КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 4. Система электродистанционного управления
|
|
|
|
Лекция 3. Управляющая часть системы управления
В функции управляющей части входят:
- создание на рычагах управления требуемых характеристик управляемости по усилиям и перемещениям;
- осуществление связи (механической, электрической или иной другой) между рычагами управления летчика и приводами рулей;
- формирование заданного закона управления самолетом на основе сигналов управления летчика и сигналов обратных связей от параметров движения самолета (α, ωz, ωх, ωу, ny);
- создание ограничений, затрудняющих непроизвольный вывод самолета летчиком на запредельные режимы полета;
- комплексирование сигналов различных автоматических систем самолета с последующей их отработкой на рули и др.
Все эти функции реализуются на основе применения электронных, электрических, гидравлических и механических целей и их исполнительных механизмов. Внедрение электроники в управляющую часть системы сделало управляющую часть более гибкой при реализации необходимых характеристик устойчивости и управляемости самолетом, а также при модификации системы управления в процессе эксплуатации самолета.
На первом этапе внедрения автоматизации в качестве комплексирующей системы использовалась механическая система управления. Применению МСУ способствовала высокая ее надежность, подтвержденная летной эксплуатацией. Возможности применения МСУ на перспективных самолетах затруднены по следующим причинам:
- использование для передачи управляющих сигналов МСУ с ее люфтами, упругостями, трением и другими нелинейностями при высоких требованиях к точности и быстродействию в отработке большого спектра управляющих сигналов от летчика и автоматических систем затрудняет обеспечение необходимого качества управления неустойчивым самолетом;
- для управления неустойчивым самолетом летником при сохранении МСУ между рычагом управления и РП требуется значительная корректировка выходного сигнала МСУ с помощью автоматической системы, чтобы сохранить для летчика привычный стереотип управления, свойственный устойчивому самолету. При отказе корректирующей автоматической системы управление самолетом, несмотря на исправность МСУ, становится практически невозможным без подключения аварийной СУУ на неэлектрических элементах. Поэтому в этом случае целесообразно использование резервированных электронных цепей (без МСУ), имеющих надежность эквивалентную надежности механической системы;
|
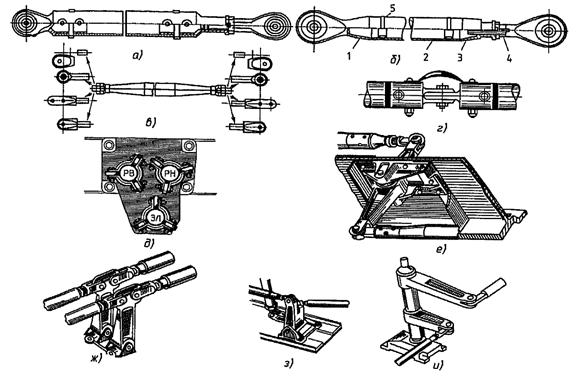
| Рис.1.5. Основные элементы механической проводки жесткого типа поступательного движения; а - цилиндрическая тяга с регулируемым наконечником; б - сварная тяга с коническими концами; в - комическая тяга с различными типами наконечников; г - типовое соединение жестких тяг; д - типовая установка роликовых направляющих тяг проводки; е - установка прямой качалки; ж - поводковая качалка; з - угловая качалка; и - качалка с разнесенным» вдоль оси вращения рычагами (верхняя опора не показана); 1- ушковой стакан; 2-труба; 3-стакан; 4-контргайка; 5 - сварной шов |
|
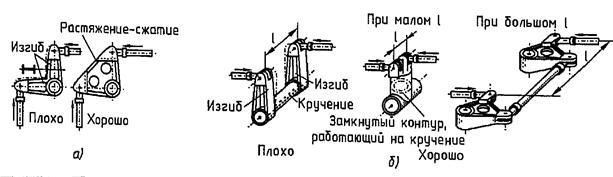
| Рис.1.6. Качалки в механической проводке: а - плоские; б - пространственные; |
