КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Открытые - если есть звенья, входящие только в одну КП
|
|
|
|
(Рисунок 23. а, б).
Закрытые - каждое звено входит по крайней мере в 2 КП
(Рисунок 1.23 в).
3) Плоские и пространственные (аналогично КП).
Число степеней свободы кинематической цепи относительно одного из ее звеньев называют степенью ее подвижности. Степень подвижности является структурной характеристикой КЦ и механизмов в целом. Если число подвижных звеньев - n, то общее число степеней свободы до соединения звеньев в КП равно 6n. Звенья соединяются между собой и со стойкой в КП различных классов, при этом у КЦ отнимаются степени свободы в зависимости от класса КП.
Тогда общее число степеней свободы:

получим степень подвижности или структурную формулу КЦ общего вида (формула П.И. Сомова – А.П. Малышева). Где Р5, Р4, Р3, Р2, Р1 -число КП соответственно V, IV, III, II и I классов.
В плоских механизмах из шести возможных движений 3 не могут быть осуществлены: одно поступательное, перпендикулярное плоскости механизма и два вращательных вокруг двух осей, определяющих эту плоскость.
Тогда  - Формула Малышева А.П. для определения степени подвижности плоского механизма.
- Формула Малышева А.П. для определения степени подвижности плоского механизма.
В состав плоского механизма КП I, II, III классов входить не могут, как обладающие пространственным характером возможных относительных движений.
1.6.4 Общая классификация механизмов.
Механизм - это система соединенных между собой звеньев КЦ, одно из которых неподвижное - стойка, предназначенная для преобразования движения одного или нескольких звеньев, в требуемое движение других звеньев. Звенья, к которым приложены силы, приводящие механизм в движение, называют ведущими. Все остальные звенья, преобразующие движение ведущего звена, называются ведомыми (рабочими, исполнительными).
|
|
По функциональному назначению все механизмы разделяются на 2 основные группы: 1 группа - механизмы, преобразующие один вид движения в другой (вращательное в возвратно-поступательное); 2 группа - механизмы, преобразующие лишь параметры движения (передачи вращательных движений ведущего и ведомого звеньев).
Рис 25.
К 1 группе относятся:
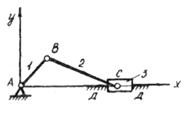
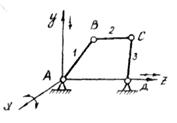
а) Рычажные механизмы. Степень подвижности:
 Если ось х. проведенная через центр вращения звена I (А), проходит через центр движения ползуна 3 (Рисунок 25) или вращения шатуна 3 (Рисунок 27) механизм называют центральным или аксиальным, в противном случае - дезаксиальным.
Если ось х. проведенная через центр вращения звена I (А), проходит через центр движения ползуна 3 (Рисунок 25) или вращения шатуна 3 (Рисунок 27) механизм называют центральным или аксиальным, в противном случае - дезаксиальным.
В рассмотренных механизмах траектории движения точек всех звеньев лежат в параллельных плоскостях, поэтому механизмы называются плоскими. В пространственных рычажных механизмах указанные траектории либо представляют собой пространственные кривые, либо находящиеся в непараллельных плоскостях.
|
|
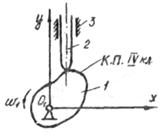
б) Кулачковые механизмы. Механизм, в состав которого входит кулачок, называется кулачковым механизмом. Предназначены для преобразования вращательною движения ведущего звена I в возвратно – поступательное движение ведомого звена 2 (толкатель) с остановками последнею заданной продолжительности (Рисунок 26). I - кулачок; 2 - толкатель: 3 - стойка или направляющая. Степень подвижности:  .
.
Рис 26. Рис 27.
в) Винтовые механизмы, содержащие винт и гайку (домкрат). Функциональность движение винта считается за одно движение 
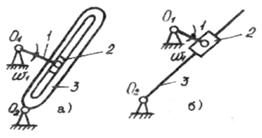
г) Кулисные механизмы (Рисунок 27). Кулисой называется подвижное звено 3, являющееся подвижной направляющей ползуна 2; 1 - кривошип, 2 - ползун, 3 - кулиса.
д) Зубчато-реечные механизмы (Рисунок 29) 1 - шестерня; 2 - рейка.
 .
.

