КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 14. Анализ и синтез релейной системы методом фазовой плоскости
|
|
|
|
Рассмотрим систему стабилизации искусственного спутника Земли относительно продольной оси (рисунок 63).
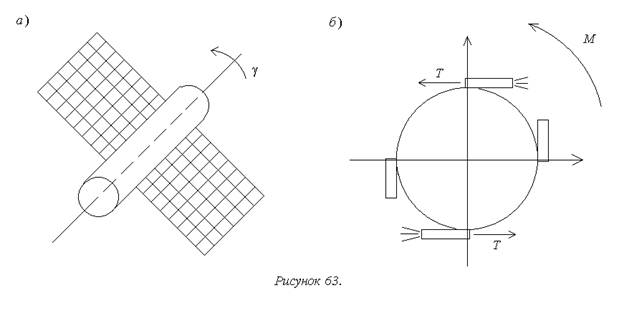
Для выполнения своих задач, например, ретрансляции телевизионного сигнала или обеспечения мобильной связи, спутник должен достаточно точно сохранять определенную ориентацию в пространстве, в частности по углу поворота относительно продольной оси (углу крена g, рисунок 63). В строгом смысле, необходимо обеспечивать определенное фиксированное значение угла крена при нулевой скорости поворота относительно продольной оси: g=gтреб.,  . При составлении математической модели процесса стабилизации обычно формально принимают gтреб.=0. В случае появления вследствие какого-либо внешнего воздействия отклонения от требуемого состояния его необходимо восстановить. Таким образом, необходимо построить систему стабилизации с устойчивым состоянием равновесия gтреб.=0.
. При составлении математической модели процесса стабилизации обычно формально принимают gтреб.=0. В случае появления вследствие какого-либо внешнего воздействия отклонения от требуемого состояния его необходимо восстановить. Таким образом, необходимо построить систему стабилизации с устойчивым состоянием равновесия gтреб.=0.
Составим математическую модель объекта управления. В качестве фазовых переменных будем рассматривать угол крена x 1=g и угловую скорость  . Управление угловым движением спутника обеспечивается посредством создания двигателями системы ориентации момента силы M (рисунок 63). Угловое движение объекта управления описывается линейными дифференциальными уравнениями, получаемыми на основе второго закона Ньютона для вращательного движения:
. Управление угловым движением спутника обеспечивается посредством создания двигателями системы ориентации момента силы M (рисунок 63). Угловое движение объекта управления описывается линейными дифференциальными уравнениями, получаемыми на основе второго закона Ньютона для вращательного движения:
 ;
;
 ,
,
 , (14.1)
, (14.1)
 где J – момент инерции спутника относительно продольной оси,
где J – момент инерции спутника относительно продольной оси,  - управляющий сигнал (рисунок 64). На рисунке ОУ – объект управления (спутник), УУ – устройство управления.
- управляющий сигнал (рисунок 64). На рисунке ОУ – объект управления (спутник), УУ – устройство управления.
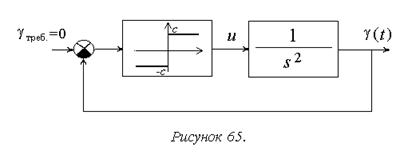
На малых космических летательных аппаратах с целью минимизации массо-габаритных характеристик применяются наиболее простые системы управления двигательными установками, не предусматривающие плавного регулирования силы тяги двигателей. Обеспечивается только их включение на режим постоянной тяги или выключение в зависимости от текущих значений фазовых переменных. Рассмотрим сначала простейший вариант релейного управления по отклонению регулируемой переменной от требуемого значения без учета измерения ее производной, инерционности устройства управления, а также характерных для релейных регуляторов запаздывания и зоны нечувствительности (рисунок 65).
На рисунке и ниже используется обозначение:  .
.
Таким образом, смена значений управляющего сигнала u=±c происходит при изменении знака выходного сигнала g, то есть по условию x 1 = g=0. Это уравнение определяет на фазовой плоскости особую линию нового, то есть не рассмотренного в предыдущих лекциях вида – линию переключения.
Закон управления в соответствии с рисунком 65 имеет вид:
 . (14.2)
. (14.2)
Подставляя в (14.1) значения управления в соответствии с (14.2), получим уравнения фазовых траекторий для двух областей, разделенных линией переключения.
При x 1>0 уравнения (14.1) примут вид:
,
 .
.
