КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Общие сведения о космических навигационных системах
|
|
|
|
.
Зона радиовидимости КА с судна
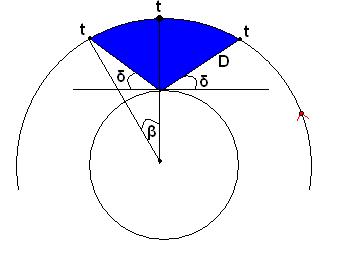
Рис 4
В зависимости от угла наклона (i) орбиты подразделяются на экваториальные (i = 0°), полярные (i= 90°) и наклонные (0°< i < 90° или 90< i <180°). За время одного оборота спутника вокруг Земли сама Земля в своем суточном движении повернется вокруг оси на угол порядка 26° (при Н = 1100 км).См Рис 2. Один низколетящий спутник на полярной орбите при своем обращении вокруг Земли последовательно появляется над всеми ее точками, т. е. обеспечивает полный (100%-ный) охват земной поверхности. Естественно, при этом низколетящий спутник способен обеспечить лишь дискретные обсервации. Дискретность их в лучшем случае равна периоду обращения ИСЗ вокруг Земли. Если за это время вследствие поворота Земли вокруг оси судно окажется за пределами полосы видимости, дискретность обсерваций скачкообразно увеличивается до 10—12 ч, в течение которых Земля повернется на пол-оборота, вновь приблизив меридиан наблюдателя к плоскости орбиты, неподвижной относительно инерциального пространства. Для уменьшения дискретности обсерваций и придания ей более равномерного характера, на равноудаленные по долготе полярные орбиты выводят не один, а несколько ИСЗ, которые поочередно появляются в зоне видимости судна.
Продолжительность наблюдения каждого спутника определяется, высотой орбиты, которая обусловливает размеры зоны видимости и скорость ее перемещения по земной поверхности, а также удалением судна от трассы движения ИСЗ: если судно находится на трассе, зона видимости будет пересекаться по диаметру и продолжительность наблюдения ИСЗ будет наибольшей (до 18 мин при Н — 1100 км); если судно удалено от трассы на некоторое расстояние, то зона видимости будет пересекаться уже не по диаметру, а по хорде, что значительно сокращает продолжительность наблюдения
Спутник, выведенный на синхронную (Н= 35 870 км) экваториальную орбиту, получил название стационарного, так как он неподвижно «висит» над заданной точкой земной поверхности. Его зона видимости не смещается; в пределах этой зоны ИСЗ может наблюдаться непрерывно в течение неограниченного интервала времени. При выводе на орбиту трех стационарных ИСЗ с разностью долгот 120° с любого меридиана земного шара всегда будет виден один из них. Так как для определения места судна по стационарным ИСЗ необходимо иметь в зоне видимости по крайней мере два спутника, минимальное для навигационной спутниковой системы число стационарных ИСЗ равно пяти с разностью долгот 72°. При этом широты φ > 81,3° не попадают в зону видимости.
Навигационный искусственный спутник Земли (НИСЗ) можно представить как навигационный ориентир, поднятый на высоту нескольких тысяч километров над поверхностью Земли и движущийся вокруг нее по своей орбите. Принципиальной основой использования ИСЗ в качестве навигационного ориентира является закономерный характер их движения, позволяющий предвычислять положение ИСЗ в пространстве на момент обсервации. Вывести ИСЗ на строго круговую орбиту практически невозможно. Правильная эллиптическая орбита ИСЗ характеризуется уже не двумя, а шестью элементами: большая и малая полуоси орбиты (либо большая полуось и эксцентриситет); угол наклона орбиты к плоскости экватора; долгота восходящего узла орбиты; аргумент перигея; время прохождения спутника через перигей. Зная эти «кеплеровские элементы орбиты», можно однозначно рассчитать положение спутника в пространстве на любой заданный момент времени.(эфемеридная информация 1 рода).