Рис 29.
Ко второй группе механизмов относятся передачи вращательного движения.
Классификация передач. Передачи классифицируются:
1) В зависимости от способа передачи движения:
а) передачи трением;
б) передачи зацеплением.
2) В зависимости от расположения основных элементов:
а) непосредственным контактом;
|
|
б) с промежуточной гибкой связью.
Рис 30. Рис 31.
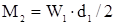
Примеры: а) фрикционные передачи относятся к передачам с непосредственным контактом. Простейшая фрикционная передача с параллельными осями состоит из двух колес (катков) цилиндрической формы 1 и 2 и стойки 3 (Рисунок 30).
Нажимное устройство 4 обеспечивает силовое замыкание высшей кинематической пары IV кл. (линия). Контакт двух катков по линии - это КП IV класса. Движение от звена 1 к звену 2 осуществляется за счет сил трения. Степень подвижности:
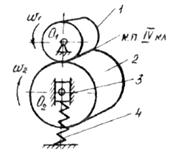
б) зубчатые передачи - относятся к передачам зацеплением, в состав которых входят зубчатые звенья, т.е., звенья имеющие выступы (зубья). При передаче движения зубья одного звена взаимодействуют с зубьями другого звена. Вращающееся звено называется зубчатым колесом.
На схеме механизма зубчатые колеса 1 и 2 изображаются окружностями, которые перекатываются без скольжения (Рисунок 31) меньшее - шестерня, большее - колесо. Понятие зубчатое колесо относится к обоим колесам. Соединение двух зубьев по линии это КП IV класса. Степень подвижности:
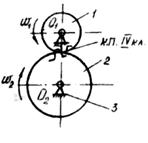
в) передачи с гибкими связями применяются для передачи движения при больших расстояниях между валами. В зависимости от типа гибкого звена передача называется ременной (Рисунок 32), канатной или цепной (Рисунок 33)
|
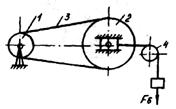
Рис 32. Рис 33.
1,2- шкивы (звездочки): ведущая и ведомая; 3 - гибкое звено (ремень, цепь); 4 - натяжное устройство. Степень подвижности:
3) В зависимости от расположения осей валов передачи бывают:
а) с параллельными осями - цилиндрические (фрикционная или зубчатая);
б) с пересекающимися осями - конические фрикционные или зубчатые.
Степень подвижности:
в) со скрещивающимися осями – червячная передача подвижности:
4) В зависимости от расположения основных звеньев:
а) с внутренним контактом;
б) с внешним контактом.
5) В зависимости от характера движения осей валов:
а) простые;
б) дифференциальные;
в) планетарные.
В двух последних передачах ось хотя бы одного колеса перемещается в пространстве. Это колесо называется сателлитом.
Элементарный дифференциальный механизм - это 4-х звенный механизм, обладающий двумя степенями подвижности (XV = 2) и включающий 3 КП V класса и одну КП IV класса (Рисунок 1.36):
1 - зубчатое колесо;
2 - сателлит;
3 - водило;
4 - стойка.

|
Степень подвижности:  . Планетарный механизм с внешним зацеплением отличается от дифференциального тем, что зубчатое колесо - I неподвижно (Рисунок 37).
. Планетарный механизм с внешним зацеплением отличается от дифференциального тем, что зубчатое колесо - I неподвижно (Рисунок 37).
Рис 37.
|
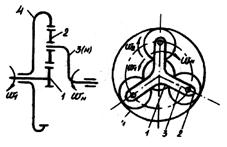
Степень подвижности: . Планетарный механизм с внутренним зацеплением (Рисунок 38):
Рис 38.
1 - шестерня;
2 - сателлит;
3 - водило (И);
4 - колесо с внутренними зубьями.
Степень подвижности:

