КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Реактивные шаговые двигатели
|
|
|
|
У активных шаговых двигателей есть один существенный недостаток: у них крупный шаг, который может достигать десятков градусов. Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса. Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
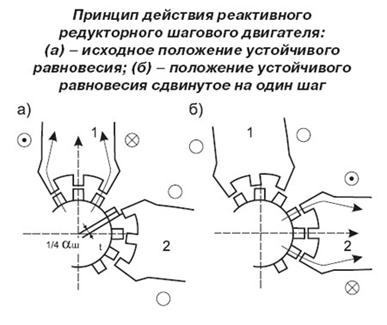
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора. Величина углового шага редукторного реактивного шагового двигателя определится выражением:αш=360/КтZр В выражении для KT величину n2 следует брать равной 1, т.к. изменение направления поля не влияет на положение ротора. Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя. Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора. Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного коммутатора.
Линейные шаговые двигатели
При автоматизации производственных процессов весьма часто необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т.д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма. Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов.
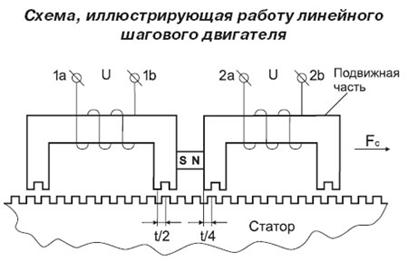
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом.
Зубцовые деления статора и подвижной части двигателя равны. Зубцовые деления в пределах одного магнито-провода ротора сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя. Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т.е. на четверть зубцового деления t/4.ΔXш=tz/Кtгде Kt — число тактов схемы управления. Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели. В линейных шаговых двигателях применяют магнито-воздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между статором и ротором создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
Схемы управления. Управление ШД, как уже отмечалось, обеспечивается электронным блоком.
Современные блоки управления ШД состоят из нескольких функциональных узлов, выполняемых по различным схемам и с использованием разнообразных элементов. Стремление расширить область применения дискретного привода, повысить качество и точность его движения, а также надежность, упростить наладку и эксплуатацию отразилось в унификации схем управления ШД.
Рассмотрим обобщенную функциональную схему ЭП с ШД. Основная ее часть, обычно называемая разомкнутой схемой, выделена штриховой линией.
Сигнал управления  в виде импульсов напряжения поступает, а вход блока 2 от программного или другого внешнего командного устройства. Блок 2 видоизменяет эти импульсы, формируя их по длительности и амплитуде, как необходимо для нормальной работа последующих блоков схемы управления. Распределитель импульсов 3 преобразует последовательность сформированных импульсов, например в четырехфазную систему однополярных импульсов напряжения, соответствующую числу фаз (обмоток) двигателя.
в виде импульсов напряжения поступает, а вход блока 2 от программного или другого внешнего командного устройства. Блок 2 видоизменяет эти импульсы, формируя их по длительности и амплитуде, как необходимо для нормальной работа последующих блоков схемы управления. Распределитель импульсов 3 преобразует последовательность сформированных импульсов, например в четырехфазную систему однополярных импульсов напряжения, соответствующую числу фаз (обмоток) двигателя.
 Импульсы с выхода распределителя 3 усиливаются с помощью промежуточного усилителя 4 и поступают на коммутатор 5, питающий обмотки ШД 8. Обычно коммутатор питается от источника постоянного тока (выпрямителя) 12 и обеспечивает в обмотках ШД пульсирующий ток одного направления.
Импульсы с выхода распределителя 3 усиливаются с помощью промежуточного усилителя 4 и поступают на коммутатор 5, питающий обмотки ШД 8. Обычно коммутатор питается от источника постоянного тока (выпрямителя) 12 и обеспечивает в обмотках ШД пульсирующий ток одного направления.
Рассмотренная разомкнутая схема управления ШД не всегда обеспечивает высокие динамические свойства, точность и энергетические показатели ЭП. Поэтому современные схемы управления ШД содержат дополнительные узлы, с помощью которых характеристики ЭП улучшаются. К таким узлам относятся частотно - импульсный регулятор напряжения 11, усилитель обратной связи тока, блок электронного дробления шага 13, блок плавного разгона и торможения (задатчик интенсивности) 1, датчик положения ротора и скорости 7, и цифровой регулятор б.
Регулятор 11 и усилитель 10, связанные с узлом сравнения 9, служат для автоматической стабилизации тока в обмотках ШД и подержания его момента, что существенно улучшает энергетические показатели работы двигателя. Стабилизация тока осуществляется введением отрицательной обратной связи по току, с помощью которой за счет регулирования частоты переключения регулятора (частотно-импульсная модуляция) изменяется среднее значение напряжения питания и тем самым регулируется ток в обмотках ШД.
Задача формирования тока в обмотках ШД решается также при использовании коммутатора 5, обладающего свойствами источника тока. В этом случае отпадает надобность в обратной связи току и блоках 11 и 10.
Для улучшения качества движения ШД при низких частотах повышения точности отработки входных импульсов управления помощью блока 13 уменьшается единичный шаг ШД.
Улучшение динамических свойств дискретного ШД, в частности увеличение диапазона рабочих частот входного сигнала, значительно превышающих частоту приёмистости двигателя, может быть достигнуто введением в схему блока 1, обеспечивающего разгон и торможение двигателя с заданным темпом, при котором еще не происходит пропускание управляющих импульсов. При использовании блока 1 область рабочих частот шагового электропривода может бы увеличена в 2... 3 раза.
Возможности дискретного ЭП расширяются при использовании замкнутых схем управления на основе датчика 7 и регулятора 6. В таком дискретном приводе информация о действительном положении вала и скорости ШД поступает на вход цифрового регулятора б, который обеспечивает заданный характер движения привода. Перспективы дальнейшего развития ЭП с ШД связаны с использованием микропроцессорных средств управления. В этом случае функции всех показанных на рисунке блоков управления, за исключением силового коммутатора, датчиков скорости и положения, выполняет микропроцессор по соответствующей программе. Как говорят в таких случаях, аппаратная реализация схемы управления ШД заменяется более гибкой и функционально богатой — программной.
Область применения дискретного привода постоянно расширяется. Его используют кроме указанных ранее случаев в резательных и сварочных автоматах, часах, нажимных устройств прокатных станов, лентопротяжных и регистрирующих устройствах, в медицинской технике, в производстве элементов микроэлектроники и др.
|
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 2658; Нарушение авторских прав?; Мы поможем в написании вашей работы!