КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Статика и кинематика
|
|
|
|
Учебное пособие
Статика.
ЛЕКЦИЯ 1
Теоретическая механика – это наука, в которой изучаются общие законы механического движения и механического взаимодействия материальных тел.
Механическим движением называется перемещение одного тела по отношению к другому, происходящее в пространстве и во времени.
Механическим взаимодействием называется такое взаимодействие материальных тел, которое изменяет или стремится изменить характер их механического движения.
Статика – это раздел механики, в котором изучаются методы преобразования систем сил в эквивалентные системы и устанавливаются условия равновесия сил, приложенных к твердому телу.
Основные понятия и определения,
Материальное тело, размеры которого в рассматриваемых конкретных условиях можно не учитывать, называется материальной точкой.
Материальная точка обладает массой и способностью взаимодействовать с другими телами.
Системой материальных точек называется такая совокупность материальных точек, в которой положение и движение каждой точки зависят от положения и движения других точек этой системы.
В теоретической механике часто рассматривают тела, расстояние между любыми точками которых, остаются неизменными. Такие тела называются абсолютно твердыми. Понятие об абсолютно твердом теле – есть абстрактная модель. Принимая эту модель в качестве объекта исследования, пренебрегают возможными изменениями формы и размеров тела под действием нагрузок: считая, что
1) деформации малы – ими можно пренебречь;
2) условия равновесия сил, приложенных к абсолютно твердому телу являются необходимыми условиями равновесия любого деформируемого тела.
Важнейшим понятием в теоретической механике является понятие силы.
Сила – это мера механического взаимодействия тел, определяющая интенсивность и направление этого взаимодействия.
Сила определяется тремя элементами: числовым значением, направлением и точкой приложения. Сила изображается вектором ( ) За единицу силы принимается Ньютон (
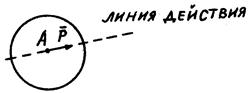
) За единицу силы принимается Ньютон ( ). Прямая, по которой направлена сила называется линией действия силы.
). Прямая, по которой направлена сила называется линией действия силы.
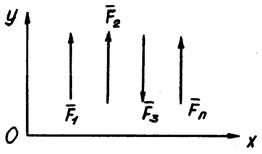
Совокупность нескольких сил, действующих на данное тело называется системой сил
( )
)
Если не нарушая состояния тела, одну систему сил () можно заменить другой системой ( ) и наоборот, то такие системы сил называются эквивалентными
) и наоборот, то такие системы сил называются эквивалентными
() ~ ()
В том случае, когда система сил () эквивалентна одной силе  , то есть () ~ , то последняя называется равнодействующей этой системы сил.
, то есть () ~ , то последняя называется равнодействующей этой системы сил.
Если абсолютно твердое тело остается в состоянии покоя при действии на него системы сил (), то последняя называется уравновешенной системой сил или системой сил эквивалентной нулю
() ~ 0
Часто в этом случае говорят, что тело находится в равновесии.
Силы, действующие на материальную систему делятся на 2 группы: внешние и внутренние.
Внешними называются силы, действующие на материальные точки данной системы со стороны материальных точек, не принадлежащих этой системе. (обозначаем -  ).
).
Внутренними называются силы взаимодействия между материальными точками рассматриваемой системы. (обозначаем -  ),
),
Аксиомы статики.
Аксиома 1.
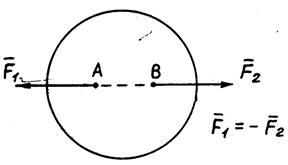
Две силы, приложенные к абсолютно твердому телу, будут уравновешены тогда и только тогда, когда они равны по модулю, действуют по одной прямой и направлены в противоположные стороны.
Аксиома 2.
Не нарушая состояния абсолютно твердого тела, к нему можно прикладывать или отбрасывать силы тогда и только тогда, когда они составляют уравновешенную систему. Следствие. Не нарушая состояния тела, точку приложения силы можно перекосить вдоль ее линии действия (сила - вектор скользящий).
Доказательство
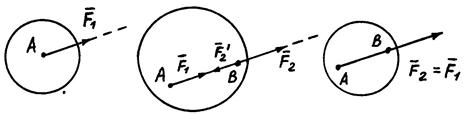
Пусть сила  приложена в точке А. Приложим в точке В, на линии действия силы две уравновешенные силы
приложена в точке А. Приложим в точке В, на линии действия силы две уравновешенные силы  ~ 0, полагая, что
~ 0, полагая, что  .
.
Согласно аксиоме 2
~  ,
,
но система ~ 0 и следовательно, её можно отбросить, т.е. ~  , что и требовалось доказать. В результате на тело будет действовать только одна сила , но приложенная в точке В.
, что и требовалось доказать. В результате на тело будет действовать только одна сила , но приложенная в точке В.
Аксиома 3.
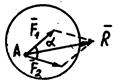
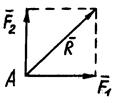
He меняя состояния тела, две силы, приложенные к одной его точке можно заменить одной равнодействующей силой, приложенной в той же точке и равной их геометрической сумме
1) 

2) 

3) 


