КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
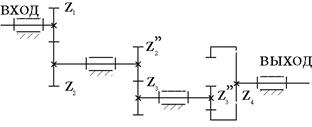
Ступенчатые рядные механизмы
|
|
|
|
Применяются в устройствах для понижения скоростей (редукторах), для повышения скоростей (мультипликаторах), коробках переменных передач и т.д.
| 
|
 =? =?
| |
 ;
;  ;
;  (8)
(8)
Перемножим в выражениях (8) друг на друга левые, средние и правые части:
 (9)
(9)

 (10)
(10)
Здесь (-1)g – множитель для определения знака i1n, g – число внешних зацеплений
Частный случай: при  ;
;  ; и т.д. получим:
; и т.д. получим:
 (11)
(11)
z2, z3, z4 … z(n-1) не влияют на величину передаточного отношения. Такие колеса называются паразитными (потери), а механизмы паразитным рядом.
Для уменьшения габаритов передачи применяются
2. Планетарные механизмы (ω≥1)
Имеется хотя бы одно зубчатое колесо с подвижной геометрической осью. Такое колесо называется сателлитом.
Все планетарные механизмы делятся на две группы:
Дифференциальные механизмы (ω≥2); и планетарные передачи (ω=1)
А) Дифференциальные механизмы
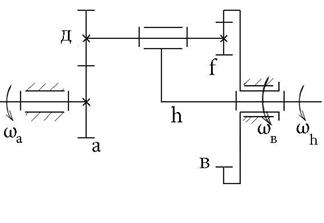
| х-х – основная ось |
| а,в – центральные колеса (солнечные колеса) | |
| g,f – сателлит (в данном случае двухвенцовый) | |
| h – водило |
nw = 3
Все сателлиты кроме одного являются пассивными звеньями и их на схеме не изображают.
а,в,h – основные звенья, их признаки:
1)вращаются вокруг собственной оси
2)воспринимают нагрузки от внешних моментов
Число степеней свободы w определяется:
 ,т.е. имеются 2-обобщенные координаты (положение звеньев будет характеризоваться углами поворота двух любых основных звеньев).
,т.е. имеются 2-обобщенные координаты (положение звеньев будет характеризоваться углами поворота двух любых основных звеньев).
Для проведения кинематического анализа диф. механизма используется метод инверсии.
Метод состоит в мысленной остановке подвижного звена механизма при сохранении относительных движений всех звеньев
Так если всему механизму мысленно задать вращение с угловой скоростью (-ωh), равной, но противоположной угловой скорости ωh водила h, то водило как бы, остановится, а механизм из планетарного превратится в простой рядный с неподвижными осями колес
|
|
|
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 363; Нарушение авторских прав?; Мы поможем в написании вашей работы!