КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Исследование кулачковых механизмов методом замены высшей КП низшими парами
|
|
|
|
Кинематическое исследование кулачковых механизмов
Кулачковым называется механизм, в составе которого кроме низших кинематических пар входят и высшие кинематические пары.
Синтез кулачковых механизмов
Кинематический анализ кулачковых механизмов.
ЛЕКЦИЯ 11
Тема: АНАЛИЗ И СИНТЕЗ КУЛАЧКОВЫХ МЕХАНИЗМОВ
Кулачковые механизмы нашли широкое применение в технике (газораспределительные механизмы, командо-аппараты и т.д.) благодаря своей простоте (всего 2-3 звена) и возможностью выполнить практически любой закон движения.
Рассмотрим несколько методов исследования кулачковых механизмов.
Вначале рассмотрим специальный кулачковый механизм, в котором звенья, связанные с элементами высшей КП представляют собой правильные круги (основной случай). Степень подвижности этого механизма
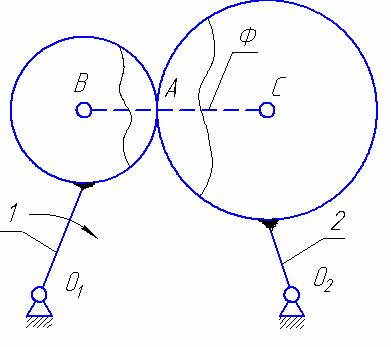 W = 3n - 2P5 - P4 = 3 · 2 - 2 · 2 - 1 = 1
W = 3n - 2P5 - P4 = 3 · 2 - 2 · 2 - 1 = 1
Если двигать первое звено, второе также будет двигаться, но расстояние между центрами кругов В и С в любом случае будет постоянно. Следовательно, если образовать в точках В и С вращательные кинематические пары и соединить их звеном, то оно мешать движению не будет. Это условное звено обычно называют фиктивным звеном. Если выбросить части звеньев в окрестности КП А (на рисунке ограничено плавными тонкими линиями), то, с учетом фиктивного звена, движение первого и второго звена не изменится.
Что мы сделали? Мы образовали вращательные КП в центрах окружностей. Один элемент каждой пары соединили с фиктивным звеном, а второй элемент этих вращательных пар соединили со звеном, в центре кривизны которого образовали КП. Полученный механизм называется заменяющим. 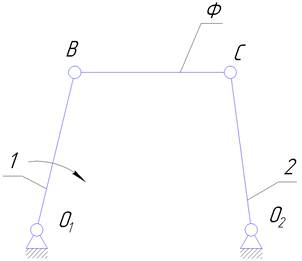
W = 3n - 2P5 - P4 = 3 · 3 - 2 · 4 = 1
Его степень подвижности не изменилась и в кинематическом смысле он эквивалентен действительному механизму.
Рассмотрим механизм с произвольной высшей КП (общий случай).
Любую кривую в какой-то точке можно заменить другой кривой с разной степенью точности. Если касательной в точке, то ошибка будет первого порядка. Если кругом кривизны, то ошибка будет третьего и более высоких порядков малости. Следовательно, кривая окружности в точке касания эквивалентна самой кривой до производных второго порядка включительно. И этой ошибкой можно пренебречь.
Таким образом, заменяющий механизм будет эквивалентен в кинематическом смысле механизму с высшими парами до производных второго порядка включительно.
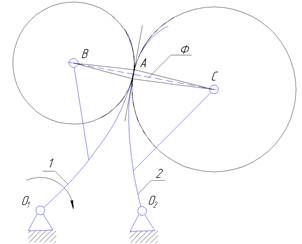
Как построить эти круги? Для этого необходимо найти центры кривизны звеньев в точке контакта любым методом (в данном случае определены методом хорд), которые и будут являться центрами кругов. Далее все делается, как и в основном случае.
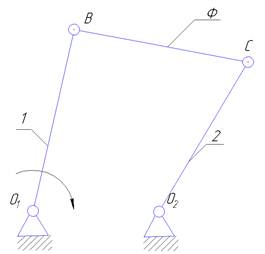 Полученный заменяющий механизм будет эквивалентен только для данного положения действительного механизма, так как в общем случае длина фиктивного звена, как и первого и второго звена будут изменяться. Теперь можно проводить кинематическое исследование шарнирно-рычажного механизма известными методами.
Полученный заменяющий механизм будет эквивалентен только для данного положения действительного механизма, так как в общем случае длина фиктивного звена, как и первого и второго звена будут изменяться. Теперь можно проводить кинематическое исследование шарнирно-рычажного механизма известными методами.
Частные случаи замены высшей пары на низшие рассмотрены в литературе [1, 2, …].
1.2. Метод кинематических диаграмм.
Рассмотрим конкретный кулачковый механизм.
Ведущее звено кулачкового механизма, имеющее криволинейный контур называется кулачком (1). Сопряженное с ним звено называется толкателем (2). Толкатели могут двигаться поступательно или качаться относительно неподвижной точки.
|
|
|
|
Дата добавления: 2013-12-13; Просмотров: 869; Нарушение авторских прав?; Мы поможем в написании вашей работы!