Аксиома 4.
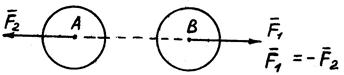
Силы взаимодействия двух тел равны по модулю и направлены по одной прямой в противоположные стороны.
Аксиома 5.
Равновесие деформируемого тела на нарушится, если жестко связать его точки и считать тело абсолютно твердым.
Связи, Реакции связей.
Тело называется свободным, если его перемещения в пространстве ничем не ограничены. Тело, перемещения которого ограничены другими телами, называется несвободным, а тела, ограничивающие перемещения данного тела, называются связями. В точках контакта возникают силы взаимодействия между данным телом и связями. Силы, с которыми связи действуют на данное тело, называются реакциями связей.
Одним из основных положений механики является принцип освобождаемости твердых тел от связей, согласно которым всякое несвободное тело можно рассматривать как свободное, если действие связей заменить реакциями их, приложенными к данному телу.
Реакция любой связи направлена противоположно тому направлению, в котором связь ограничивает перемещение тела.
Основные виды связей.
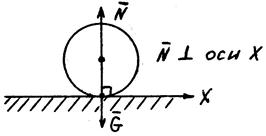
1) Идеально гладкая поверхность.
2) Гибкая связь (трос, нить, цепь, канат).
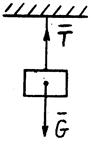
Реакция гибкой связи направлена по нити к точке подвеса.
3) 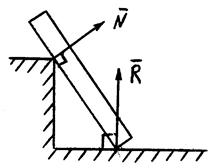
Твёрдое тело имеет гладкую поверхность и опирается на остриё или упирается остриём.
4) Цилиндрическая шарнирно-неподвижная опора (подшипник).
Реакция такой опоры имеет произвольное направление в плоскости, раскладываем её на две составляющие  .
.
5) Цилиндрическая шарнирно-подвижная опора.
6) Невесомый стержень, на концах которого шарниры.
7) Сферический шарнир.
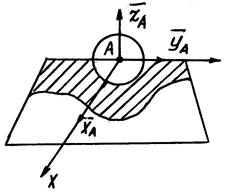
Шар, который может вращаться как угодно внутри сферической полости. Центр шара остается неподвижной точкой, через которую проходит линия действия реакции. Реакция имеет произвольное направление в пространстве, раскладываем ее на 3 взаимно-перпендикулярных составляющих  .
.
8) Подпятник.
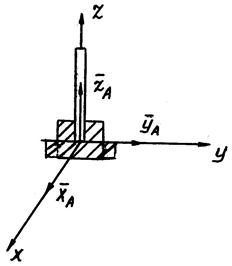
Реакция имеет произвольное направление в пространстве, раскладываем ее на три взаимно-перпендикулярных составляющих
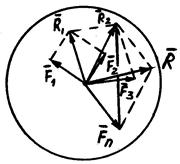
Система сходящихся сил.
Сходящимися называются силы, линии действия которых пересекаются в одной точке. Система сходящихся сил эквивалентна одной силе, равнодействующей, которая равна геометрической сумме этих сил и проходит через точку пересечения их линией действия.
Доказательство:
Пусть задана система сходящихся сил  , приложенных к абсолютно твердому телу. Согласно следствию из аксиомы 2 перенесем точки приложения сил по линиям их действия в точку пересечения этих линий. Получаем систему сил, приложенных в одной точке. Она эквивалентна исходной системе сходящихся сил.
, приложенных к абсолютно твердому телу. Согласно следствию из аксиомы 2 перенесем точки приложения сил по линиям их действия в точку пересечения этих линий. Получаем систему сил, приложенных в одной точке. Она эквивалентна исходной системе сходящихся сил.
 (1)
(1)
Геометрический способ построения равнодействующей.
Строим силовой многоугольник: от конца отложим от его конца и так далее. Затем соединим начало первого вектора с концом последнего. Полученный вектор и есть .

Обе части (1) спроектируем на оси  .
.
 (2)
(2)
Модуль равнодействующей  (3)
(3)
Направление равнодействующей определяется направляющими косинусами. 