при совершенствовании самолета происходит постоянное наращивание функций, выполняемых системой управления. Их реализация связана с усложнением механической системы (применение дополнительных механических звеньев, смесителей, сервоприводов и других устройств). Поэтому объединение функций проще производить на уровне электрических цепей (сигналов). В этом случае может быть получен выигрыш по массе и занимаемому объему, особенно на самолетах больших размеров;
|
| Рис.1.7. Качалки: а - ферменная в механической проводке; б - оптимальная по массе и жесткости; 1 - жесткая тяга; 2 - ферменная качалка; 3 - входная тяга; 4 - выходная тяга |
при переходе на полностью электрическое управление приводы должны иметь только электрический вход для приема управляющих сигналов. В связи с этим между рычагом управления и приводом полностью исключаются механические элементы и, соответственно, все свойственные им недостатки;
|
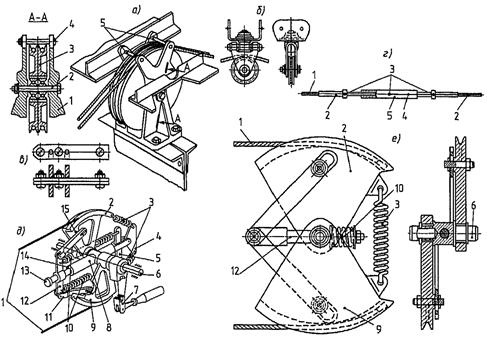
| Рис.1.8. Основные элементы механической проводки гибкого типа: а - направляющий ролик: 1 - кронштейн; 2 - ось; 3 - ролик; 4 -болт-ограничитель; б - самоориентирующаяся установка ролика; в - направляющая колодка; г - типовое соединение узлов с помощью тандера; 1 - трос; 2 - наконечник; 3 - контровочные отверстия; 4 - контровка тандера; 5 - муфта; д, е - регуляторы натяжения тросов; 1 - тросы; 2 - верхний подвижный сектор; 3 - пружины натяжения тросов; 4 - качалка выравнивания натяжений верхнего и нижнего тросов; 5 - качалка; 6 - ось вращения механизма, к которой неподвижно крепятся рычаг 7 и коромысло 8; 9 - нижний подвижный сектор; 10 - пружина; 11 - серьга с прорезью; 12 - ползушка; 13 - упор ползушки при максимальном удлинении фюзеляжа; 14 - упор ползушки при максимальном сокращении длины фюзеляжа; 15 - палец |
при исключении МСУ управляющая часть системы управления может быть построена с использованием типового электронного оборудования (вычислителей, цифровых шин данных, блоков управления и контроля, датчиков и другого оборудования), которое позволяет весьма оперативно менять структуру системы входной части. Однако применение МСУ в качестве резервной системы имеет свои привлекательные стороны, особенно вследствие высокой надежности МСУ.
Примеры основных элементов, которые нашли широкое применение на самолетах как в основных, так и в резервных МСУ, даны на рис.1.5 - рис.1.9, в табл.1.2. Применение ферменных качалок существенно уменьшает их податливость и массу (рис.1.7). Оптимальное соотношение звеньев фермы качалки подбирается из соотношения  при угле
при угле  .
.
На рис.1.10 показана МСУ вращательного типа, применяемая в основном в системах управления закрылков, предкрылков, стреловидностью крыла, "переставными" стабилизаторами.
|
| Рис.1.9. Механические суммирующие устройства: а - рычажное дифференциальное, суммирующее два входных перемещения с одним выходным звеном; б - рычажное дифференциальное, суммирующее два входных перемещения с двумя выходными звеньями; в - трехплечевая качалка; г - раздвижная тяга; д - редуктор с жестким соединением двух входных вращений с выходным; е - редуктор, суммирующий два входных движения на один общий вал |
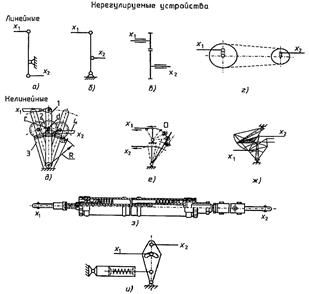
Устройства регулирования коэффициента передачи проводки
| Схема устройства регулирования передачи | Статическая характеристика |
| 
|
| 
|