б) В зависимости от количества передач водном механизме передачи бывают:
а) простые (одноступенчатые);
б) сложные (многоступенчатые) (Рисунок 39).
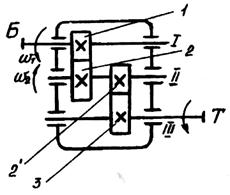
Рис 39.
Например, двухступенчатая передача 1-2 передача с 1 на И вал:
- 1-я ступень, 2-3 передача со 11 на III вал - 2-я ступень.
Если W1 > W3 - передача понижающая (редуктор).
Если W1< W 3 - передача повышающая (мультипликатор).
i1,2 = W1/W2 передаочное отношение.
Если изменение скорости ведомого вала происходит ступенчато, то механизм называется коробкой передач.
Если изменение скорости ведомого вала происходит плавно на ходу при W = соnst - то механизм называется вариатор.
7) По конструктивному признаку:
а) закрытые передачи (находящиеся в плотно закрытом корпусе);
б) полузакрытые передачи;
в) открытые передачи.
| Рисунок КП | Услов. обозн. | Элем. кинем. пары | Кол – во движ. поступ. вращат | Общ. кол. Огр. движ. | Класс КП | Примечание |
   


| 





| Точка Линия Плоскость Поверхносьть, сфера Цилинд. поверхность Цилинд. поверхность | 2 1 3 - 2 1 2 1 2 1 1 2 - 3 3 - 1 2 1 2 - 3 1 2 1 2 - 3 | I II III III IV V V | Высшая КП Высшая КП Низшая КП Сферическ. шарнир Цилиндрич. пара Вращательн. пара |
1.1 Динамическая модель механизма.
1.7.1 Общие сведения.
В динамике механизмов изучается их движение с учетом действующих сил.
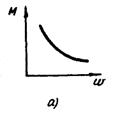
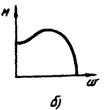
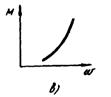
На рисунке 1.40 а – в представлены механические характеристики электродвигателей постоянного тока последовательного возбуждения (Рисунок. 40. а) и асинхронного (Рисунок 40. б), а на рисунке 40. в - характеристики вентилятора в зависимости от скорости.
|
|
|
Эти характеристики получаются либо путем расчета, либо строятся по экспериментальным данным.
Рис 40.
Если все приложенные к звеньям силы известны, то можно определить закон движения какого-либо звена и механизма. Однако практическое решение этой задачи оказывается весьма сложным. Поэтому, как правило, прибегают к отдельным частным решениям, применяя способы приближенного определения движения механизма. Для этого с ложный многозвенный механизм заменяют его динамической моделью. Если механизм имеет только одну степень свободы, то в качестве модели механизма принимают одно условное звено. Так, для системы двигатель внутреннего сгорания (ДВС) - рабочая машина выбирают в качестве начального звена коленчатый вал ДВС. Закон движения условного звена должен полностью совпадать с законом движения начального звена. При этом угловые скорости начального и условного звеньев должны быть равны.
При построении модели механизма все силы и моменты, действующие на его звенья, должны быть приведены к одному звену, называемому приведенным, и заменены приведенной силой или приведенным моментом.
Таким же образом массы всех звеньев приводят к одному звену и сменяют суммарным приведенным моментом инерции, который эквивалентен всей инерции механизма. В итоге заданный многозвенный механизм, нагруженный сложной системой сил и моментом, заменяют простой моделью, состоящей из одного приведенного момента. Причем, при приведении сил должно соблюдаться равенство элементарных работ, а при приведении масс - равенство кинетических энергий.
1.7.2 Приведение сил и моментов сил.
|
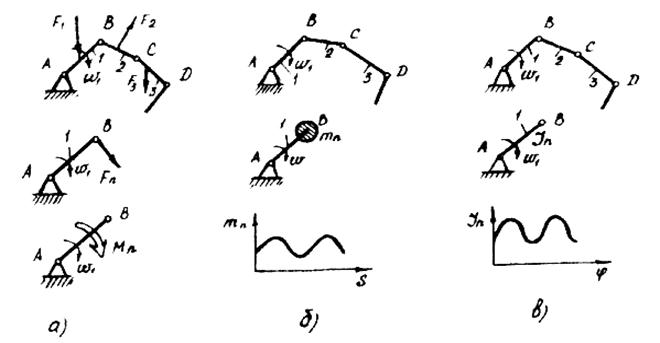
Если плоский механизм состоит из n - звеньев и на каждое из них действуюn силы и моменты сил, то всех их можно привести к одному звену, которое называется звеном приведения. При этом должно соблюдаться условие, чтобы мощность (или работа), развиваемая на элементарном перемещении приведенной силой или приведенным моментом силы, была равна сумме мощностей (или работ) всех сил и моментов, приложенных к n - звеньям. На рисунке41. а приведена схема механизма и приведения 1.
Сформулированное условие для мощности в общем виде имеет вид  i = 1, 2, 3 … - номер звена механизма.
i = 1, 2, 3 … - номер звена механизма.
При приведении к силе имеем: Pп = Fпvв;

