КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Вращение вокруг начала координат
|
|
|
|
Eddy_em
November 25th, 2011
В прошлой записи я пытался при помощи Octave найти центр вращения поля, исходя из координат объектов на снимках, полученных последовательно с некоторым интервалом времени. Тот метод был непригоден в случае, если поле не только вращалось, но и смещалось. Здесь я изложу некоторые соображения, которые позволят (возможно) найти нужные параметры.
Итак, начнем с простейшего случая. Пусть мы имеем некий набор точек, расстояния между которыми постоянны (т.е. проще представить это в виде некоторого "жесткого" объекта). Каждая точка Pi задана координатами (xi, yi). Координаты точек будем обозначать в векторном виде: r i Повернем наш набор точек вокруг начала координат на некоторый угол:
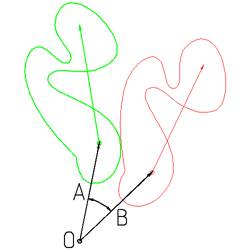
Вращение вокруг начала координат
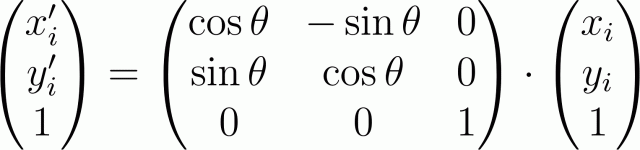
Каждая точка Pi, заданная вектором r i, переходит путем преобразования вращения в точку P'i, заданную вектором r 'i. Чтобы записать это преобразование в матричном виде, дополним вектора-столбцы, характеризующие каждую точку, единицей, а матрицу преобразования координат:
сделаем квадратной, заполнив недостающие элементы нулями, а правый нижний элемент главной диагонали - единицей:
Тогда получим в общем виде: r ' = Rr, где R - матрица поворота:
Это уравнение легко решается методом наименьших квадратов, в результате чего определяется угол поворота системы.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 907; Нарушение авторских прав?; Мы поможем в написании вашей работы!