КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 13 Приборы и системы измерения высотно-скоростных параметров
|
|
|
|
Управление траекторным движением ЛА в воздушной среде определяет необходимость измерения параметров как воздушной среды, так и характеризующих движение относительно нее ЛА. К высотно-скоростным параметрам (ВСП) движения ЛА в воздушной среде относятся;
абсолютная барометрическая высота полета ЛА над средним уровнем моря Н абс;
относительная барометрическая высота полета ЛА Нотн равная разности абсолютной барометрической высоты полета ЛА и абсолютной барометрической высоты Нз заданной точки земной поверхности (аэродрома);
истинная воздушная скорость Vист;
приборная скорость Vпр;
число М;
вертикальная скорость V у;
скоростной напор q;
местный угол атаки αм;
местный угол скольжения βм;
истинный угол атаки α;
истинный угол скольжения β;
статическое давление воздуха на высоте полета ЛА рст;
полное давление воздушного потока рп;
скорость звука на высоте полета ЛА а;
температура полностью заторможенного патока воздуха Тт;
температура наружного воздуха Тн;
предельно допустимые в эксплуатации ЛА значения угла атаки, приборной скорости, числа М и вертикальной перегрузки nу.
В практике авиационного приборостроения в основу принципа действия бортовых средств измерения ВСП положен косвенный метод измерений, при котором в качестве первичной измерительной информации используются текущие значения:
статического давления воздушной среды в специально выбранной на поверхности ЛА точке рст.м;
полного давления воздушного потока рпм;
температуры заторможенного потока воздуха Тт;
местного угла атаки αм;
местного угла скольжения βм;
статического давления на уровне поверхности Земли р3.
Определение текущих значений ВСП производится по известным стандартным функциональным зависимостям с учетом индивидуальной для каждого типа ЛА градуировки преобразователей первичной информации:
Р ст = F (Р ст.м М, α м, β м);
Р п = F (Р п.м М, α м, β м);
Р дин = Р п - Р ст;;
Н абс = F (Р ст), определяется ГОСТ 4401;
М = F (Р п/ Р ст), определяется ГОСТ 25431;
 , где R - газовая постоянная; R =29,27 м/К;
, где R - газовая постоянная; R =29,27 м/К;
k - показатель адиабаты, k = 1,4;
V ист = аМ;
 , где Р ст0 и Т 0 - стандартные значения давления и температуры воздуха на уровне моря;
, где Р ст0 и Т 0 - стандартные значения давления и температуры воздуха на уровне моря;
 ;
;
 , где N(M) - коэффициент качества;
, где N(M) - коэффициент качества;
 ;
;
 ;
;
 , где функции
, где функции  и
и  определяются экспериментально индивидуально для каждого типа самолета и места установки датчиков аэродинамических углов,
определяются экспериментально индивидуально для каждого типа самолета и места установки датчиков аэродинамических углов,
Развитие и внедрение в бортовое оборудование цифровой вычислительной техники, создание высокоточной экспериментальной базы и методик трубного и летного экспериментов явились основой для разработки методов измерения высотно-скоростных параметров на основе информации о значениях давления воздушного потока в специально выбранных точках поверхности ЛА. Данный подход позволяет существенно расширить рабочий диапазон аэрометрических систем по скорости и аэродинамическим углам.
Формирование границ области допустимых в эксплуатации значений угла атаки, приборной скорости, числа М и вертикальной перегрузки пу производится на основе функциональных зависимостей, индивидуальных для каждого типа самолета.
Типовая архитектура тракта измерения высотно-скоростных параметров (ВСП). Типовой состав бортового оборудования для информационного обеспечения экипажа и бортовых систем параметрами движения ЛА в воздушной среде включает следующие типовые информационно-измерительные средства:
приемники и датчики первичной информации;
системы выработки информации о текущих, заданных и предельно допустимых значениях высотно-скоростных параметров;
средства представления информации экипажу (визуальное, звуковое и др.);
резервные средства измерения и индикации.