 – единичные орты осей соответственно.
– единичные орты осей соответственно.
Условия равновесия системы сходящихся сил
При приведении системы сходящихся сил к центру было показано, что такая система эквивалентна одной равнодействующей  .
.
Из определения уравновешенной системы сил следует, что для равновесия тела, находящегося под действием системы сходящихся сил, необходимо и достаточно, чтобы  .
.
Это означает, что в силовом многоугольнике уравновешенной системы сходящихся сил конец последней силы должен совпадать с началом первой, то есть многоугольник замкнут. Равенство (*) на основании (3) с учетом (2) выполняется при условии, что
 или
или  (4)
(4)
Для равновесия системы сходящихся сил необходимо и достаточно, чтобы алгебраические проекции всех сил данной системы на координатные оси равнялись нулю.
Для плоской системы сходящихся сил система (4) принимает вид:
 (5)
(5)
ЛЕКЦИЯ 2
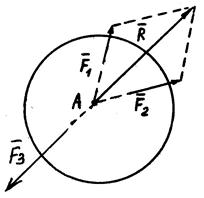
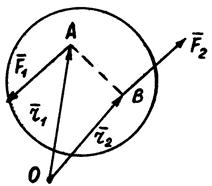
Теорема о 3-х непараллельных силах
Если тело находится в равновесии вод действием 3-х непараллельных сил и линии действия двух сил пересекаются, то все силы лежат в одной плоскости и их линии действия пересекаются в одной точке.
Доказательство:
Пусть на тело действует система трех сил  , причем линии действия сил
, причем линии действия сил  пересекаются в точке А. Согласно аксиоме 3 их можно заменить одной силой .
пересекаются в точке А. Согласно аксиоме 3 их можно заменить одной силой . 
Таким образом, рассматриваемая система сил приведена к двум силам и  . По условиям теоремы тело находится в равновесии, следовательно, по аксиоме 1 силы и должны иметь общую линию действия, но тогда линии действия всех трех сил должны пересекаться в одной точке.
. По условиям теоремы тело находится в равновесии, следовательно, по аксиоме 1 силы и должны иметь общую линию действия, но тогда линии действия всех трех сил должны пересекаться в одной точке.
Момент силы относительно центра (или точки).
Опыт показывает, что под действием силы твердое тело может наряду с поступательным перемещением совершать вращение вокруг того или иного центра. Вращательный эффект силы характеризуется ее моментом.
Моментом силы относительно центра называется вектор равный векторному произведению радиуса-вектора точки приложения силы на вектор силы.
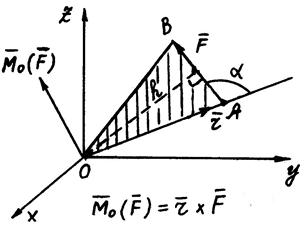 (6)
(6)
Вектор-момент силы  относительно точки 0 приложен в ()0. Его модуль равен:
относительно точки 0 приложен в ()0. Его модуль равен:  . В общем случае, момент силы относительно центра алгебраически равен взятому со знаком "+" или "–" произведению модуля силы на плечо силы.
. В общем случае, момент силы относительно центра алгебраически равен взятому со знаком "+" или "–" произведению модуля силы на плечо силы.
 (7)
(7)
Плечом силы называется перпендикуляр, проведенный из ()0 на линию действия силы.
Знак "+" выбираем в том случае, если кратчайший поворот силы вокруг данного центра виден происходящим против стрелки часов, знак "–" – в противном случае.
В общем случае направление вектора момента силы относительно центра определяется знаком векторного произведения (6).
Согласно (7) можно утверждать, что  .
.
Свойства момента силы относительно точки
1. Момент силы не изменяется при переносе точки приложения силы вдоль ее линии действия.
2. Момент силы равен нулю, тогда и только тогда, когда линия действия силы проходит через центр 0.
Согласно (7):
 (*)
(*)
Здесь – координаты точки приложения силы;  – проекции силы. Из (*) следует, что проекции момента силы на координатные оси определяются по формулам
– проекции силы. Из (*) следует, что проекции момента силы на координатные оси определяются по формулам
Размерность  – ньютон метр.
– ньютон метр.
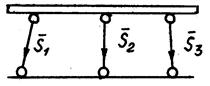
Параллельные силы.
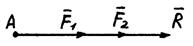
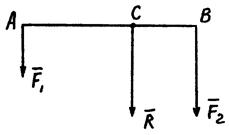
Система двух сил, направленных в одну сторону имеет равнодействующую, параллельную этим силам, причем ее модуль равен сумме модулей слагаемых сил; линия действия равнодействующей делит расстояние между точками приложения слагаемых сил внутренним образом на части, обратно пропорциональные модулям этим сил.


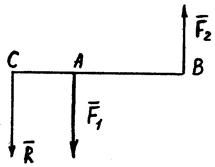
Две, не равные по модулю,  , противоположно направленные силы, имеют равнодействующую, параллельную этим силам; причем ее модуль равен разности модулей слагаемых сил; линия действия равнодействующей делит расстояние между точками приложения слагаемых сил внешним образом на части, обратно пропорциональные модулям этим сил
, противоположно направленные силы, имеют равнодействующую, параллельную этим силам; причем ее модуль равен разности модулей слагаемых сил; линия действия равнодействующей делит расстояние между точками приложения слагаемых сил внешним образом на части, обратно пропорциональные модулям этим сил


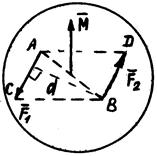
Пара сил. Основные понятия и определения.
Парой сил называют систему двух равных по величине, параллельных сил, направленных в противоположные стороны.
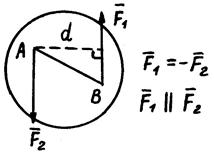
Расстояние  между линиями действия сил пары называется плечом пары. Плоскость, в которой действуют силы пары, называется плоскостью действия пары. Совокупность нескольких пар, действующих на тело, называется системой пар.
между линиями действия сил пары называется плечом пары. Плоскость, в которой действуют силы пары, называется плоскостью действия пары. Совокупность нескольких пар, действующих на тело, называется системой пар.
Пара сил, действующая на тело, стремится сообщить ему некоторое вращение. Вращательный эффект пары характеризуется величиной, называемой моментом пары.
Моментом пары сил называется вектор, величина которого равна произведению силы пары на плечо пары и который направлен перпендикулярно плоскости действия пары так, чтобы с направления этого вектора видеть стремление пары сил вращать тело против движения часовой стрелки.
 (*)
(*)
Величина векторного момента пары сил численно выражается величиной площади ð , построенного на силах пары.
, построенного на силах пары. 
Вектор-момент можно представить в виде:
 (8)
(8)
Из (8) следует (*) и наоборот.
Теоремы теории пар сил.
Теорема 1.
Геометрическая сумма моментов сил, входящих в состав пары  относительно любой точки, не зависит от выбора точки, и равна векторному моменту этой пары сил.
относительно любой точки, не зависит от выбора точки, и равна векторному моменту этой пары сил.

