КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Функциональные модули автоматического регулирования FM 355
|
|
|
|
Модуль позиционирования FM 357-2
Модуль позиционирования FM 354
Примечание.
Шаговые двигатели – синхронные электродвигатели с несколькими обмотками. Последовательная активация обмоток вызывает дискретные угловые перемещения ротора. Типовые значения: 200 шагов на оборот, 400 шагов на оборот. Альтернатива сервоприводам (в 1,5 …2 раза дешевле) там, где не требуется высокая динамика и точность.
FM 354 предназначен для решения задач позиционирования и позволяет управлять электроприводами с серводвигателями. Он может быть использован для комплексного решения задач с жесткими требованиями по точности и скорости позиционирования привода.
Управляющие воздействия формируются в виде аналоговых сигналов, подаваемых на силовую секцию. В качестве силовой секции может использоваться преобразователь частоты SIMODRIVE 611 А. Текущие координаты контролируются с помощью инкрементального датчика положения или синхронно-последовательного (SSI) датчика абсолютного перемещения.
Модуль может работать в системах локального ввода-вывода программируемых контроллеров S7-300, а также в станциях систем распределенного ввода-вывода ЕТ 200М.
Примечание.
Сервопривод – следящий привод, использующий ООС. Разгоняется быстрее шагового и более точен в позиционировании.
• Одновременное управление перемещением и позиционированием по четырем осям.
• Широкий спектр решаемых задач: от независимого управления каждой осью до решения задач интерполяции для обеспечения согласованного управления по всем осям для управления движением по сложным траекториям.
• Управление приводами с шаговыми или серводвигателями.
• Поддержка распределенных конфигураций на основе сети PROFIBUS DP с поддержкой тактовой синхронизации для подключения удаленных приводов
FM 355 бывают двух модификаций:
- FM 355 C (регулятор непрерывного управления);
- FM 355 S (регулятор пошагового управления).
FM 355 С и FM 355 S имеют схожую базовую структуру. В составе этой структуры можно выделить следующие функциональные блоки:
Входы модуля FM 355:
- 4 аналоговых входа с соответствующими схемами сопряжения;
- 1 опорный вход для терморезистора термокомпенсации;
- 8 дискретных входов:
Регулятор:
- 4 независимых друг от друга канала управления, каждый из которых содержит блоки формирования системной ошибки, алгоритма управления и выхода регулятора.
Выходы модуля FM 355:
- 4 аналоговых выхода (только для FM 355 С);
- 8 дискретных выходов (только для FM 355 S).
На рис. 15.4 показана блок-схема модуля FM 355 и возможные соединения между его отдельными функциональными блоками.
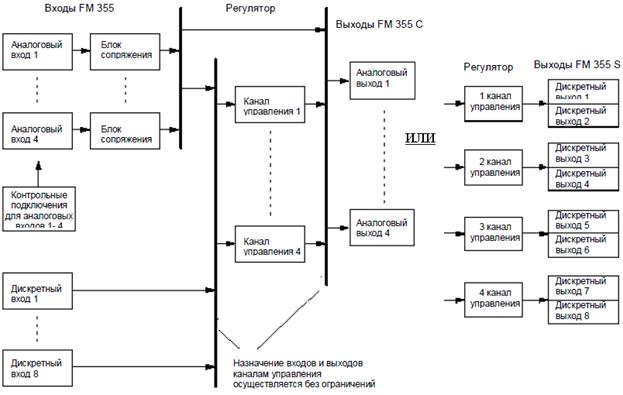
Рисунок 15.4 - Блок-схема модуля FM 355
Функциональные блоки FM 355 S не имеют фиксированных назначений по связи друг с другом. Их возможно соединить в соответствии с требуемой конфигурацией.
Каждый аналоговый вход имеет собственный аналоговый блок сопряжения, включающий в себя фильтр, устройство линеаризации и устройство масштабирования.
Каждому каналу управления можно назначить до 4 аналоговых входов и до 5 дискретных входов. Каждый канал может быть подключен к аналоговому блоку сопряжения, к дискретным входам, а также к выходу другого канала управления.
Дискретные выходы попарно жестко назначены четырем каналам управления.
Регуляторы непрерывного управления и регуляторы пошагового управления имеют одинаковую структуру аналоговых и дискретных входов.
Дискретные входы могут использоваться для переключения модуля FM 355 в различные рабочие режимы.
Аналоговые входы модуля могут быть приспособлены к различным датчикам с помощью настройки (конфигурирования) параметров. При этом возможны следующие установки:
Аналоговый вход не работает (например, не задействован)
Датчик тока в диапазоне 0 … 20 мА
Датчик тока в диапазоне 4 … 20 мА
Датчик напряжения в диапазоне 0 … 10 В
Термометры сопротивления Pt 100,
Термоэлементы типов B, J, K, R и S
Если в качестве датчика к аналоговому входу подключается термопара, можно также к опорному входу модуля FM 355 подключить терморезистор термокомпенсации Pt 100 для настройки характеристики термопары.
Блок сопряжения – блок, в котором выполняется адаптация аналоговых значений входных сигналов, имеет набор различных настраиваемых параметров:
- разрешение;
- фильтр 1-го порядка;
- квадратный корень – для линеаризации сигналов от датчика, которые имеют квадратичную связь с измеряемой переменной процесса;
- нормализация – для преобразования входных сигналов в требуемые технические единицы;
- интерполяция – для линеаризации характеристики датчика.
Регуляторы каждого канала FM 355 состоят из следующих блоков:
- блок формирования сигнала ошибки (рассогласования);
- блок алгоритма управления;
- блок выходов (для замены и адаптации управляющей переменной).
Алгоритмы регулирования:
- для управления термическим процессом – самонастраивающийся "fuzzy"-регулятор;
- ПИД-регулятор.
Типы сигнала на аналоговых выходах:
- токовый выход 0 … 20 мА;
- токовый выход 4 … 20 мА;
- выход напряжения 0 … 10 В;
- выход напряжения -10 … +10 В.
Типы регуляторов:
Для каждого канала управления FM 355 C или FM 355 S можно устанавливать различный тип управления (тип регулятора):
- стабилизация параметра на заданном уровне или каскадное управление (пример рис. 15.5);
- трехпозиционное регулирование;
- пропорциональное/смешанное управление.

Рисунок 15.5 - Каскадная система управления с двумя петлями обратной связи
Программное обеспечение.
Конфигурирование, параметрирование и мониторинг модуля FM 355 осуществляется из программатора или ПК с установленным STEP 7.
Для изменения параметров управления для FM 355 может осуществляться из пользовательской программы или с помощью команды из программатора. При этом используется функциональный блок FB PID_FM.
При параметрировании также определяется реакция на режим процессора STOP. При этом для модуля возможно продолжение работы по заданному безопасному значению уставки, или по безопасному значению уставки.
|
|
|
|
Дата добавления: 2013-12-13; Просмотров: 713; Нарушение авторских прав?; Мы поможем в написании вашей работы!