КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Создание реалистичных изображений изделий
|
|
|
|
Разработка технологических эскизов технологических процессов
Для создания технологических эскизов удобно использовать те элементы чертежей, полученных с помощью трехмерных моделей, которые представляют обрабатываемые поверхности. В этом случае технолог не затрачивает время на рутинное перечерчивание необходимого для эскиза контура, а только лишь его редактирует, выделяя поверхности для обработки и указывая требуемые технологические базы, размерные параметры с отклонениями, шероховатость поверхностей, требования к операции и заполняет основную надпись технологического эскиза.
Реалистичное изображение – компьютерное изображение изделия с высоким качеством (фотографическим), которое может быть использовано в различных сценах. Обычно используется для рекламы изделий, которые еще только спроектированы, но не изготовлены. Подсистема создания реалистичных изображений изделий на основании их твердотельных моделей(например, Photo Works) позволяет: задавать свойства поверхностей (цвет, текстуру, коэффициент отражения, прозрачность с использованием библиотеки материалов (библиотека может быть пополнена пользователем самостоятельно) или присоединением текстуры (картинок, логотипов), задавать декорации (каждая модель связывается со сценой, для которой можно задавать свойства: освещение, тени, фон). На основе информации о расставленных источниках света генерируются тени и полутени, придающие необычайную достоверность компьютерному изображению еще не существующей реально конструкции.
Автоматизированное создание прототипов проектируемых изделий (Rapid Prototyping)
Эти методы предназначены для создания реальных моделей изделий с помощью их компьютерных моделей за короткое время с целью проверки их работоспособности перед запуском их в производство и с целью использования этих моделей в производстве изделий (например, в качестве моделей литейных форм).
Принцип заключается в создании трехмерной модели изделия и представлении ее в виде отдельных поперечных двухмерных профилей, так называемых, срезов малой толщины (0,1-0,5 мм), параметры которых передаются в систему ЧПУ специального комплекса, с помощью которого формируется реальная модель каждого среза, набор которых образует реальную модель изделия – его прототип. Создание прототипа осуществляется на специальном основании (подложке), которое после изготовления каждого среза опускается на толщину среза. На основании этого метода разработан ряд способов изготовления прототипов:
- стереолитографии;
- покрытие твердой массой;
- из слоев специальной бумаги или фольги;
- селективное спекание с помощью лазера;
- наплавлением.
Стереолитография ( Stereolithography - STL). Прототип изготавливается на подложке в емкости, заполненной жидким полимером (так называемым, фотополимером), который затвердевает под воздействием лазерного луча. Лазер установлен рабочем органе, управление перемещением которого осуществляется от системы ЧПУ. Программа перемещения лазера составляется на основании сечений отдельных слоев трехмерной твердотельной модели изделия. Лазер сканирует очередной слой, в результате чего на этом участке полимер затвердевает, после чего подложка опускается на толщину среза и этот процесс выполняется для последующего сечения до тех пор, пока не будет изготовлен прототип изделия.
Способ покрытия твёрдой массой (Solid Ground Curing - SGC) не требует использования лазера и включает выполнение двух параллельно выполняемых процесса: создание маски и нанесение слоя фотополимера. Создание маски осуществляется для каждого среза трехмерной твердотельной модели методом электростатического осаждения материала, не прозрачного для прохождения ультрафиолетового излучения на прозрачную пластину маски. Затем на подложку наносится жидкий полимер затвердевающий под влиянием ультрафиолетового излучения. Пластина с маской помещается над подложкой с фотополимером и осуществляется освещение фотополимера ультрафиолетовым излучением через маску, в результате чего освещенный участок фотополимера затвердевает. Затем незатвердевший фотополимер удаляется, а на его место наносится слой легкоплавящегося материала, (например, воска) с целью уменьшения коробления. С пластины удаляется маска и создается следующая маска, соответствующая сечению последующего слоя модели. Процесс повторяется. По окончании цикла изготовления прототипа изделия слой легкоплавящегося материала удаляется горячей жидкостью.