Типовой состав оборудования и функциональные связи показан на рис.2.13:
ПСД - приемник статического давления в воздушном потоке;
ППД - приемник полного давления воздушного потока;
БКПВД - блок контроля исправности обогрева приемников воздушных давлений;
ПТ- приемник температуры торможения воздушного потока;
ДАУ - датчик аэродинамических углов;
ПДЗ - пульт задатчик давления у земли;
ДЛУ - датчик линейных ускорений;
ВБМ - высотомер барометр и чески и механический;
УСМ - указатель скорости и числа М;
ВР - вариометр (указатель скорости спуска/подъема);
СВС - система воздушных сигналов;
СПКР - система предупреждения критических режимов;
СОН - средства визуального представления информации экипажу;
БПК - биполярный последовательный двоичный код, ГОСТ 18977;
РК - разовые команды.
|
| Рис.2.13. Типовой состав бортового оборудования для выработки информации о текущих и предельнодопустимых значениях ВСП |
|
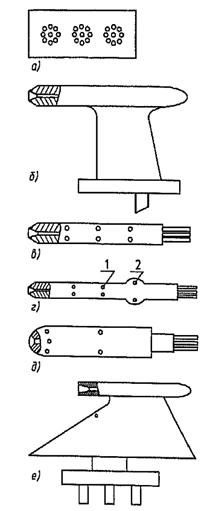
Рис.2.14. Приемники воздушных давлений:
а – статического давления р ст на плитах; б – полного давления р п; в – воздушных давлений р ст и р п; г - воздушных давлений р ст и р п с аэродинамической компенсацией; д – многофункциональный приемник р ст,  , , , , , , , , ; е – флюгерный приемник воздушных давлений р п, ,типа "Рафаль"; 1,2 – группа приемных отверстий статического давления ; е – флюгерный приемник воздушных давлений р п, ,типа "Рафаль"; 1,2 – группа приемных отверстий статического давления
|
Приемники первичной информации. Приемники воздушных давлений. Приемники воздушных давлений предназначены для восприятия текущих значений параметров воздушного потока, в частности статического и полного давлений, и передачи информационных сигналов бортовым датчикам давлений. Приемники воздушных давлений по выполняемым ими функциям принято классифицировать следующим образом:
статического давления ПСД;
полного давления ППД;
воздушных давлений ПВД;
многофункциональные приемники воздушных давлений для восприятия статического, полного давлений и давлений, зависящих от угла атаки и угла скольжения.
Конструктивное исполнение приемников во многом зависит от следующих факторов:
количества выполняемых функций;
эксплуатационных диапазонов изменения углов атаки и скольжения;
места расположения приемника на поверхности ЛА.
Примеры конструктивного исполнения приемников воздушных давлений представлены на рис.2.14.
Основными характеристиками приемников являются:
число независимых измерительных камер для восприятия давлений воздушного потока;
аэродинамические погрешности восприятия статического и полного давлений; как правило, зависят от геометрии приемника, места его установки на ЛА, параметров полета (числа М, углов атаки и скольжения, статического давления);
динамические характеристики приемника;
устойчивость приемника к воздействию атмосферных условий, вызывающих обледенение.
Величины аэродинамических погрешностей значительно превышают инструментальные погрешности датчиков давления и во многом определяют безопасность полета ЛА. Соответствие характеристик приемников требованиям действующих нормативно-технических документов подтверждается натурными испытаниями в аэродинамических трубах и летными испытаниями в составе ЛА.
Характер зависимости аэродинамической погрешности восприятия статического давления от высоты и числа М для разных приемников, представленных на рис.2.14, показан на рис.2.15.
| 
|
| Рис.2.15 Зависимость аэродинамической погрешности δрст приемников по рис.2.14, г от числа М и высотыдля групп отверстий 1,2δр ст=(р ст изм- р ст)/ р ст, где р ст изм – статическое давление воздуха, воспринятое ПВД) | Рис.2.16. Приемник температуры торможения воздушного потока: 1 - корпус; 2 - дренажное отверстие; 3 - термочувствительный элемент; 4 - камера 5 -электрический соединитель |
Приемники температуры. Измерение температуры невозмущенного движением ЛА потока воздуха производится косвенным методом на основе измерений температуры заторможенного потока воздуха и числа М. Практически на всех современных ЛА, осуществляющих полеты в диапазоне высот до 30000 м и чисел M 3, для измерения температуры торможения Тт применяются термометры сопротивления с чувствительным элементом из платиноиридиевого сплава. Приемник температуры (рис.2.16) содержит следующие основные элементы: корпус 1, выполненный в виде тела вращения, камеру торможения воздушного потока 4, термометр сопротивления 3.