| Примечание: а, б - неравноплечий рычаг; в - редуктор; г - тросовая передача со шкивами разных диаметров; д - шестеренный нелинейный механизм с кривошипом; е - кулисный механизм; ж - простейший кулисный механизм с жестким треугольником; з - пружинная тяга с предварительным натягом пружины; и - механизм с люфтом; к, л, м - устройства, регулирующие коэффициент передачи в зависимости x1; область расположения статистических характеристик заштрихована;-· - максимальные значения x1 x2. |
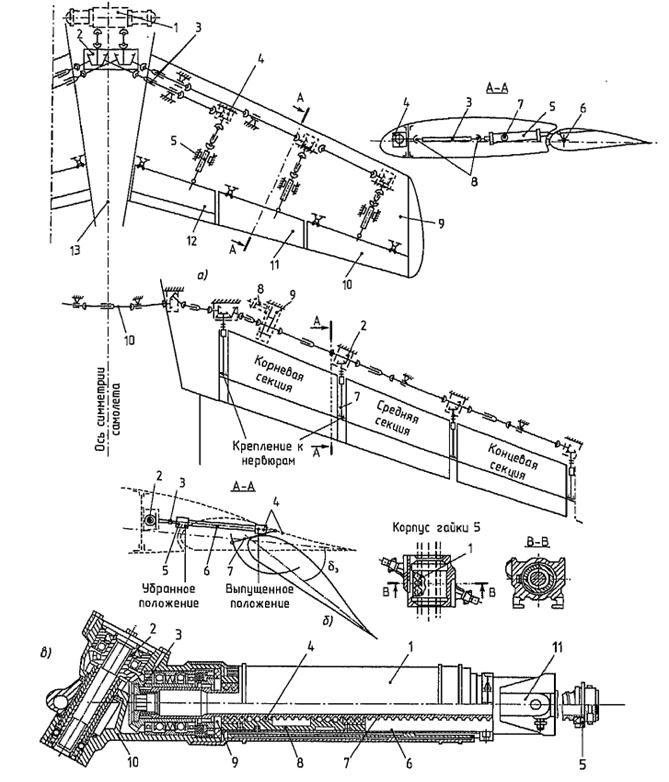
|
| Рис.1.10. Вращательная проводка системы управления: а - рулем высоты; 1 - коробка передач с гидромоторами; 2 - коробка распределительных передач; 3 - телескопическое шлицевое соединение; 4 - передача с коническими шестернями; 5 - винтовой механизм; 6 - ось вращения руля; 7 - цапфа винтового механизма; 8 - карданное соединение; 9 - стабилизатор; 10, 11, 12 - соответственно концевая, средняя и корневая секция руля высоты; 13 - ось симметрии самолета; б - управления закрылками; 1 - шарик; 2 - передача коническими шестернями; 3 - соединительная муфта; 4 - опорные элементы на каркасе крыла; 5 - корпус гайки; 6 - ходовой винт; 7 - шарнирное звено; 8 - гидромотор; 9 - коробки передач; 10 - синхронизирующий вал; а - винтовой механизм с шестеренной передачей; 1 - телескопический кожух; 2 - шестерня; 3 - зубчатое колесо; 4 - шарик; 5 - нижний упор (выпущенного положения); 6 - вильчатая труба; 7 - винт; 8 - гайка, 9 - верхний упор (убранное положение); 10 - корпус; 11 - серьга |
Разработка и внедрение систем улучшения устойчивости и управляемости повышенной эффективности (самолеты Ту-144, Ту-154, Ан - 124, Ил-96), а также СДУ с резервным механическим управлением (самолет Т-4) создали надежную базу, на основе которой разработана СДУ как основная система управления рулями самолета. В первых структурах СДУ в основном использовалась аналоговая элементная база, надежность которой подтверждена летной эксплуатацией. Применение эффективных методов резервирования, глубокого контроля состояния системы, надежного электро- и гидропитания позволили обеспечить безопасность полета самолета с СДУ при практически любых возможных отказах элементов СДУ и взаимодействующих с ней систем.
Для обеспечения требований к надежности управления и безопасности полета аналоговые СДУ (АСДУ) имели уровень резервирования не менее четырехкратного, что позволяло сохранить работоспособность СДУ (как минимум) после двух последовательных отказов. Были разработаны СДУ в шестиканальном исполнении, когда по соображениям живучести было принято целесообразным разделение системы на две трехканальные автономные подсистемы, которые размещались по разным бортам самолета. Такая система способна функционировать после полного отказа подсистемы одного борта и еще одного отказа в подсистеме другого борта или после трех последовательных отказов в двух подсистемах СДУ.
Вместе с тем, увеличение сложности управляющей части современных самолетов, главным образом из-за увеличения числа поверхностей управления и их приводов, расширения функций системы управления, а также ужесточения требований к динамике систем, точности отработки их сигналов и надежности управления, обусловили необходимость повышения эффективности управляющей части системы за счет использования достижений в области электронных систем управления.
