КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Визначення швидкостей ланок
|
|
|
|
Лекція 4. Тема 2.2.
Планом швидкостей механізму називається векторна діаграма, на якій зображені у вигляді відрізків вектори, однакові по модулю і напрямку з швидкостями різних точок ланок механізму в даний момент часу.
Побудова планів швидкостей проводиться на основі послідовного складання векторних рівнянь для всіх груп, що входять до складу механізму, починаючи із ведучої ланки. Спочатку потрібно вибрати загальну для двох ланок точку та записати для неї два рівняння для визначення її швидкості. Для визначення повної картини швидкостей будь-якої ланки, що входить у групу, досить знати лінійну швидкість двох точок цієї ланки або лінійну швидкість однієї точки й кутову швидкість ланки.
У методі планів швидкостей і прискорень використовується теорема про складний рух твердого тіла, який можна представити як суму переносного та відносного руху (рис.2.3 а).

Переносний рух - рух рухомої системи відліку ( рис. 2.3.а) відносно нерухомої системи відліку (
рис. 2.3.а) відносно нерухомої системи відліку ( рис. 2.3.а). Відносний рух – рух матеріальної точки відносно рухомої системи відліку (на рис.2.3 а, рух точки А відносно системи координат ). У будь-який момент часу можна знайти точку, жорстко пов'язану з тілом, швидкість якої дорівнює нулю. Це миттєвий центр обертання тіла або полюс
рис. 2.3.а). Відносний рух – рух матеріальної точки відносно рухомої системи відліку (на рис.2.3 а, рух точки А відносно системи координат ). У будь-який момент часу можна знайти точку, жорстко пов'язану з тілом, швидкість якої дорівнює нулю. Це миттєвий центр обертання тіла або полюс  (рис. 2.3.б). Якщо тіло рухається поступально то миттєвий центр обертання лежить на
(рис. 2.3.б). Якщо тіло рухається поступально то миттєвий центр обертання лежить на  . Відносно цієї точки в даний момент часу тіло здійснює обертовий рух зі швидкістю
. Відносно цієї точки в даний момент часу тіло здійснює обертовий рух зі швидкістю  .
.

| 
| 
|
| а | б | в |
| Рис. 2.3 |
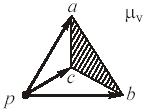
Перенесемо вектори абсолютних швидкостей  та
та  в точку
в точку  -полюс плану швидкостей (рис. 2.3 в).
-полюс плану швидкостей (рис. 2.3 в).
Одержимо план швидкості відрізка АВ у масштабі:


Для визначення швидкості точки С можна записати наступну систему:
 .
.
Припустимо, що ця швидкість відома, тоді
 .
.
З іншого боку
 ;
;  ;
; 
 або
або
 .
.
З'єднані між собою кінці векторів абсолютних швидкостей утворюють фігуру, подібну до ланки та повернену до неї на кут  .
.
Властивості планів швидкостей:
1. Вектори, які виходять із полюса, є абсолютними швидкостями.
2. Напрямок вектора - завжди від полюса.
3. На кінці вектора завжди точка, що відповідає швидкості точки ланки або кінематичної пари.
4. Вектори на планах швидкостей, які не проходять через полюс, є відносними швидкостями.
5. Напрямок відносних швидкостей на плані завжди від другого індексу до першого.
|
|
|
|
|
Дата добавления: 2013-12-14; Просмотров: 414; Нарушение авторских прав?; Мы поможем в написании вашей работы!