Однако реальная траектория движения ИСЗ также не является строго эллиптической: под действием различных возмущений спутник постоянно выходит как за пределы очередного эллипса в плоскости орбиты, так и из плоскости орбиты, которая в свою очередь также непрерывно изменяет свои параметры. Поэтому на практике расчет координат ИСЗ выполняется для правильной эллиптической орбиты, наиболее близкой к реальной траектории, а возмущения орбиты учитываются с помощью специальных поправок. Требования к точности расчета координат ИСЗ определяются требуемой точностью обсерваций: так как место судна определяется относительно спутника, точность такой навигационной системы принципиально не может быть выше, чем:точность определения координат самих ИСЗ на момент навигационных измерений.
Таким образом, спутниковые радионавигационные системы (СРНС) отличаются от обычных РНС тем, что их Опорные точки (ИСЗ) не фиксированы на земной поверхности, а закономерно движутся в окблоземном пространстве. Как и наземные РНС, по виду измеряемого навигационного параметра СРНС подразделяются на угломерные (измеряется угловая высота и азимут спутника), дальномерные, радиально-скоростные, разностно-дальномерные….. Как и в наземных РНС, навигационный параметр получают путем измерения и обработки радионавигационного параметра; по виду которого СРНС подразделяются на амплитудные, фазовые, импульсные, частотные. Частным видом частотных систем являются доплеровские, когда измеряемым радионавигационным параметром является не собственно частота, а ее изменение вследствие относительного перемещения судна и ИСЗ.
По объему выполняемых фунций спутниковые системы подразделяются на навигационные, предназначенные исключительно для определения места судна, системы связи, системы метеорологической информации, поисково-спасательные системы, системы управления морским и воздушным движением и т. п., а также комбинированные системы, которые позволяют выполнять одновременно несколько функций.
На судах морского флота для определения места используются спутниковые РНС доплеровского типа: отечественная система «Цикада» на спутниках серии «Космос-1000» и американская система «Транзит».
В настоящее время в РФ и США внедрена разработка спутниковых РНС второго поколения на базе ИСЗ на средневысоких орбитах (Н = 20 тыс. км). Для отработки элементов и аппаратуры СРНС, создаваемой в целях обеспечения определения местонахождения самолетов гражданской авиации и судов морского и рыболовного флота, в СССР 12 октября 1982 г. запущены ИСЗ «Космос» с Н = 19 100 км, I = 64,8°,
Т = 11 ч 13 мин.
В РФ вопросы развития и использования спутниковых систем координирует Всесоюзное объединение «Морсвязьспутник».
- Спутниковая РНС 1 поколения «Цикада».
СПУТНИКОВАЯ РНС ДОПЛЕРОВСКОГО ТИПА
Все спутниковые РНС доплеровского типа работают на одних и тех же принципах.
Глобальная пассивная всепогодная СРНС «Цикада» представляет собой сложный радиотехнический комплекс, включающий 5—6 ИСЗ на приполярных орбитах, близких к круговым, с высотой 1030— 1100 км (рис.), сеть наземных станций обеспечения и неограниченное число бортовых приемоиндикаторов. Искусственные спутники, обращающиеся вокруг Земли с периодом 105 мин имеют на борту систему питания, два передатчика, работающих на частотах 150 и 400 МГц, стандарт точного времени и частоты, блок памяти для хранения эфемеридной информации о положении спутника на орбите, приемо-передающие устройства командной и телеметрической информации, а также программно-временное устройство, координирующее работу всех бортовых систем. Передача сигналов со спутника ведется трехминутными «блоками», каждый из которых содержит всю информацию, необходимую для расчета координат ИСЗ на момент начала данного блока.
Информация состоит из двух частей — «постоянной» и «переменной». Постоянная часть служит для расчета координат ИСЗ на правильной эллиптической орбите, переменная часть содержит поправки к большой полуоси и истинной аномалии ИСЗ для учета отклонений реальной траектории от правильного эллипса. Начало каждого «блока» определяется передачей со спутника непрерывного немодулированного сигнала, который синхронизирован с системой всемирного времени (ПТС) с точностью до 200 мкс. Таким образом, навигационный ИСЗ системы «Цикада» одновременно является носителем навигационной информации, информации о своих координатах на обусловленные моменты времени (начало каждой четной минуты по Гринвичу) и датчиком сигналов точного времени.