Доказательство:
Возьмем произвольный центр 0 и проведем из него радиусы-векторы  точек А и В. Учитывая, что
точек А и В. Учитывая, что  , можно записать
, можно записать
Так как  не зависит от выбора точки 0, следовательно, геометрическая сумма
не зависит от выбора точки 0, следовательно, геометрическая сумма  также не зависит от выбора точки 0.
также не зависит от выбора точки 0.
Теорема 2.
Вектор-момент пары – вектор свободный.
Доказательство:
Согласно теореме о моментах сил пары имеем: .Таким образом, вектор момент пары как геометрическая сумма двух связанных векторов  и
и  можно считать также связанным, приложенным в точке 0. Но центр 0 был выбран произвольно, поэтому и точка приложения вектора
можно считать также связанным, приложенным в точке 0. Но центр 0 был выбран произвольно, поэтому и точка приложения вектора  также является произвольной.
также является произвольной.
Следовательно, вектор-момент пары – вектор свободный.
На основании этой теоремы и известных из векторной алгебры признаков свободных векторов, можно записать следующие свойства пар сил:
1. у пары сил можно произвольным образом менять модули сил и плечо, оставляя неизменным ее момент;
2. пару сил можно перемещать как угодно в ее плоскости;
3. пару сил можно переносить в любую плоскость параллельную плоскости этой пары.
Из доказанной теоремы вытекают также известные условия эквивалентности пар:
1.  пары сил в пространстве эквивалентны, если их векторы-моменты геометрически равны между собой;
пары сил в пространстве эквивалентны, если их векторы-моменты геометрически равны между собой;
2.  пары сил на плоскости эквивалентны, если их моменты численно равны и одинаковы по знаку.
пары сил на плоскости эквивалентны, если их моменты численно равны и одинаковы по знаку.
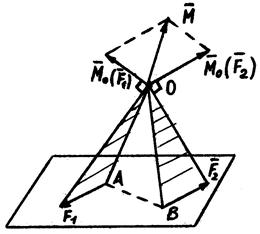
Теорема 3.
Две пары сил, действующие на одно и тоже тело и лежащие в пересекающихся плоскостях, можно заменить одной эквивалентной парой сил, момент которой равен геометрической сумме моментов данных пар сил*
Доказательство:
Пусть имеются две пары сил  и
и  , лежащие в пересекающихся плоскостях. Эти нары сил можно получить из пар сил, как угодно расположенных в пересекающихся плоскостях путем параллельного переноса, поворота в плоскости действия и одновременного изменения плеч и сил пар. Согласно аксиоме 3 имеем
, лежащие в пересекающихся плоскостях. Эти нары сил можно получить из пар сил, как угодно расположенных в пересекающихся плоскостях путем параллельного переноса, поворота в плоскости действия и одновременного изменения плеч и сил пар. Согласно аксиоме 3 имеем


Силы и  составляют пару сил, так как они приложены в разных точках и
составляют пару сил, так как они приложены в разных точках и  как равнодействующие равных, но противоположно направленных сил.
как равнодействующие равных, но противоположно направленных сил.
Вычислим момент пары 

где  – момент пары ,
– момент пары ,  – момент пары , т.е.
– момент пары , т.е.  .
.
Момент эквивалентной пары сил равен геометрической сумме
векторных моментов заданных пар.
Из теоремы 3 вытекает правила сложения пар сил:
1.  Чтобы сложить две пары сил, лежащие в пересекающихся плоскостях, надо сложить их векторные моменты геометрически
Чтобы сложить две пары сил, лежащие в пересекающихся плоскостях, надо сложить их векторные моменты геометрически
 .
.
2. Чтобы сложить пары сил, действующие на твердое тело и расположенные в одной плоскости, необходимо алгебраически сложить моменты составляющих пар сил  .
.
Условия равновесия пар сил.
Если на твердое тело действует несколько пар сил, как угодно расположенных в пространстве, то согласно теореме 3 эти пары сил, можно заменить одной эквивалентной парой, момент которой
 (*)
(*)
Таким образом, момент эквивалентной пары – есть замыкающая сторона векторного многоугольника, построенного на векторных моментах заданных пар сил.
Для равновесия сил пар сил, действующих на твердое тело, необходимо и достаточно, чтобы величина момента эквивалентной пары равнялась 0, или чтобы векторный многоугольник был замкнут.
Модуль момента эквивалентной пары
где  (**)
(**)
Но  ,
,
если  или с учётом (**)
или с учётом (**)
 (9)
(9)
Для равновесия пар сил, приложенных к твердому телу, необходимо и достаточно, чтобы алгебраические суммы проекций векторов моментов пар сил на координатные оси равнялись нулю.
Условия равновесия (9) упрощаются, если все пары лежат в одной плоскости. В этом случае все моменты перпендикулярны этой плоскости, поэтому (*) достаточно спроектировать только на одну ось, например ось  , перпендикулярную плоскости пар.
, перпендикулярную плоскости пар.
Тогда из (*) получим:

или
 (10)
(10)
ЛЕКЦИЯ 3
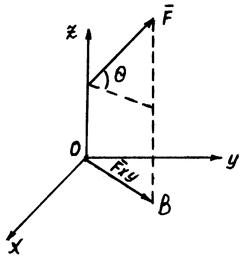
Проекцией силы на плоскость  называется вектор
называется вектор  , заключенный между проекциями начала и конца силы
, заключенный между проекциями начала и конца силы  на эту плоскость.
на эту плоскость.
По модулю  где
где  – угол между направлением силы и ее проекции
– угол между направлением силы и ее проекции 
Момент силы относительно оси.
Моментом силы относительно оси называется момент проекции силы на плоскость перпендикулярную оси относительно точки пересечения оси и плоскости. 
Момент будем считать положительным, если с положительного конца оси поворот, который сила  стремиться совершить, виден происходящим против хода часовой стрелки. Момент силы относительно оси равен нулю, если:
стремиться совершить, виден происходящим против хода часовой стрелки. Момент силы относительно оси равен нулю, если:
1. сила параллельна оси;
2. линия действия силы пересекает ось
Зависимость между моментами силы относительно точки и оси,
проходящей через эту точку.
Согласно определению, имеем