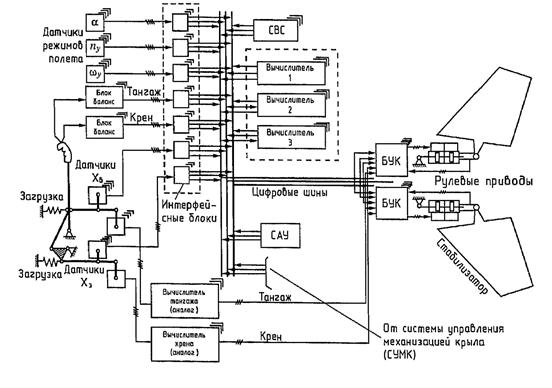
При сохранении аналоговых электрических связей затрудняется обеспечение необходимой точности отработки сигналов и интеграция управляющей части системы ввиду необходимости применения большого числа проводов для соединения каждого функционального сигнала с оборудованием, входящим в систему управления. Поэтому более рациональной структурой является структура управляющей части, использующая цифровую технологию (рис.1.11).
Применение цифровой вычислительной машины в системе управления самолета наряду с более эффективной обработкой данных и управлением вычислительным процессом в системе управления обеспечивает:
сбор и хранение больших массивов информации от датчиков различных систем самолета и командных рычагов управления;
обработку большого объема информации и представление ее в обобщенном виде на индикаторах в кабине;
формирование командного сигнала высокой точности при управлении самолетом с учетом изменения его характеристик и режимов полета, включая наличие ограничений в аэродинамических характеристиках и прочности самолета;
контроль состояния системы; осуществление перестройки структуры системы при отказах; введение приоритета для систем наиболее важных с точки зрения безопасности.
Возможности цифровой техники в значительной мере зависят от степени совершенства применяемой цифровой машины, которую определяет ее микропроцессор (МП). Возможности микропроцессора могут быть реализованы только при условии высокой надежности вычислителя. Поэтому вычислители с точки зрения безопасности полета имеют трех-четырехкратное резервирование. При этом уровне резервирования сохраняется работоспособность системы после как минимум двух последовательных отказов цифровых каналов.
Современные цифровые системы управления имеют как аппаратурное, так и программное резервирование (самолеты A-320, В-777), Это связано с необходимостью уменьшения вероятности отказа системы до уровня практически невероятного ( <
< ).
).
Устройства регулирования коэффициента передачи проводки.
Представляют интерес некоторые данные по цифровой системе управления пассажирского самолета Боинг-777, имеющего трехкратное резервирование цифровых шин данных и девятикратное резервирование микропроцессора. Управление самолетом осуществляется по трем независимым каналам - правому, центральному и левому, каждый из которых имеет трехкратно резервированный микропроцессор и свой язык программирования.
При переходе к цифровой форме сигнала может быть осуществлена передача множества сигналов функциональных систем по одной шине, состоящей из двух скрученных, экранированных проводов, но с определенной дискретной частотой и последовательностью. Причем эта частота должна быть очень высокой (50... 100 МГц), чтобы обеспечивалась скорость передачи 1...2 Мбит/с. Для волоконно-оптических связей скорость передачи сигнала может достигать 20 Мбит/с.
Цифровая шина данных является одним из важнейших элементов интеграции электронных систем самолета. С ее помощью могут быть объединены свыше сотни различных источников сигналов (терминалов), расположенных в разных местах самолета. В общем случае используемое число терминалов зависит от пропускной способности шины данных, быстродействия вычислителей, управляющих этим процессом, и пропускной способности связей оборудования с терминалом.
|
| Рис.1.11. Структура цифровой СДУ |
В настоящее время уделяется большое внимание вопросу внедрения в системы управления цифровых шин данных. Например, стандартная шина MIL-STD-1553B (введена в действие в 1978 г.) применяется примерно на 30 типах военных самолетов США от В-52 и F-4 до F-L8/A и AV-8B, а также на самолетах JAS-39 и 'Торнадо".