Наземный комплекс входит в состав СРНС «Транзит» для обеспечения бесперебойного функционирования ИСЗ и включает в себя сеть станций слежения, координационно:вычислительный центр, станцию ввода командной информации. Расположенные на территории РФ станции слежения, координаты которых точно известны, с появлением ИСЗ в зоне видимости производят измерения доплеровского сдвига частоты (ДСЧ) принимаемого со спутника сигнала, а также проверку передаваемых со спутника сигналов точного времени по данным морской обсерватории. Серии измеренных значений ДСЧ и ошибки сигналовточного времени передаются на координационно-вычислительный центр, который является «мозгом» всей системы. Здесь по измеренным значениям ДСЧ и известным координатам станций слежения рассчитываются элементы орбиты ИСЗ, предвычисляется траектория его движения на 12—16 ч вперед и на этой основе составляется таблица постоянной и переменной информации, которую следует ввести в блок памяти ИСЗ. По величине и знаку ошибок в сигналах точного времени рассчитывается коррекция бортовых часов ИСЗ. Все эти данные передаются на станцию ввода командной информации. Как только данный ИСЗ в очередной раз появится в зоне видимости этой станции в блок его памяти вводится новая таблица постоянной и переменной информации, а бортовые часы выставляются заново и регулируются по скорости их ухода.
Приемоиндикатор установленный на борту судна обеспечивает прием сигналов ИСЗ; запись и обработку исходных На основе полученных данных ЭВМ рассчитывает координаты ИСЗ на момент каждого измерения, обсервованные значения навигационного параметра по измеренным отсчетам ДСЧ и в конечном итоге — обсервованные координаты судна, которые выводятся на цифровой индикатор-дисплей или печатаются на телетайпной ленте.
Определение места судна по измерениям доплеровского сдвига частоты может быть выполнено одним из двух методов,— дифференциальным или интегральным. Основным способом определения места судна является интегральный. Интегральный доплеровский метод по своей геометрической сущности является разностно-дальномерным. Базой системы служит расстояние между двумя последовательными положениями спутника на орбите в моменты начала и конца интервала интегрирования.
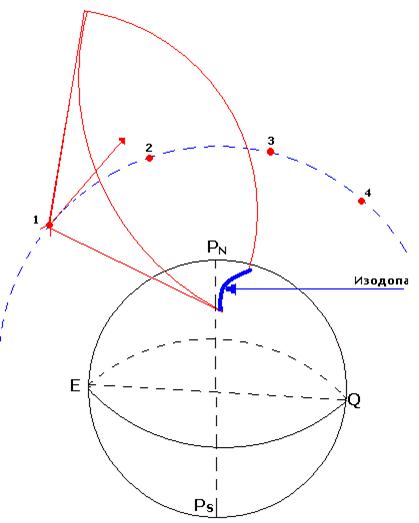
Рис №5
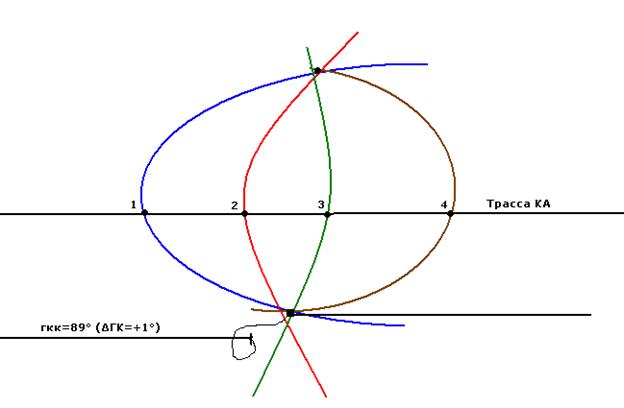
Рис№6
Как видно из рисунка 6 при определении места судна видна ситуация многозначности, которая в данном конкретном случае решается с учетом счисления.
|
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 895; Нарушение авторских прав?; Мы поможем в написании вашей работы!