Для момента силы относительно оси можно записать
 – проекция
– проекция  на плоскость перпендикулярную оси .
на плоскость перпендикулярную оси .
Следовательно  . Умножим обе части записанного равенства на 2.
. Умножим обе части записанного равенства на 2.  или
или
 (11)
(11)
То есть, проекция вектора момента силы относительно центра на ось, проходящую через центр равна моменту силы относительной этой оси.
Аналитическое выражение моментов силы относительно оси
 (*)
(*)
Для вектора момента силы относительно центра с учетом (II) можно записать:
 (**)
(**)
Левые части (*) и (**) равны, приравниваем правые:
где – координаты точки приложения силы.
Главный вектор системы сил.
Главным вектором системы сил называется геометрическая сумма сил системы.

Главный момент пространственной системы сил
относительно центра и оси.
Рассмотрим систему сил ( ), как угодно ориентированных в пространстве. Вычислим моменты этих сил относительно точки 0.
), как угодно ориентированных в пространстве. Вычислим моменты этих сил относительно точки 0.
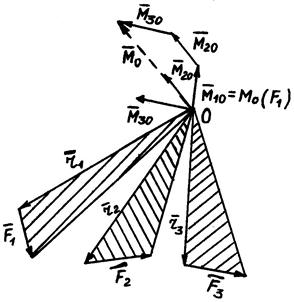
Векторы моменты  . все приложены в точке 0. Построим многоугольник векторов моментов.
. все приложены в точке 0. Построим многоугольник векторов моментов.
Замыкающая сторона этого многоугольника – главный момент относительно неподвижного центра
 (12)
(12)
Таким образом, главным моментом пространственной системы силы относительно центра называется геометрическая сумма моментов сил системы относительно того же центра.
Главным моментом пространственной системы сил относительно неподвижной оси называется алгебраическая сумма моментов сил системы относительно той же оси

Приведение силы к заданному центру
(метод Пуансо)
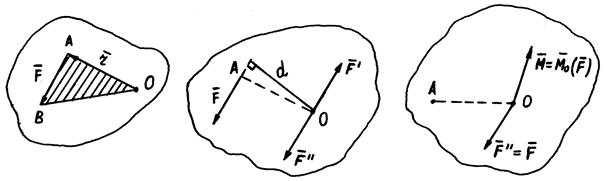
Приведём сиу к центру 0. приложим в точке 0 систему сил  , причём выбираем
, причём выбираем

Силы  образуют пару, момент которой
образуют пару, момент которой

При приведении силы к заданному центру получаем в этом центре силу, геометрически равную заданной и пару сил, момент которой равен моменту силы относительно центра приведения.
Приведение пространственной системы сил к заданному центру,
Теорема.
При приведении пространственной системы сил к центру всегда получим силу, называемую главным вектором системы сил, приложенную в центре приведения, и пару сил, момент которой равен главному моменту системы сил относительно центра приведения.
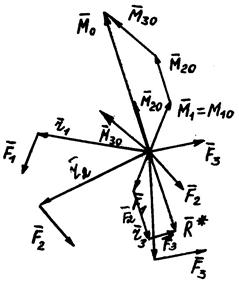
Доказательство:
Пусть имеем систему сил, как угодно ориентированных в пространстве (ограничимся тремя силами).
Каждую силу приводим к центру 0 на основании метода Пуансо. В точке 0 получим систему сходящихся сил . Геометрическая сумма этих сил есть главный вектор:
Векторы моменты  также образуют систему сходящихся векторов. Их геометрическая сумма есть главный момент системы сил относительно центра.
также образуют систему сходящихся векторов. Их геометрическая сумма есть главный момент системы сил относительно центра.

Вычисление главного вектора и главного момента
пространственной системы сил,
Главный вектор
Спроектируем обе части этого векторного соотношения на оси .
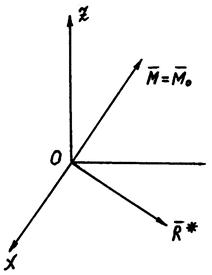
 (13)
(13)
Тогда модуль  равен
равен
 (14)
(14)
Направление определяется направляющими косинусами:
 ;
;  ;
;  .
.
Главный момент  . Спроектируем данное векторное соотношение на оси :
. Спроектируем данное векторное соотношение на оси :
 (15)
(15)
Модуль главного момента равен
 (16)
(16)
Направление определяем направляющими косинусами:
 ;
;  ;
;  .
.
Условия и уравнения равновесия пространственной системы сил
Теорема.
Для равновесия пространственной системы сил необходимо и достаточно, чтобы главный вектор и главный момент равнялись нулю.
Доказательство:
Достаточность.
При  система сходящихся сил, приложенных в центре приведения 0, эквивалентна нулю, а при
система сходящихся сил, приложенных в центре приведения 0, эквивалентна нулю, а при  – система пар сил эквивалентна нулю. Следовательно, исходная система сил эквивалентна нулю.
– система пар сил эквивалентна нулю. Следовательно, исходная система сил эквивалентна нулю.
Необходимость.
Пусть данная система сил эквивалентна нулю. Тогда необходимо, чтобы , .
Если какое-либо из этих условий не выполняется, то система сил приводится либо к , либо к паре, момент которой  , и следовательно, не является уравновешенной, что противоречит исходной предпосылке.
, и следовательно, не является уравновешенной, что противоречит исходной предпосылке.
Получим уравнения равновесия произвольной пространственной системы сил, если , , согласно (14) и (16):


Или с учётом (13) и (15), имеем уравнения равновесия пространственной системы сил:
 (17)
(17)
ЛЕКЦИЯ 4
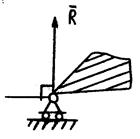
Заделка.
Заделка – особый вид связи, препятствующий не только линейным перемещениям закрепленной точки тела, но и повороту вокруг этой точки.
Рассмотрим жесткую заделку левого конца балки АВ.