В гражданской авиации аналогом шины MIL-STD- 1553В в известной мере является шина ARING-429, которая также представляет экранированную скрученную пару проводов. Шина имеет быстродействие порядка 1 Мбит/с и обеспечивает передачу до 30 различных сигналов. Такая шина установлена на транспортных самолетах В-757 и В-767, А-300, А-310, А-320, На отечественных самолетах применяют шины, близкие по структуре и параметрам шинам MIL-STD-1553B и ARING-429.
|
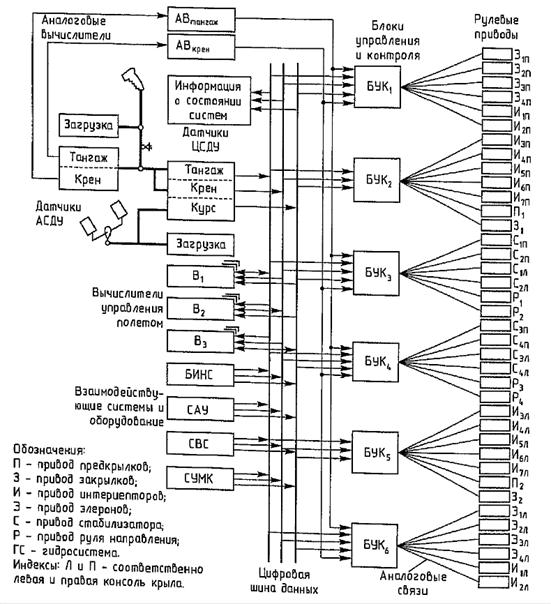
| Рис.1.12. Управляющая часть системы управления тяжелого самолета |
Опыт использования цифровой шины непосредственно в контуре управления самолетом пока ограничен небольшим числом самолетов. Поэтому в качестве основных мер обеспечения надежности системы с цифровой шиной рассматриваются меры, широко применяемые в жизненно важных электронных системах. Это прежде всего резервирование шины. Шина, выполняющая критические с точки зрения безопасности полета функции, должка иметь трех-четырехкратное резервирование, обеспечивающее сохранение работоспособности после двух последовательных отказов и эффективную защиту шины от отказов типа "общих точек" как аппаратурных, так и по линии программного обеспечения.
Внедрение цифровых шин в контур управления самолетом знаменует новый этап автоматизации управления, Датчики и приводы современных электродистанционных систем управления пока используют в основном аналоговые сигналы, которые подлежат преобразованию цифроаналоговыми и аналого-цифровыми преобразователями при обмене данными между шиной и этими устройствами. Эти операции вносят дополнительное запаздывание в передаче сигнала и снижение надежности.
В связи с тем, что в системе управления может применяться достаточно большое число приводов рулей (до 35...40), возникает проблема распределения сигналов управления от шины к рулевым приводам. Эту задачу выполняют блоки управления и контроля, которые могут использоваться в нескольких вариантах.
Один вариант структуры содержит электронные блоки, каждый из которых обслуживает группу модулей приводов самолета (В-777), в которую могут входить модули приводов различных каналов управления (тангаж, крен, курс). В другом варианте структуры каждый модуль привода имеет свой блок управления и контроля. Для сокращения числа электронных блоков модулей привода, возможно их объединение в единый электронный блок, обслуживающий все модули привода конкретного органа управления (например, элерона или интерцепторов на данном пол укрыл е). Такая схема в качестве примера управляющей части представлена на рис.1.12.
Из всех рассмотренных систем, входящих в управляющую часть системы управления, интеграции поддается большинство электромеханических и электрогидравлических систем. Их функции полностью берут на себя электронные системы.
Наиболее консервативная часть систем, которая претерпела мало изменений при эволюции систем управления - это рычаги управления с устройствами их загрузки и триммерными механизмами. На маневренных самолетах и даже на стратегических бомбардировщиках (В-1, Ту-160) в основном применяются рычаги управления и виде центральной ручки и педалей с пружинными загружателями. Это фактически та силовая механическая часть системы, которая осталась в управляющей части на современных и перспективных самолетах.
Кроме того, имеются три функции, реализация которых еще не подучила всеобщего однозначного решения.
1. Осуществление балансировки по усилиям. В одном случае балансировка может производиться таким образом, что рычаг управления будет устанавливаться в нейтральное положение (Р в 0) за счет "перекачки" сигнала с ручки на рулевой привод, В другом случае балансировка обеспечивается механизмом триммирования при положении рычага управления, отличном от нейтрали с помощью триммерного механизма.
0) за счет "перекачки" сигнала с ручки на рулевой привод, В другом случае балансировка обеспечивается механизмом триммирования при положении рычага управления, отличном от нейтрали с помощью триммерного механизма.
|
|
|
|
|
Дата добавления: 2013-12-14; Просмотров: 2562; Нарушение авторских прав?; Мы поможем в написании вашей работы!