КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принцип роботи когернтно-імпульсного пристрою
|
|
|
|
Порівняння фаз і фактично розділення сигналів і перешкодових коливань, що заважають, проводиться в когерентно-імпульсному пристрої принцип роботи якого полягає в наступному.
Передавальні пристрої РЛС РТВ працюють в імпульсному режимі, і, для того, щоб забезпечити можливість порівняння фаз сигналів, що приймаються, з фазою зондуючого сигналу, необхідно використовувати допоміжний, безперервно працюючий малопотужний генератор, параметри коливань якого - частота і початкова фаза - повинні співпадати з параметрами коливань зондуючого сигналу. Такі коливання є когерентними, а сам допоміжний генератор називається когерентним гетеродином. Порівняння фаз прийнятих коливань і коливань когерентного гетеродина проводиться як правило на проміжній частоті. Тому на когернтно-імпульсний пристрій луна-сигнали подаються з виходу ППЧ приймача, а когерентний гетеродин виробляє напругу на проміжній частоті.
Оскільки дальність до місцевого предмету не змінюється, то і різниця фаз випромінюючого і відображеного від місцевого предмету сигналів від періоду до періоду зберігається постійній (мал. 3). Час запізнювання сигналу від місцевого предмету t1 в першому періоді повторення рівно часу запізнювання t1 в другому періоді; в обох періодах початкова фаза сигналу відстає від фази коливань когерентного гетеродина на однакову величину.
Дальність до цілі, яка наближається або віддаляється, постійно змінюється, тому від періоду до періоду повторення змінюється і різниця між початковою фазою відображеного сигналу і фазою коливань когерентного гетеродина через зміну часу запізнювання відображеного сигналу (t3 не рівно t2).
При цьому, чим більше радіальна складова швидкості цілі VR, тим швидше змінюється різниця фаз, тим більше і частота Доплера.
|
|
|
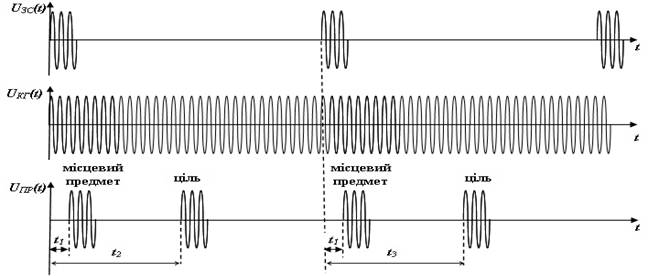 |
Рис.3. Фазові співвідношення зондуючих імпульсів, когерентного гетеродина
і імпульсів, відображених від місцевих предметів і цілі
Пристрій виміряючий різницу фаз вхідних коливань і перетворюючий їх в інший вид відмінності параметрів сигналів називають фазовим детектором.
З виходу фазового детектора сигнали поступають на режекторний фільтр, що забезпечує придушення сигналів пасивних перешкод. Режекторний фільтр може бути реалізований на проміжній або відеочастоті. Це і визначає той вид параметрів по яких відрізняються луна-сигнали ціліі пасивних перешкод на виході фазового детектора.
Якщо режекторний фільтр реалізований на проміжній частоті, то когерентний гетеродин настроюється на частоту, відмінну від проміжної частоти. Тому сигнал (перешкода) на виході ФД є радіоімпульсом, частота якого рівна різниці частот вхідного сигналу і опорної напруги когерентного гетеродина. Відмінність сигналів, відображених від нерухомих об’єктів і рухомих цілей полягає в тому, що в першому випадку всі імпульси пачки мають одну і ту ж початкову фазу, а в другому випадку - початкова фаза імпульсів змінюється від періоду до періоду повторення.
При реалізації режекторного фільтру на відеочастоті когерентний гетеродин працює на проміжній частоті і фазовий детектор перетворить фазові відмінності сигналів в амплітудні. Так у фазовому детекорі при складанні коливань виникає биття, яке після детектування перетвориться у відеоімпульси, амплітуда і полярність яких залежать від різниці фаз порівнюваних коливань. Наприклад, при співпаденні фаз утворюється максимальний по амплітуді імпульс позитивної полярності, а при різниці фаз, рівній 1800, - максимальний негативний.
Оскільки різниці фаз між когерентною напругою і сигналами, відображеними від нерухомих місцевих предметів, від періоду до періоду повторення мають одну і ту ж величину, залежну від дальності до кожного з цих предметів, відеоімпульси від них (позитивні або негативні) можуть мати різні (від різних предметів), але постійні від періоду до періоду амплітуди (мал. 4).
|
|
|
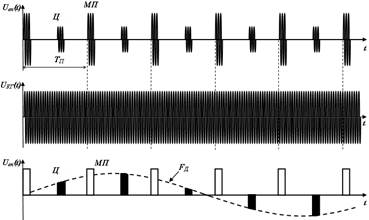
Рис. 4. Відеоімпульси на виході фазового детектора
Відмінність несучої частоти відображеного сигналу від частоти когерентної напруги (періодична зміна різниці фаз) відображається на характері биття, що виникає у фазовому детекторі.
