КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Рух механізму під дією заданих сил
|
|
|
|
Режими руху:
- стадія пуску – швидкість руху ведучої ланки зростає від 0 до max. Робота рушійних сил більша роботи сил опору ( );
);
- стадія сталого руху – швидкість руху ведучої ланки стабілізувалась, робота рушійних сил дорівнює роботі сил опору за цикл навантаження ( , в окремі моменти циклу
, в окремі моменти циклу  );
);
- стадія вибігу (зупинки) – швидкість руху ведучої ланки спадає, робота рушійних сил менша роботи сил опору ( ).
).
Зведення сил. При складанні рівнянь руху дії всіх сил і моментів сил, прикладених до різних ланок механізму, зручно умовно замінити дією тільки однієї сили або моменту, прикладених до якої-небудь ланки механізму. Такі сили й моменти сил одержали назву зведених, а ланки, до яких вони прикладені, ланками зведення. Робота зведеної сили або моменту на її можливому переміщенні дорівнює сумі робіт всіх сил, прикладених до ланок механізму на їхніх можливих переміщеннях.
Рівняння руху Лагранжа:
 ,
,
де  - кінетична енергія,
- кінетична енергія,  - узагальнена координата,
- узагальнена координата,  - узагальнена швидкість,
- узагальнена швидкість,  - потенційна енергія системи,
- потенційна енергія системи,  - узагальнена сила, що відповідає узагальненій координаті.
- узагальнена сила, що відповідає узагальненій координаті.
У випадку обертового руху.
 ,
,
 ,
,
 .
.
У випадку поступального руху.
 ,
,
 ,
,
 .
.
Вирази для визначення зведеної сили й моменту.
 ,
,
 ,
,
де ,
,  - поточні значення сил, що зводять, і моментів, що діють на ланки,
- поточні значення сил, що зводять, і моментів, що діють на ланки,  - лінійна швидкість ланки зведення;
- лінійна швидкість ланки зведення;  - кут між напрямком сили і її переміщенням;
- кут між напрямком сили і її переміщенням;  - кутова швидкість ланки зведення.
- кутова швидкість ланки зведення.
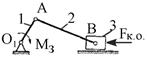
Розглянемо на прикладі кривошипно-шатунного механізму (рис. 3.1) метод визначення зведеного моменту.
|
| Рис. 3.1 |
|
| Рис. 3.2 |
Якщо знехтувати дією сил тертя, ваги, інерції та вважати, що кривошип 1 рухається рівномірно з постійною кутовою швидкістю  , то величину зведеного моменту, який прикладено в кожний момент часу до ланки 1 можна визначити згідно наступної залежності:
, то величину зведеного моменту, який прикладено в кожний момент часу до ланки 1 можна визначити згідно наступної залежності:
 , [H·м].
, [H·м].
де  - сила корисного опору,
- сила корисного опору,  - швидкість повзуна 3 в кожен момент часу.
- швидкість повзуна 3 в кожен момент часу.
Робота рушійних сил за цикл навантаження дорівнює роботі сил корисного опору  . При цьому
. При цьому
 .
.
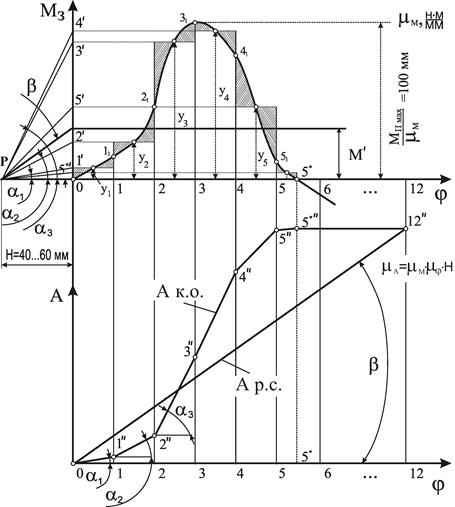
Для визначення зведеного моменту застосовуємо метод графічного інтегрування (рис. 3.2):
1. Розіб’ємо один оберт кривошипа  на n (n=12; 24) рівних частин таким чином, щоб рух в границях одного інтервалу можна було розглядати рівномірним.
на n (n=12; 24) рівних частин таким чином, щоб рух в границях одного інтервалу можна було розглядати рівномірним.
2. Заміняємо криволінійні трапеції  ;
;  ;… рівновеликими за площею прямокутниками зі сторонами 01 і у1; 12 і у2; 23 і у3; …
;… рівновеликими за площею прямокутниками зі сторонами 01 і у1; 12 і у2; 23 і у3; …
3. Кінці середніх ординат у1, у2, … проектують на вісь  й одержують точки
й одержують точки  ;
;  ;
;  ;…
;…
4. З’єднують їх з довільно обраним полюсом  променями Р; Р; Р;…
променями Р; Р; Р;…
5. На графіку робіт А проводять лінії  ;
;  ;
;  ;… паралельні променям Р; Р; Р;…. Перший відрізок проводять із початку координат до перетину з вертикальною віссю, що обмежує праворуч інтервал 0-1. Другий відрізок проводять із отриманої точки перетину з границею першого інтервалу до перетину з границею другого інтервалу 1-2 і т.д.
;… паралельні променям Р; Р; Р;…. Перший відрізок проводять із початку координат до перетину з вертикальною віссю, що обмежує праворуч інтервал 0-1. Другий відрізок проводять із отриманої точки перетину з границею першого інтервалу до перетину з границею другого інтервалу 1-2 і т.д.
6. З’єднують плавною кривою отримані точки. Отримана крива являється графіком роботи сил корисного опору ( ).
).
Точка  являється кінцем робочого ходу механізму, далі механізм не виконує корисної роботи, тому з цієї точки можна провести горизонтальну пряму до 12 положення механізму. Дванадцяте положення механізму співпадає з нульовим положенням (кривошип зробив один повний оберт). З’єднавши прямою точку, що відповідає 12 положенню з нульовим отримаємо графік робіт рушійних сил (
являється кінцем робочого ходу механізму, далі механізм не виконує корисної роботи, тому з цієї точки можна провести горизонтальну пряму до 12 положення механізму. Дванадцяте положення механізму співпадає з нульовим положенням (кривошип зробив один повний оберт). З’єднавши прямою точку, що відповідає 12 положенню з нульовим отримаємо графік робіт рушійних сил ( ). Цей графік утворює з віссю абсцисс кут
). Цей графік утворює з віссю абсцисс кут  . Відкладаємо із полюса Р на графіку зведеного моменту промінь під кутом та знаходимо точку його перетину з віссю ординат. Величина
. Відкладаємо із полюса Р на графіку зведеного моменту промінь під кутом та знаходимо точку його перетину з віссю ординат. Величина  (див. рис. 3.2) відповідає величині постійно діючого зведеного моменту
(див. рис. 3.2) відповідає величині постійно діючого зведеного моменту  , який прикладено до кривошипа
, який прикладено до кривошипа  . При цьому цей момент розвиває постійну потужність
. При цьому цей момент розвиває постійну потужність  .
.
|
|
|
|
Дата добавления: 2013-12-14; Просмотров: 290; Нарушение авторских прав?; Мы поможем в написании вашей работы!