Процесс создания объектов из слоёв специальной бумаги или фольги (Laminated Objekt manufacturing – LOM), покрытой клеевым составом, требует применения лазера. Каждый слой создается путем подачи бумаги в рабочую зону, вырезания контура соответствующего среза лазерным лучем и склеивания его с предыдущим слоем в результате обкатки горячим роликом. Материал: синтетическая фольга, алюминиевая фольга, керамическая фольга, ткань из углеродистого волокна.
Селективное спекание с помощью лазера (Selective Laser Sintering - SLS) заключается в последовательном нанесении слоев порошка из термопластичного материала и спекания каждого слоя под воздействием лазерного луча программно-управляемого лазера. Используется порошковый материал, в качестве чего принципиально могут использоваться все термопластичные материалы, как например, термопласты, воск для точного литья, металлы, формопесок.
Создание объектов наплавлением (Fused Deposition Modelling - FDM) не требует применения лазера и заключается в создании каждого слоя наплавлением термопластичного материала с помощью нагреваемого сопла, перемещение которого осуществляется с помощью устройства с ЧПУ.
Материал: термопластичная пластмасса, специальный воск для точного литья.
Использование трехмерных моделей для расчета изделий методами имитационного моделирования
Имитационное моделирование заключается в создании модели проектируемого объекта и экспериментирования с ней при реальных условиях и ограничениях.
Имитация в САПР осуществляется путем создания модели проектируемого объекта и наблюдения за его функционированием до реального его изготовления с целью нахождения его рациональных параметров. Различают кинематическую и динамическую имитацию.
Кинематическая имитация осуществляется с целью проверки работоспособности объекта в процессе движения его элементов (проверка коллизий, например, столкновений). Примеры: контрольные сборки, работа движущегося механизма.
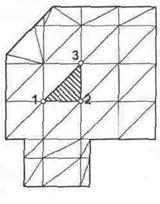
Динамическая имитация осуществляется путем исследования поведения объекта при изменении действующих на него нагрузок и температур. Определяются теплонапряженное состояние и деформации элементов объекта. Применение при таких расчетах аналитических моделей, полученных методами математической физики, применительно к сложным по конфигурации объектам, в настоящее время невозможно, так как при этом необходимо принимать ограничения, которые зачастую нарушают адекватность математической модели объекта. Поэтому для решения задач динамической имитации в САПР используют приближенные методы: метод конечных элементов (МКЭ) и метод конечных разностей (МКР). Как показала практика, МКЭ является самым эффективным методом решения задач имитационного моделирования в САПР. В основе этого метода лежит представление объекта исследования в виде набора некоторых простых с геометрической точки зрения фигур, называемых конечными элементами, взаимодействующими между собой только в узлах. Расположенные определенным образом (в зависимости от конструкции объекта) и закрепленные в соответствии с граничными условиями конечные элементы, форма которых определяется особенностями моделируемого объекта, позволяют описать все многообразие механических конструкций и деталей.
|
Например, плоскую ферменную конструкцию можно смоделировать набором плоских стержневых фигур, рамную - набором объемных стержневых элементов, различного рода пластины и оболочки - множеством плоских треугольников или прямоугольников. Геометрически объемные тела удобно представлять в виде совокупности элементарных пирамид, параллелепипедов и призм.
Такое представление рассматриваемого объекта позволяет решать задачи расчета напряженного и деформированного состояний тела, устойчивости и динамики, нахождения частот и амплитуд собственных и вынужденных колебаний.
Программное обеспечение для решения задач методом МКЭ должно включать в себя следующие элементы: редактор разбивки на конечные элементы, ядро, непосредственно обеспечивающее решение, и визуализатор для демонстрации полученных результатов.
|
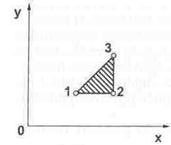
Рассмотрим физические основы этого метода на примере решения плоской задачи теории упругости - расчета напряженного состояния тонкой пластины произвольной формы. В качестве конечного элемента примем плоский элемент треугольной геометрической формы.