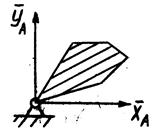
Этот конец оказывается полностью закрепленным – не возможны его вертикальное и горизонтальное перемещения, а также и поворот. Такая связь создает систему реакций, состоящую из двух составляющих и пары, момент которой обозначен через  .
.
Это следует из того, что на заделанный конец балки действует распределенная нагрузка, которую можно привести к силе, приложенной в точке А, и паре сил с моментом .
Следовательно, реакция заделки складывается из двух взаимно перпендикулярных составляющих и пары, момент которой подлежит определению.
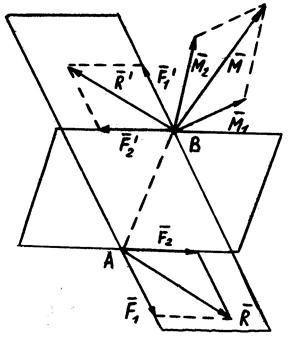
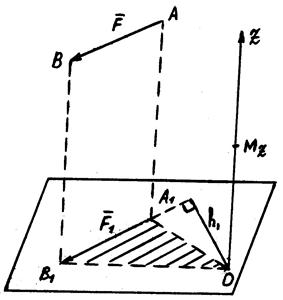
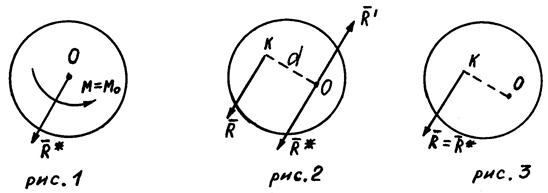
Частные случаи приведения плоской системы сил
к заданному центру.
Согласно доказанной выше теореме при приведении произвольной плоской системы сил к центру 0 получим главный вектор  и пару силу, момент которой равен алгебраической сумме моментов сил относительно центра приведения .
и пару силу, момент которой равен алгебраической сумме моментов сил относительно центра приведения .
В результате приведения системы сил к данному центру могут встретиться следующие случаи:
1.  – система сил находится в равновесии.
– система сил находится в равновесии.
2.  – произвольная плоская система сил приводится к паре, момент которой равен главному моменту ФОРМУЛА.
– произвольная плоская система сил приводится к паре, момент которой равен главному моменту ФОРМУЛА.
3.  – произвольная плоская система сил приводится к равнодействующей, линия действия которой проходит через центр приведения 0.
– произвольная плоская система сил приводится к равнодействующей, линия действия которой проходит через центр приведения 0.
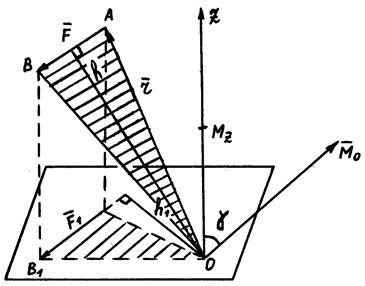
4.  . Докажем, что в»том случае система сил также приводится к равнодействующей
. Докажем, что в»том случае система сил также приводится к равнодействующей
Силы пары с моментом  выберем следующим образом: будем считать их по модулю равными
выберем следующим образом: будем считать их по модулю равными  и одну из сил пары
и одну из сил пары
приложим в точке 0 (рис. 2). Плечо пары  . Система сил
. Система сил  и, согласно аксиоме 2, ее можно отбросить (рис. 3). Следовательно, система сил приводится к равнодействующей, геометрически равной главному вектору
и, согласно аксиоме 2, ее можно отбросить (рис. 3). Следовательно, система сил приводится к равнодействующей, геометрически равной главному вектору  . Причем линия действия равнодействующей проходит через точку К, отстоящую от точки 0 на расстоянии
. Причем линия действия равнодействующей проходит через точку К, отстоящую от точки 0 на расстоянии 
Теорема Вариньона,
Момент равнодействующей силы относительно любого центра равен алгебраической сумме моментов составляющих сил относительно того же центра.
Доказательство:
(смотри рис. 3)

