КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Структурний синтез механізму
|
|
|
|
СТРУКТУРНА КЛАСИФІКАЦІЯ
Тема 1.3.
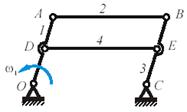
Однією з розповсюджених класифікацій плоских шарнірних механізмів з парами  -го класу є структурна класифікація, запропонована І.І.Артоболевським на основі ідей А.В.Ассура. Відповідно до цієї класифікації механізми поєднуються в класи від першого й вище згідно структурних ознак. Механізм першого класу складається із ведучої ланки та стійки, з'єднаних кінематичною парою п'ятого класу; механізми більш високих класів утворюються послідовним приєднанням до механізму першого класу кінематичних ланцюгів, що не змінює ступеня рухливості цього вихідного механізму, тобто таких, які мають ступінь рухливості, рівній нулю. Ланки й зв'язки, які входять до складу механізму, але не впливають на його кінематику називаються пасивними або зайвими (рис. 1.9).
-го класу є структурна класифікація, запропонована І.І.Артоболевським на основі ідей А.В.Ассура. Відповідно до цієї класифікації механізми поєднуються в класи від першого й вище згідно структурних ознак. Механізм першого класу складається із ведучої ланки та стійки, з'єднаних кінематичною парою п'ятого класу; механізми більш високих класів утворюються послідовним приєднанням до механізму першого класу кінематичних ланцюгів, що не змінює ступеня рухливості цього вихідного механізму, тобто таких, які мають ступінь рухливості, рівній нулю. Ланки й зв'язки, які входять до складу механізму, але не впливають на його кінематику називаються пасивними або зайвими (рис. 1.9).
|
| Рис. 1.9 Приклад пасивної ланки |
Структурна схема – це умовне зображення механізму, що містить стійку, рухливі ланки і кінематичні пари, на якому показано їхнє взаємне розташування без урахування співвідношень розмірів ланок.
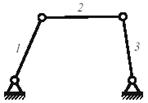
Найпростіший початковий механізм – це такий механізм, подальший поділ якого на складові неможливий без порушення його основної функції – передачі руху (рис. 1.10).

| 
|
| Рис. 1.10 Початковий механізм |
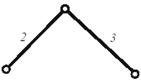
До найпростішого механізму приєднуються структурні групи, так звані групи Ассура (рис. 1.11).

| + | 
| = | 
|
| Рис. 1.11 |
Структурною групою або групою Ассура називається відкритий кінематичний ланцюг, ступінь свободи якого, щодо елементів зовнішніх кінематичних пар дорівнює нулю. При цьому група не повинна розкладатися на більш прості, які відповідали б цій умові.
За Ассуром до груп I й II класів відносяться такі, які не мають контурів, що змінюються, і відрізняються тим, що групи II класу виключають базисні ланки, які з’єднуються також з іншими базисними ланками. Групи III класу мають один контур, що змінюється, IV – два контури, що змінюється. Порядок групи визначається числом повідців.
За Артоболевським клас групи визначається числом шарнірів у найбільш складному замкнутому контурі, порядок групи визначається кількістю шарнірів, якими группа приєднується до механізму. Групи II класу 2 порядку запропоновано поділити на 5 видів.

| 
| 
| 
| 
|
| вид 1 | вид 2 | вид 3 | вид 4 | вид 5 |
Порядок і клас механізму визначається порядком і класом найбільш складної структурної групи, яка входить до складу механізму.
Лекція 3. Тема 2.
КІНЕМАТИЧНИЙ АНАЛІЗ МЕХАНІЗМІВ
Кінематика – це розділ механіки, що вивчає закони руху матеріальних точок і твердих тіл без урахування причин, що викликають цей рух. При аналізі розглядається існуючий механізм і вивчаються його кінематичні характеристики, до яких відносяться: координати та траєкторії руху точок, узагальнені координати ланок, переміщення точок і ланок, їхні швидкості та прискорення а також функції положення і передавальні функції механізму.
Синтез – створення механізму із заданими кінематичними характеристиками. Існує три основних методи дослідження: метод планів, метод кінематичних діаграм, аналітичний метод.
|
|
|
|
Дата добавления: 2013-12-14; Просмотров: 355; Нарушение авторских прав?; Мы поможем в написании вашей работы!