КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Астатические системы с обратной связью по состоянию
|
|
|
|
Метод размещения полюсов при нулевом задающем воздействии приводит к статической системе. Введение прямой связи по задающему воздействию позволяет добиться астатизма. Однако полученная система теряет астатические свойства при изменении параметров ОУ. Рассмотрим еще один метод проектирования астатической системы с обратной связью по состоянию, свободный от этого недостатка.
В соответствии с принципом внутренней модели для безошибочного воспроизведения в установившемся режиме постоянного задающего воздействия v (t) =v0 = const замкнутая система с единичной обратной связью должна включать в себя хотя бы одно интегрирующее звено (один интегратор). Этот принцип можно осуществить и в рамках метода размещения полюсов.
Пусть ОУ с одним входом и одним выходом описывается уравнениями
 ,
,  . (1)
. (1)
Обозначим через v 0 = const желаемое установившееся значение для управляемой величины y.
Интегратор можно ввести в рассмотрение, используя новую скалярную переменную состояния
 ,
,
являющуюся интегралом от ошибки управления
 .
.
Отсюда получаем скалярное дифференциальное уравнение
 .
.
Расширенный таким образом ОУ с двумя входами v (t) и u (t), и составным вектором состояния  описывается следующим уравнением состояния
описывается следующим уравнением состояния

Для нового ОУ можно решить задачу размещения полюсов с помощью обратной связи по расширенному состоянию. При этом управление имеет вид
 .
.
Операционная структурная схема замкнутой системы с интегратором и обратной связью по состоянию представлена на рисунке.
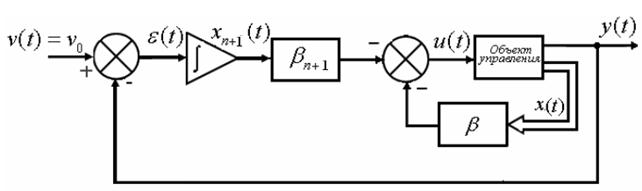
Если полюсы расширенной замкнутой системы являются левыми (система устойчивая), то  при v (t) = const и тогда в установившемся состоянии
при v (t) = const и тогда в установившемся состоянии  . Разумеется, что обеспечить любое расположение полюсов замкнутой системы можно только тогда, когда расширенный объект полностью управляем.
. Разумеется, что обеспечить любое расположение полюсов замкнутой системы можно только тогда, когда расширенный объект полностью управляем.
|
|
|
Поскольку собственные значения матрицы 
 являются непрерывной функцией ее элементов, то ошибка в установившемся состоянии будет нулевой, если замкнутая система устойчивая, даже при наличии малых погрешностей в модели объекта (малых ошибок моделирования), т.е. имеет место робастный астатизм.
являются непрерывной функцией ее элементов, то ошибка в установившемся состоянии будет нулевой, если замкнутая система устойчивая, даже при наличии малых погрешностей в модели объекта (малых ошибок моделирования), т.е. имеет место робастный астатизм.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 442; Нарушение авторских прав?; Мы поможем в написании вашей работы!