эти ошибки состоят в неправильном определении границ критических секций. Они очень плохо воспроизводятся при тестировании, потому что для срабатывания ошибки необходимо возникновение прерываний в строго определенной последовательности и в заданные относительные моменты времени. Поймать такую ошибку под интерактивным отладчиком практически невозможно.
Кроме того, программу, работающую совместно с процедурами обработки прерываний, нельзя представить в виде детерминированного конечного автомата. Это усложняет анализ алгоритмов и доставило в свое время много волнений теоретикам программирования. Например, в [7] Дийкстра очень эмоционально описывает свою реакцию при первом столкновении с системой, использующей прерывания.
С практической точки зрения, наиболее серьезным недостатком прерываний является то, что прерывания предоставляют только механизм сообщения программе о том, что какое-то событие произошло.
Но как программа узнает, что события еще не происходило?
Действительно, вернемся к примеру из предыдущего раздела: программа A производит данные, а программа B их потребляет. Наиболее простым решением было бы объединить эти программы в один процесс. Тогда программа A, произведя очередную порциюданных, вызывала бы программу B, и ждала бы, пока та пережует эту порцию. Или наоборот, программа B, обнаружив, что ей нужны очередные данные, вызывала бы программу A. Понятно, что в этом случае мы отказываемся от всех преимуществ многопроцессности.
Если мы хотим, чтобы программы A и B исполнялись параллельно, программа B должна быть способна узнать, что очередная порция данных готова. Например, мы можем создать флаг, который равен нулю, если данные не готовы, и единице, если готовы. Тогда модель взаимодействия выглядит так:
- Программа B, когда ей нужны очередные данные, проверяет флаг Если флаг равен 1, данные готовы. Если не равен, то нужно заснуть до получения сигнала.
- Программа A, подготовив очередную порцию данных, посылает сигнал программе B.
- Обработчик сигнала устанавливает флаг в 1 и возобновляет выполнение программы B.
3 типа прерываний:
1) документированные;
2) недокументированные;
3) свободные.
1) – перечислены во всех справочниках и т.д.; они гарантируют свою работу (т.е. то, что положено получить по справочнику, то мы и получим);
2) – не дают гарантии; иногда работают хорошо, а иногда – плохо; т.е. зависят от состояния машины;
3) – используются для нужд пользователя и не влияют на состояние работы ЭВМ (MS Windows “нахватал” их себе в достаточном количестве); т.е. поработали, затем отпустили.
Примечания:
Обработчики прерываний, написанные пользователем фактически являются подпрограммами и пишутся по общим правилам, но имеют некоторые особенности:
а) это процедуры дальнего вызова, т.е. имя_процедуры far;
б) выталкиваются при помощи iret или retf, т.е. выталкиваются 6 байт вместо 4-ех (как для ближнего вызова, где используется уже ret);
в) для аппаратных прерываний есть несколько дополнений, суть которых заключается в перепрограммировании микросхемы PIC, отвечающей за прерывания, которая, в свою очередь, перепрограммируется через порт 20h, т.е.:
mov al, 20h; только для аппаратных прерываний
out 20h, al; 20h – чистой воды совпадение, не более того
! У таймера наивысший приоритет (0).
Схема использования прерывания 61h:
1.
|
2. запоминание адреса 61h ® int 61h;
3. int 08h ® 61h;
4. 08h ¬ связываем свой обработчик прерываний.
Переключение можно осуществлять, исходя из:
Счетчик mod n, где n – число процессов, т.е. если остаток от деления равен 0 Þ 1®2, если 1 Þ 2®3, если 2 Þ 3®1.
|
|
|
|
Дата добавления: 2013-12-13; Просмотров: 1238; Нарушение авторских прав?; Мы поможем в написании вашей работы!