Их решение
 ,
,

позволяет получить уравнение фазовых траекторий:
 ,
,
 ,
,
 . (14.3)
. (14.3)
Фазовые траектории имеют вид парабол, симметричных относительно оси x 1, ветви парабол направлены влево.
При x 1<0:
,
 ;
;
 ,
,
 ;
;
 ,
,
 ,
,
 . (14.4)
. (14.4)
Фазовые траектории имеют вид парабол, симметричных относительно оси x 1, ветви парабол направлены вправо.
 При достижении изображающей точкой линии переключения сигнал управления скачкообразно изменяется. В соответствии с основным положением «метода припасовывания» фазовые переменные при этом сохраняют свои значения. То есть достигнутые к этому моменту времени значения фазовых переменных оказываются начальными условиями для следующего временного интервала, и фазовые траектории «сшиваются» на линии переключения (рисунок 66).
При достижении изображающей точкой линии переключения сигнал управления скачкообразно изменяется. В соответствии с основным положением «метода припасовывания» фазовые переменные при этом сохраняют свои значения. То есть достигнутые к этому моменту времени значения фазовых переменных оказываются начальными условиями для следующего временного интервала, и фазовые траектории «сшиваются» на линии переключения (рисунок 66).
По рисунку можно убедиться, что стабилизация объекта не обеспечивается. В системе имеет место незатухающий колебательный процесс, характеристики которого зависят от начальных условий.
Теперь учтем зону нечувствительности статической характеристики УУ, обусловленную, по крайней мере, характеристиками измерителей угла g. В этом случае закон управления принимает вид, показанный на рисунке 67.
Теперь на фазовой плоскости будут две линии переключения с уравнениями x 1= -b и x 1= b. Фазовые траектории, описываемые уравнением (14.3) будут соответствовать области x 1> b, уравнение (14.4) будет соответствовать области x 1< -b.
В области фазовой плоскости, соответствующей зоне нечувствительности, -b< x 1< b, получим:
,
 ;
;
 ,
,
 . (14.5)
. (14.5)
Соответствующие фазовые траектории представляют собой горизонтальные прямые, направленные в верхней полуплоскости вправо, в нижней – влево. Фазовый портрет для такого закона управления представлен на рисунке 68.
Из рисунка видно, что амплитуда колебаний за счет зоны нечувствительности увеличивается.
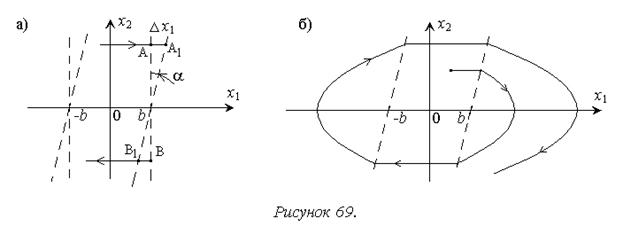
Теперь учтем запаздывание, характерное для любого процесса включения или выключения, то есть для релейных законов управления. Примем величину запаздывания при включении и выключении двигателей системы ориентации постоянной и равной t.
На рисунке 69 а точка А соответствует достижению фазовой переменной x 1 границы зоны нечувствительности x 1= b, когда должно произойти включение двигателей. Поскольку к этому моменту времени движение по фазовой траектории происходит с постоянной скоростью, равной текущему значению вертикальной координаты x 2, то за счет запаздывания точка переключения сместится вправо на величину D x 1=t× x 2 в точку А1, то есть в первом квадранте линия переключения повернется по часовой стрелке на угол  и примет наклонное положение. Аналогичный поворот будет иметь место в третьем квадранте.
и примет наклонное положение. Аналогичный поворот будет иметь место в третьем квадранте.
Аналогичный эффект на фазовой плоскости вызывает запаздывание при выключении двигателей, после которого движение происходит по горизонтальным траекториям в нижней полуплоскости, то есть с постоянной отрицательной скоростью. Выключение двигателей в точке В1 должно было произойти в точке В, соответствующей уменьшению фазовой переменной x 1 до границы зоны нечувствительности b. Расстоянию во времени между этими точками величиной t соответствует расстояние вдоль прямолинейной фазовой траектории величиной D x 1=t×| x 2|. Следовательно, во втором и четвертом квадрантах линии переключения также поворачиваются на угол  по часовой стрелке.
по часовой стрелке.
Фазовая траектория при наличии запаздывания показана на рисунке 69 б. Система стабилизации при этом становится неустойчивой.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 773; Нарушение авторских прав?; Мы поможем в написании вашей работы!