Главный вектор и равнодействующая.
Главный вектор, как геометрическая сумма сил, приложен в центре приведения, но не имеет строго определенной линии действия; он эквивалентен системе сил в совокупности с главным моментом.
Равнодействующая имеет строго определенную линию действия, она одна эквивалентна системе сил.
Условия и уравнения равновесия плоской системы сил.
Для равновесия плоской системы сил необходимо и достаточно, чтобы и  . Но
. Но  , тогда, когда
, тогда, когда  . Или, уравнения равновесия имеют вид:
. Или, уравнения равновесия имеют вид:
 (18)
(18)
Другие формы уравнений равновесия:
 (19)
(19)
Точки А и В не должны лежать на прямой, перпендикулярной оси 
 (20)
(20)
Точки А, В, С не лежат на одной прямой.
Плоская система параллельных сил.
Уравнения равновесия (18) и (19) принимают вид:
 (21)
(21)
и  (22)
(22)
Прямая АВ не параллельная линии действия сил, то есть оси  .
.
Статически определенные и статически неопределенные задачи.
Статически определенными задачами называются задачи, в которых число неизвестных реакций приложенных связей не превышает числа уравнений равновесия, содержащих эти реакции.
Статически неопределенными задачами называются задачи с числом неизвестных, превышающих число уравнений равновесия сил.
Распределенные нагрузки.
Кроме сосредоточенных сил встречаются нагрузки, распределённые вдоль данной поверхности по тому или иному закону. Величина силы, приходящейся на единицу длины загруженного участка, называется интенсивностью  . Размерность
. Размерность  .
.
Равномерно-распределенная нагрузка вдоль отрезка прямой.
При статических расчетах эту систему сил можно заменить равнодействующей  .
.  .
.
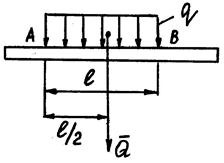
Линия действия равнодействующей приложена в середине отрезка АВ.
Неравномерно - распределенная нагрузка
(силы распределены вдоль отрезка прямой по линейному закону).
Равнодействующая таких сил 
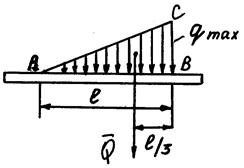
Линия действия проходит через центр тяжести треугольника АВС.
Силы, распределённые вдоль отрезка прямой
по произвольному закону
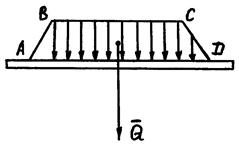
Если закон распределения нагрузки произвольный, то величина равнодействующей пропорциональна площади ABCD,  ; линия действия равнодействующей проходит через центр тяжести фигуры ABCD.
; линия действия равнодействующей проходит через центр тяжести фигуры ABCD.
Равновесие составной конструкции,
Рассмотрим задачу о нахождении опорных реакций трёхшарнирной арки, состоящей из двух частей I и II, соединенных шарниром С.
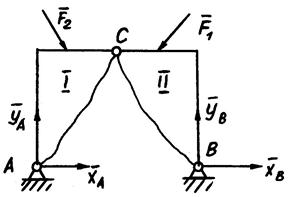
Система сил, действующих на арку – произвольно-плоская. Для нее можно составить три уравнения равновесия, неизвестных четыре –  . Задача статически неопределенная.
. Задача статически неопределенная.
Чтобы сделать ее статически определенной, следует расчленить конструкцию, действие отброшенных частей заменить силами, удовлетворяющими условию:


Кинематика.
ЛЕКЦИЯ 5
Кинематикой называется раздел механики, в котором изучается движение материальных точек и тел в пространстве с геометрической точки зрения, вне связи с силами, определяющими это движение.
Мы будем изучать простейшую форму движения – механическое движение, то есть происходящее во времени изменение положения одного тела относительно другого, с которым связана система координат, называемая системой отсчета.
Эта система может быть как движущейся, так и условно неподвижной.
Рассматривая движение, мы связываем изменение положения тела или точки с течением времени.
При изучении движения всегда устанавливаем начало отсчета времени  .
.
Непрерывную кривую, которую описывает точка при своем движении, называют траекторией.
Если траектория – прямая линия, то движение называется прямолинейным, если кривая – криволинейным.
Способы задания движения.
Задать движение точки по отношению к избранной системе отсчета – это значит указать способ, при помощи которого можно определить положение точки в любой момент времени. Существуют три способа задания движения:
1. Векторный способ
Положение точки в пространстве однозначно определяется заданием радиуса-вектора  , проведенного из некоторого неподвижного центра 0 в данную точку М.
, проведенного из некоторого неподвижного центра 0 в данную точку М.
Для определения движения точки нужно знать, как изменяется с течением времени , то есть должна быть известна функция
 (1)
(1)
Годографом какого-либо вектора называют кривую, которую вычерчивает конец этого вектора при изменении его аргумента (предполагается, что начало вектора находится в одной и той же точке).
Таким образом, годографом радиуса-вектора является траектория точки.
2. Координатный способ
Положение точки М в системе отсчета ОХУ определяется декартовыми координатами .
При движении точки М ее координаты изменяются с течением времени. Следовательно, координаты движущейся точки, являются функциями времени.
 (2)
(2)

Эти уравнения называются уравнениями движения точки в декартовых координатах.
Пусть движение точки М в плоскости задано уравнениями

Из первого уравнения выразим время  и подставим во второе:
и подставим во второе:  – уравнение траектории точки.
– уравнение траектории точки.
3. Естественный способ задания движения.
Этот способ применяется в том случае, если траектория точки заранее известна. Выберем на траектории неподвижную точку 0, которую назовём началом отсчёта дуговой координаты.
Положение точки М на траектории будем определять дуговой координатой  , отложенной на траектории от начала отсчета 0. Расстояния, отложенные в одну сторону от точки 0, будем считать положительными, в другую – отрицательными, то есть установим направление отсчета дуговой координаты.
, отложенной на траектории от начала отсчета 0. Расстояния, отложенные в одну сторону от точки 0, будем считать положительными, в другую – отрицательными, то есть установим направление отсчета дуговой координаты.
При движении точки М расстояние от этой точки до неподвижной точки 0 изменяется с течением времени:
 (3)
(3)
– уравнение движения точки М.
Скорость точки
1. При векторном способе задания движения
Пусть в момент времени  положение точки М определяется
положение точки М определяется  , а в момент
, а в момент  –
–  .
.
Вектор  будем называть вектором перемещения точки за время
будем называть вектором перемещения точки за время  . Отношение
. Отношение  к называется средней скоростью за промежуток времени .
к называется средней скоростью за промежуток времени .  (4)
(4)
Скоростью точки в данный момент времени называется предел отношения вектора перемещения точки к промежутку времени, за которое при стремлении этого промежутка времени к нулю.
 (5)
(5)
Скорость точки – это вектор, направленный по касательной к траектории в сторону движения.
2. При координатном способе задания движения.
Пусть движение точки задано координатным способом