где vв - скорость точки приложения приведенной силы; F - сила, действующая на i-е звено; v - скорость точки I -го звена, в котором действует сила F; α1 - угол между векторами силы и скорости I -го звена; М - момент силы, действующий на i -е звено;
ω1 - угловая скорость i -го звена. Тогда
 .
.
Аналогично определяем приведенный момент силы звена приведения 
Принимая во внимание уравнение, имеем
 .
.
1.7.3 Кинетическая энергия механизма.
Кинетическая энергия механизма, состоящего из n звеньев, определяется из соотношения:

где  - кинетическая энергия i-го звена при его поступательном движении со скоростью vi;
- кинетическая энергия i-го звена при его поступательном движении со скоростью vi;  - кинетическая энергия i-го звена при его вращательном движении: mi - масса i-го звена, сосредоточенная в центре масс; Ji - момент инерции i-го звена относительно оси, проходящей через центр масс.
- кинетическая энергия i-го звена при его вращательном движении: mi - масса i-го звена, сосредоточенная в центре масс; Ji - момент инерции i-го звена относительно оси, проходящей через центр масс.
1.7.4 Приведение масс и моментов инерции.
Каждое i-е звено механизма обладает массой m1, сосредоточенной в центре масс звена, и моментом инерции Ji относительно оси, проходящей через центр масс. Эти массы и моменты инерции можно заменить приведенной массой mp, сосредоточенной в точке В звена приведения 1 (Рисунок 41. б) или приведенным моментом инерции Jп звена приведения 1 (Рисунок 41. в).
Приведение масс и моментов инерции производится из условия равенства кинетических энергий. Кинетическая энергия приведенной массы, сосредоточенной в точке В звена приведения 1, равна  , должна равняться сумме кинетических энергий всех звеньев, т. е.
, должна равняться сумме кинетических энергий всех звеньев, т. е.

Отсюда найдем

В формулах отношения скоростей не зависят от действительных скоростей механизма, но зависят от положения механизма и положения его звеньев, включая и звено приведения. Следовательно, приведенная масса и приведенный момент инерции являются функциями только положения звена приведения. Если звено приведения совершат поступательное движение, то mп = f(s), а если вращательное, Jп = f(φ). Для большого класса механизмов mп и Jп являются постоянными величинами (зубчатые механизмы, турбины, компрессоры и др.). Когда передаточное отношение в механизме не меняется (зубчатые и другие механизмы), приведенный момент инерции остается постоянным, а его значение - всегда положительно. Гак как отношения скоростей отдельных точек механизма зависят только от его положения, то приведенный момент инерции не зависит от скорости движения механизма.
|
|
|
|
|
Дата добавления: 2013-12-14; Просмотров: 397; Нарушение авторских прав?; Мы поможем в написании вашей работы!