Рассмотрим конечный элемент, координаты узлов
которого равны  и
и  . После приложения внешней нагрузки тело деформируется, и каждая внутренняя точка этого элемента с координатами х,у занимает новое положение, перемещаясь в направлении координатных осей х и у соответственно на расстояния u(х,у) и v(x,y), причем в пределах одного конечного элемента эти перемещения представляются в виде линейных функций координат:
. После приложения внешней нагрузки тело деформируется, и каждая внутренняя точка этого элемента с координатами х,у занимает новое положение, перемещаясь в направлении координатных осей х и у соответственно на расстояния u(х,у) и v(x,y), причем в пределах одного конечного элемента эти перемещения представляются в виде линейных функций координат:


, (1)

или, в матричной форме,
 , (2)
, (2)
где  ;
;  ;
;
 .
.
Необходимо отметить, что задание перемещений в виде линейных функций (1) обеспечивает сшивку этих функций на границах соседних элементов, так как линейность перемещений в узлах означает и их линейность везде вдоль границы элемента.Подставляя в (2) координаты узловых точек, получаем:
 ,
,
или
 , (3)
, (3)
где  .
.
В системе уравнений (3) в качестве неизвестных можно рассматривать постоянные коэффициенты  . Разрешая (3) относительно с помощью формул Крамера, имеем:
. Разрешая (3) относительно с помощью формул Крамера, имеем:
 (4)
(4)
Здесь  - определитель матрицы системы,численно равный площадиконечного элемента:
- определитель матрицы системы,численно равный площадиконечного элемента:
Заметим, что тот же самый результат (4) получается и другим способом: поскольку определитель матрицы отличен от нуля, то единственное решение системы (3) есть произведение обращенной матрицы системы и вектора Подстановка (4) в (3) приводит к выражению для определения поля перемещений произвольной точки данного конечного элемента:
Подстановка (4) в (3) приводит к выражению для определения поля перемещений произвольной точки данного конечного элемента:
 (5)
(5)
где  а остальные коэффициенты находятся путем циклической перестановки индексов 2 и 3. В матричной форме (5) переписывается как:
а остальные коэффициенты находятся путем циклической перестановки индексов 2 и 3. В матричной форме (5) переписывается как:
 (6)
(6)
Функция  , имеющая вид:
, имеющая вид:
 (7)
(7)
называется функцией формы.
Компоненты вектора - столбца  относительной деформации связаны с перемещениями соотношениями:
относительной деформации связаны с перемещениями соотношениями:
С другой стороны, используя (6) и (7), можно написать
 (8)
(8)
где  - вектор узловых перемещений,
- вектор узловых перемещений, 

 ;
; 
Перемещения связаны с соответствующими напряжениями законом Гука, который для случая плоского нагружения записывается в виде:
 , (9)
, (9)
где
Уравнение (9) с учетом (6) принимает следующий вид:
 (10)
(10)
Воспользуемся выражением для потенциальной энергии деформации элементарного объема (13). Тогда эта энергия, с учетом (10), определится из очевидного уравнения:
 . (11)
. (11)
Выражение для объема в уравнении (11) представляет собой, в случае плоской задачи, произведение площади конечного элемента на его толщину.
Энергия деформации элемента объема может быть рассчитана иначе - какработа внешних сил. В качестве внешней нагрузки на элемент объема можно принять реакции приложенные к граням этого элемента, тогда:
 (12)
(12)
Из уравнения (12) легко определить реакции, выполнив ряд очевидных сокращений, тогда
 (13)
(13)
где
 . (14)
. (14)
Уравнение (13) представляет собой обычное уравнение равновесия, а матрица  является квадратной размерности 6х6. Она называется матрицей жесткости конечного элемента,
является квадратной размерности 6х6. Она называется матрицей жесткости конечного элемента,
Элементы этой матрицы получаются решением матричного уравнения (14):
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 .
.
Глобальная матрица жесткости может быть найдена поэлементным суммированием матриц жесткости отдельных элементов и имеет размерность  , где N - общее количество узлов разбиения.
, где N - общее количество узлов разбиения.
Левую часть уравнения равновесия (13) составляет вектор силовых факторов  , компоненты которого в количестве
, компоненты которого в количестве  равны силам, действующим в узлах. Учет распределенной нагрузки производится равномерным ее распределением по узлам, расположенным на границе.
равны силам, действующим в узлах. Учет распределенной нагрузки производится равномерным ее распределением по узлам, расположенным на границе.
|
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 347; Нарушение авторских прав?; Мы поможем в написании вашей работы!