Тогда для радиуса-вектора точки М можно записать
 (*)
(*)
где – единичные орты осей соответственно.
Согласно (5)  дифференцируем (*)
дифференцируем (*)
 (**)
(**)
Для вектора  справедливо соотношение:
справедливо соотношение:
 (***)
(***)
где  – проекции
– проекции  на оси .
на оси .
Сравнивая (**) и (***), получим
 (6)
(6)
Модуль скорости точки
 (7)
(7)
Направление скорости определяется направляющими косинусами:
3. При естественном способе задания движения
Пусть в момент времени положение точки М определяется координатой , в момент  –
–  .
.
Согласно (5)
 (*)
(*)
Вычислим модуль и определим направление  :
:

Вектор направлен так же, как . При  направление этого вектора стремится к направлению касательной к траектории в точке М. Обозначим единичный орт касательной через
направление этого вектора стремится к направлению касательной к траектории в точке М. Обозначим единичный орт касательной через  .
.
Таким образом  , следовательно
, следовательно  , так как
, так как  .
.
И равенство (*) принимает вид:
 (8)
(8)
Модуль  , направление совпадает с .
, направление совпадает с .
ЛЕКЦИЯ 6
Ускорение точки.
1. При векторном способе задания движения
Предположим, что в момент времени скорость, точки –  , а в момент –
, а в момент –  .
.
Предел приращения скорости к приращению времени , за которое произошло это приращение, при условии, что  , называется ускорением точки в данный момент времени
, называется ускорением точки в данный момент времени
 (9)
(9)
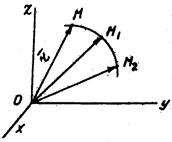
Годографом скорости называется кривая, которую вычерчивает конец вектора скорости при движении точки, если вектор скорости проводится из одной и той же точки.
2. При: координатном способе задания движения
Вектор скорости точки
С учетом.(9)
 (*)
(*)
На для вектора ускорения точки имеем
 (**)
(**)
Сравнивая (*) и (**), получим

Модуль ускорения точки
Направление вектора ускорения определяется направляющими косинусами
3. При естественном способе задания движения
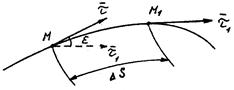
Пусть известна траектория точки. Возьмем две близкие на траектории точки М и М1  . Проведем касательные к траектории в точках М и М1 – и
. Проведем касательные к траектории в точках М и М1 – и  .
.
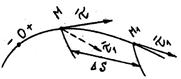
Вектор перенесем в точку М параллельно ему самому и проведем плоскость через и . Эта плоскость называется соприкасающейся плоскостью.
Плоскость, перпендикулярная ( ) касательной, называется нормальной плоскостью.
) касательной, называется нормальной плоскостью.
Плоскость нормальной и соприкасающейся плоскостям называется спрямляющей плоскостью.
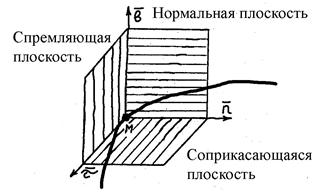
Три взаимно перпендикулярных плоскости: нормальная, соприкасающаяся, спрямляющая образуют естественный трехгранник.
Линия пересечения нормальной и соприкасающейся плоскостей называется главной нормалью. Орт главной нормали –  .
.
Линия пересечения нормальной и спрямляющей плоскостей называется бинормалью траектории. Орт бинормали –  .
.
Три взаимно перпендикулярные оси: касательная, направленная в сторону возрастания дуговой координаты, главная нормаль, направленная в сторону вогнутости траектории, бинормаль, направленная по отношению к и так же, как ось по отношению к осям  , называются естественными осями.
, называются естественными осями.
Угол между касательными в двух ближайших точках траектории называется углом смежности,  .
.
Кривизной кривой в точке М называется предел отношения угла смежности к абсолютному значению длины дуги ММ1 между ближайшими точками траектории  .
.
Радиусом кривизны кривой в точке М называется величина обратная кривизне:  .
.
Получим формулу для вычисления ускорения точки М  .
.
Продифференцируем по времени обе части этого равенства
 (*)
(*)
Вычислим  .
.

направлен параллельно вектору  , то есть в сторону вогнутости траектории и лежит в плоскости, проходящей через точку М и векторы
, то есть в сторону вогнутости траектории и лежит в плоскости, проходящей через точку М и векторы  . Таким образом, лежит в соприкасающейся плоскости, так как при
. Таким образом, лежит в соприкасающейся плоскости, так как при  плоскость
плоскость  МАВ совпадает с соприкасающейся плоскостью. Дифференцируем обе части. тождества:
МАВ совпадает с соприкасающейся плоскостью. Дифференцируем обе части. тождества:  ;
;  , то есть
, то есть  .
.
Следовательно, направлен по главной нормали траектории.
Определим  . МАВ – равнобедренный.
. МАВ – равнобедренный.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 534; Нарушение авторских прав?; Мы поможем в написании вашей работы!