КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 16 Система отображения информации
|
|
|
|
Система отображения информации представляет собой совокупность средств индикации, сигнализации и управления, размещенных в пространстве рабочего места летчика в соответствии с требованиями нормативных документов, а также некоторых устройств, обеспечивающих преобразование информации в требуемый вид. Различают два вида СОИ - открытого и закрытого типа.
Система открытого типа формируется по принципу датчик-индикатор (сигнализатор), орган управления - исполнительный механизм (устройство) или датчик-преобразователь - индикатор (сигнализатор), орган управления - преобразователь - исполнительное устройство.
Система закрытого типа формируется на основе устройств сбора данных от бортовых систем, переработки информации в требуемый вид и выдачи на отображающие устройства. В устройство сбора данных поступает командная информация от летчика, перерабатывается и поступает в бортовые системы. В функции устройств сбора и обработки информации, как правило, входит и решение задачи приоритета между системами-абонентами.
Индикаторы директорные. К этой группе относятся два типа приборов:
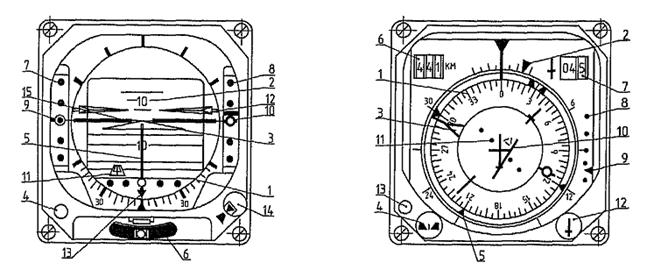
1) отображающих параметры пространственного положения самолета в вертикальной плоскости - индикаторы командно-пилотажные (КПП) (рис. 2.23);
2) отображающих параметры пространственного положения самолета в горизонтальной плоскости - индикаторы навигационно-плановые (ИНП) или навигационно-плановые приборы (НПП) (рис. 2.24).
Директорные приборы имеют различные модификации и устанавливаются в строго определенное место на приборной доске - в центре (по оси рабочего места пилота). Сверху, под самым козырьком, помещают прибор типа КПП, под ним, в непосредственной близости, устанавливают прибор типа НПП. Такое размещение закреплено нормативными документами.
Применение директорных индикаторов вызвано острой необходимостью сосредоточить в самом удобном месте приборной доски показания наиболее важных параметров пилотирования и навигации и, тем самым, уменьшить значительное количество специализированных индикаторов, а главное - снизить загрузку летчика во время пилотирования в сложных метеоусловиях, а также на этапах захода на посадку и при посадке. Задача пилотирования по директорным индикаторам сводится к тому, чтобы с помощью органов управления (штурвала, педалей) сблизить текущие параметры с заданными и удерживать расхождения вблизи нулевых значений. С появлением директорных приборов и аппаратуры, их информационного обеспечения качество пилотирования ЛА изменилось принципиально, открылись широкие перспективы автоматизации управления полетом.
| |
| Рис. 2.23. Командно-пилотажный прибор: 1 - шкала крена; 2 - шкала тангажа; 3 - силуэт самолета (лидер); 4 - кнопка тест-контроля; 5 - индекс отклонения от равносигнальной зоны курсовых маяков в режиме захода на посадку; 6 - указатель скольжения; 7 - шкала отклонения скорости на глиссаде; 8 - шкала отклонений высоты на глиссаде; 9 - индекс отклонений от заданной скорости на глиссаде; 10 - индекс отклонения от заданной высоты на глиссаде; 11 - индекс отклонения от осевой линии ВПП; 12 - индекс шкалы тангажа; 13 - индекс шкалы крена; 14- ручка установки шкалы тангажа; 15 - линия горизонта | Рис. 2.24. Навигационно-плановый индикатор: 1 - шкала курса; 2 - индекс отклонения от заданного курса; 3 - стрелка курсового угла радиостанции; 4 - кремальера ручного ввода заданного курса; 5- стрелка-указатель угла сноса; 6- счетчик дальности; 7 - счетчик заданного путевого угла; 8 - шкала равносигнальных зон глиссадного радиомаяка; 9 - индекс шкалы равносигнальных зон глиссадного радиомаяка; 10 - индекс шкалы равносигнальных зон курсового радиомаяка; 11 - шкала равносигнальных зон курсового радиомаяка; 12 - кремальера ручного ввода заданного путевого угла; 13 - кнопка тест-контроля |
Индикация информации на плоскопараллельном стекле. Индикаторы на лобовом стекле и индикаторы на стекле - две различные модификации, имеющие существенные конструктивные различия. Первые индицируют информацию на лобовом стекле фонаря кабины и закреплены на элементах жесткости фонаря, вторые индицируют информацию на плоскопараллельном полупрозрачном стекле, расположенном между глазами летчика и лобовым остеклением фонаря, и могут быть установлены на приборной доске или на потолке кабины.