3, для измерения температуры торможения Тт применяются термометры сопротивления с чувствительным элементом из платиноиридиевого сплава. Приемник температуры (рис.2.16) содержит следующие основные элементы: корпус 1, выполненный в виде тела вращения, камеру торможения воздушного потока 4, термометр сопротивления 3.
К основным метрологическим характеристикам приемника следует отнести:
диапазон измерения температуры;
инструментальную погрешность;
динамическую погрешность;
устойчивость к воздействию атмосферных условий, вызывающих обледенение поверхности ЛА.
Современные приемники температуры торможения воздушного потока обеспечивают измерения с инструментальной погрешностью не более 0,5 °С в широком диапазоне изменения углов атаки и скольжения. Динамические характеристики приемника достаточно хорошо описываются дифференциальным уравнением первого порядка с постоянной времени, зависящей от высоты полета (увеличивается с увеличением высоты).
Датчики аэродинамических углов. Датчики аэродинамических углов предназначены для выработки информации о текущих знамениях углов атаки и скольжения. По принципу действия их можно разделить на датчики:
флюгерного типа;
пневмометрический.
Датчики флюгерного типа реализуют прямое измерение местного (в месте его установки) угла атаки или скольжения. Угол отклонения флюгера определяется направлением линий тока воздушного потока.
Для измерения угла атаки датчик устанавливается таким образом, чтобы ось вращений флюгера была параллельна оси Оz связанной системы координат, а для измерения угла скольжения параллельна оси Оу. Для определения истинного угла атаки проводят трубный и летный эксперимент, по результатам которых определяют эмпирическую зависимость между истинным и местным аэродинамическими углами. Наиболее часто применяется линейная аппроксимация вида:
 ,
,
где  - угол начальной установки флюгера; К(М) - коэффициент; определяется по результатам эксперимента.
- угол начальной установки флюгера; К(М) - коэффициент; определяется по результатам эксперимента.
Пневмометрические датчики аэродинамических углов можно разделить на датчики со следящим приводом и с неподвижным пневмометрическим зондом. Датчики первого типа имеют в своем составе пневмометрический зонд (например, цилиндр, сферу), вынесенный в набегающий поток и имеющий одну (две) степени свободы. На поверхности зонда размещены отверстия для восприятия давления воздушного потока. При изменении угла атаки (скольжения) изменяется разность давлений в приемных отверстиях пневмозонда. Под воздействием этой разности сервопривод производит поворот пневмозонда до тех пор, пока не восстановится ее первоначальное значение. Угол поворота зонда будет пропорционален изменению местного угла атаки. Датчики с неподвижным зондом практически совпадают с многофункциональными ПВД, описанными выше.
Основными метрологическими характеристиками датчиков аэродинамических углов являются:
диапазон измерения;
статическая погрешность;
динамические характеристики
В качестве верхней оценки практически реализуемого диапазона измерения аэродинамических углов датчиками можно принять диапазон ± 90°. Инструментальная погрешность флюгерных датчиков определяется стабильностью аэродинамических характеристик флюгера, сил трения в опорах и характеристик преобразователя угла поворота, а электрический сигнал, в пневмометрических - стабильностью аэродинамических характеристик пневмозонда и датчиков давления.
Динамический характеристики датчиков аэродинамических углов можно охарактеризовать полосой пропускания полезного сигнала в несколько десятков герц.
|
|
|
|
Дата добавления: 2013-12-14; Просмотров: 4238; Нарушение авторских прав?; Мы поможем в написании вашей работы!