В результаті після детектування відеоімпульси цілі на виході фазового детектора виявляться промодульованими по амплітуді коливаннями доплеровскої частоти.
Проте така відмінність існує не завжди. Якщо, наприклад, радіальна швидкість цілі така, що час приходу відображеного від цілі луна-сигналу t кожний період повторення ТП змінюється рівно на ціле число періодів коливань когерентного гетеродина nТКГ, (t = t + nТКГ) то різниця фаз між прийнятим сигналом і коливаннями когерентного гетеродина зберігається постійній при кожному прийомі сигналу. Це еквівалентно нульовій частоті Доплера. Відрізнити відмітку цілі від відміток місцевих предметів в цьому випадку стає неможливим
Радіальні швидкості при яких відбувається таке явище, називаються «сліпими». Наявність «сліпих» і близьких до них швидкостей призводить до того, що після проходження режекторного пристрою такі відмітки будуть значно ослаблені або взагалі пригнічені. Вірогідність виявлення подібної цілі зменшується, скорочується максимальна дальність їх виявлення.
Когерентно-імпульсний метод селекції дозволяє виділити сигнал рухомої цілі не тільки серед сигналів від нерухомих місцевих предметів, але і на фоні сигналів пасивних перешкод, створюваних супротивником. Металізовані відбивачі, що скидаються з літаків для створення перешкод, поволі переміщаються під дією вітру, тому несуча частота відображених від них сигналів відрізняється від несучої частоти зондуючих сигналів на частоту Доплера пропорційну радіальній швидкості руху відбивачів. Внаслідок цього на виході фазового детектора сигнали перешкоди змінюватимуться по амплітуді подібно сигналам цілі.
|
|
|
Для того, щоб усунути це, необхідно, щоб частота коливань когерентного гетеродина не відрізнялася від несучої частоти сигналів перешкод. Досягти цього можна шляхом зміни частоти коливань когерентного гетеродина на доплеровську частоту перешкоди. В РЛС цю задачу виконує схема компенсації дії вітру (СКВ).
При зміні частоти когерентного гетеродина враховується, що різні ділянки протяжних в просторі хмар перешкод рухаються щодо РЛС з різними радіальними швидкостями. Відповідно відрізняються і доплеровські частоти сигналів, відображених від цих ділянок.
Таким чином, зміна частоти когерентного гетеродина на величину FДпом повинна бути пов'язаною з напрямом антени на ту або іншу ділянку перешкоди і безперервно коректуватися при обертанні антени.
Одночасна селекція рухомої цілі на фоні нерухомих місцевих предметів і малорухливих відбивачів неможлива. Введення в частоту когерентного гетеродина добавки доплеровської частоти перешкоди FДпом призводить до того, що коливання гетеродина перестають бути когерентними несучій частоті сигналів, відображених від місцевих предметів. В результаті сигнали на виході фазового детектора, як і сигнали цілі, від періоду до періоду повторення мають змінну амплітуду.
Звідси витікає, що СКВ повинна бути вимкнений протягом часу надходження на РЛС сигналів, відображених від місцевих предметів.
Пристрої обробки, що здійснюють розділення сигналів і перешкодових коливань, що заважають, на основі відмінності їх частотних характеристик, отримали назву пристроїв селекції рухомої цілі (СРЦ).

Рис.1. Пристрій обробки сигналів на фоні пасивних перешкод
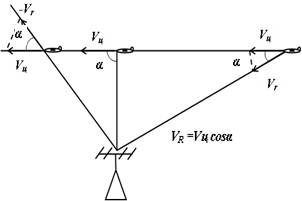 |
Рис.2. Радіальні складові швидкості цілі
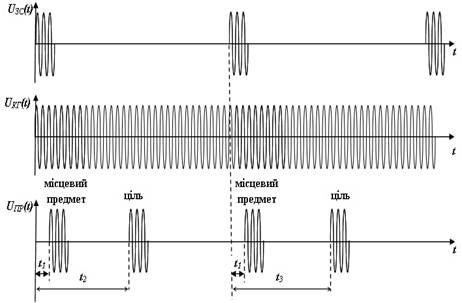 |
Рис.3. Фазові співвідношення зондуючих імпульсів, когерентного гетеродина
і імпульсів, відображених від місцевих предметів і цілі
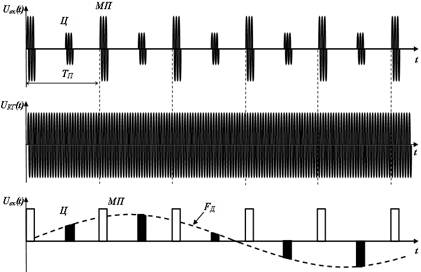
Рис. 4. Відеоімпульси на виході фазового детектора
|
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 594; Нарушение авторских прав?; Мы поможем в написании вашей работы!