Возможности этого средства отображения информации позволяют летчику, не отрывая глаз от рассматриваемой воздушной или наземной обстановки при выполнении операции маневрирования, захода на посадку или посадки в условиях острого дефицита времени, видеть значения параметров скорости, высоты, курса, индексы директорных планок и метки, метки глиссады, прицельные параметры и метки.
Необходимая информация поступает от различных устройств и блоков систем в специализированный электронный блок, преобразуется в кодовый эквивалент и выдается на электронно-лучевую трубку - основной конструктивный элемент индикатора, трансформирующий поступающую информацию в соответствующий этапу полета вид индикации. Оптическое коллиматорное устройство фокусирует параметры на бесконечность. Имеющийся опыт создания индикатора на лобовом стекле реализован на принципе электромеханического преобразователя.
Индикаторы высотно-скоростных параметров (ИВСП) входят в группу основных пилотажных индикаторов (приборов) и конструктивно выполнены в двух модификациях: манометрические, электрические.
Манометрические приборы используют информацию о динамическом и статическом давлениях и об их соотношениях, поступающую непосредственно от соответствующих датчиков давления. Электрические приборы представляют собой электрические повторители тех же параметров, но получают информацию от электрической централи скорости и высоты полета.
ИВСП отображают информацию о воздушной скорости v, числе М, вертикальной скорости vy, барометрической высоте Н. Указатели воздушной скорости и числа М конструктивно комплексируются в общем корпусе. Некоторые модификации ИВСП имеют встроенные сигнализаторы красного цвета, оповещающие о достижении предельно допустимых значений параметров.
Резервные индикаторы. Часть пилотажных приборов относится к числу дополнительных: электрический указатель радиовысотомера малых или больших высот, специализированные автономные указатели курса, азимута маяков, указатели углов атаки и перегрузки, автономный резервный авиагоризонт, автономный магнитный компас. Задача группы резервных автономных индикаторов - обеспечение необходимой информацией летчика в минимальном объеме в случае отказа основных индикаторов.
БОРТОВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА
Бортовая вычислительная система является центральной системой комплекса бортового оборудования, обеспечивающей реализацию всей совокупности целевых задач ЛА различного назначения. В состав БВС входит и вычислительная система ПНК. Подходы к построению БВС, в том числе и вычислительной системы ПНК, изменялись по мере расширения и усложнения решаемых задач, а также по мере совершенствования вычислительных средств и аппаратуры комплекса.
В первых ПНК, построенных с применением бортовых ЭВМ, обмен информацией между датчиками и машиной производился в аналоговой форме. При внедрении цифровых датчиков для связи с аппаратурой КБО и организации межмашинного обмена стали использоваться каналы с последовательной передачей кода, образующие радиальную систему информационного обмена.
Мультиплексные каналы обеспечивают построение федеративно-централизованных БВС с магистральной организацией структуры. При этом ПНК, как и любая подсистема КБО, может быть построена или на основе локального мультиплексного канала, или с использованием радиальных каналов. Общими особенностями существующих БВС являются: жесткое закрепление ресурсов за информационными каналами КБО путем аппаратной организации соответствующих подсистем и недостаточный уровень унификации, что затрудняет как проведение модернизаций КБО, так и разработку новых комплексов.
Требуемый вычислительный ресурс, необходимый для решения, например, задач ПНК военного самолета ближайшей перспективы (без задач КЭНС) составляет по быстродействию порядка 3...5 млн опер./с, по памяти порядка 1,5...2 Мбайт. Экспертная оценка требований задач, обеспечивающих маловысотный полет и работу КЭНС, показывает, что для их решения необходимы быстродействие порядка 20...25 млн опер./с и память порядка 50...60 Мбайт.
Нормальное функционирование КБО самолета нового поколения обеспечивает лишь функционально-ориентированная БВС, ресурсы которой могут динамически перераспределяться между информационными каналами комплекса в зависимости от решаемых задач и концентрироваться для выполнения наиболее важных функций. Функционально-ориентированную БВС целесообразно строить на основе концепции открытой архитектуры БЦВМ и систем, глубокой унификации, аппаратной интеграции и высокой технологичности.
Концепция открытой архитектуры, базируясь на использовании ограниченных наборов унифицированных модулей и стандартных интерфейсов, позволяет создавать масштабируемые средства вычислительной техники, а на их основе - БВС в соответствии с требованиями конкретного применения.
Глубокая унификация предполагает стандартизацию аппаратных модулей, интерфейсов, конструктивного исполнения модулей и БЦВМ, программного обеспечения.
Аппаратная интеграция обеспечивает построение интегрированной вычислительной среды, ресурсы которой могут динамически перераспределяться произвольным образом.
Высокая технологичность подразумевает использование современной технологии разработки БВС и обеспечивает снижение технического риска при создании КБО.
Эти концепции обеспечивают единый подход к созданию БВС практически с любой организацией структуры и могут быть использованы и при модернизации КБО, и при создании вычислительной системы перспективного комплекса.
Для построения КБО ближайшей перспективы (примерно до 2010 г.) скорее всего, будут использоваться магистрально-модульные сетевые БВС. Структуру БВС образуют интегрированные бортовые ЭВМ, которые выполняют обработку, как сигналов, так и данных "ядра" вычислительной системы, решение задач в котором максимально не зависит от конкретного состава бортового оборудования, и ряда подсистем, не входящих в состав ядра, таких как подсистема управления общесамолетным оборудованием, подсистема управления полетом и др. Для организации структуры ядра могут быть использованы сетевые магистральные интерфейсы типа AS4074 (AS4075). Для взаимодействия ядра с подсистемами БВС могут использоваться стандартные интерфейсы (ГОСТ Р 50832).
Для решения навигационных задач выделяется необходимый ресурс ядра без аппаратной организации подсистемы. Для решения пилотажных задач образуется подсистема, взаимодействующая с ядром по многократно резервированным каналам.
В составе КБО более отдаленной перспективы (после 2010 г.) может использоваться интегрированная вычислительная среда - сетевая модульная БВС с возможностью реконфигурации структуры и высоким вычислительным потенциалом, который может достигать порядка 1012 опер./с и выше. Подобные БВС могут быть построены на основе единого унифицированного интерфейса типа SCSI, который может быть использован для организации как отдельных БЦВМ, так и распределенных сетей и взаимодействия с аппаратурой КБО. Для выполнения каждой функции КБО внутри БВС будет формироваться виртуальная вычислительная система.
Современная, а тем более перспективная БВС, ядро которой представляет собой вычислительную среду, является сложной технической системой, разработка которой опирается на несколько этапов. Определяющим этапом является этап системно-структурного проектирования, заключающийся в выборе варианта БВС, соответствующего реализуемым алгоритмам. На этом этапе проводится оценка требуемого вычислительного потенциала и выбор необходимой архитектуры БЦВМ, оценивается степень взаимодействия алгоритмов между собой и с аппаратурой комплекса.
|
|
|
|
Дата добавления: 2013-12-14; Просмотров: 1474; Нарушение авторских прав?; Мы поможем в написании вашей работы!