КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Вибрационные гироскопы
|
|
|
|
Гироскопы с вращающейся массой (ротором) давно известны. Их главное свойство – сохранять неизменным положение оси вращения в пространстве – широко используется как для стабилизации положения различных платформ, так и косвенно, для получения исходной информации для реализации такой стабилизации. Присущие им недостатки связаны с необходимостью иметь достаточно большую инертную массу и износом опор. Практически их невозможно сделать миниатюрными.
В 1950г. для замены гироскопов с вращающейся массой был предложен вибрационный. Гироскоп предназначен для измерения угловых ускорений. Он сложнее обычных линейных акселерометры, т.к. принципиально требует для работы опорного движения. В обычном гироскопе таким опорным движением является вращение ротора. В вибрационном гироскопе вращение заменено возбуждением опорной вибрации.
Принцип работы чувствительного элемента (ЧЭ) вибрационного гироскопа иллюстрирует рис. 36.
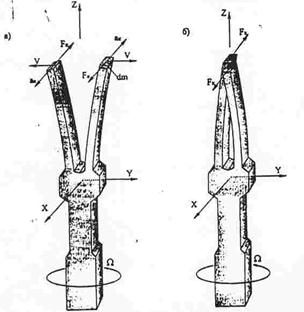
Рис. 36. Принцип работы чувствительного элемента вибрационного гироскопа:
а – возбуждаемые колебания; б – вынужденные колебания.
ЧЭ представляет собой миниатюрный камертон, выполненный из монокристалла. Обе его пластины - ветви приводятся в противофазное колебательное движение в плоскости ZY (плоскость листа). Это возбуждение производится внутренним генератором. Каждый элемент ветви массой dm перемещается с линейной скоростью V. Если теперь основание, на котором закреплен камерон, будет вращаться со скоростью Ω (которую нужно измерить) вокруг оси Z, для каждого элемента массы возникает ускорение Кориолиса ak=2VΩ и соответствующая сила инерции Fk=2VΩdm.
Силы Кориолиса суммируются по каждой из ветвей и приводят к их изгибу в плоскости XZ. При вращении основания в другую сторону изменится и направление изгиба. Таким образом, колебания (отклонения) ветвей в плоскости XZ содержат информацию об угловой скорости вращения основания.
Линейные ускорения, вибрации корпуса прибора являются помехой для полезного сигнала. Теория работы и извлечения полезной информации с таких датчиков достаточно сложна.
Такие простые конструкции ЧЭ выполнялись из кварца, обладающего пьезоэффектом. Датчики имели габариты 63×47×35, а измеряли скорость вращения до 75о /С.
Обычно гироскопы имеют более сложную конструкцию.
На рис. 37 представлена структура вибрационного гироскопа, выполненного по планарной технологии на кремниевой пластине.
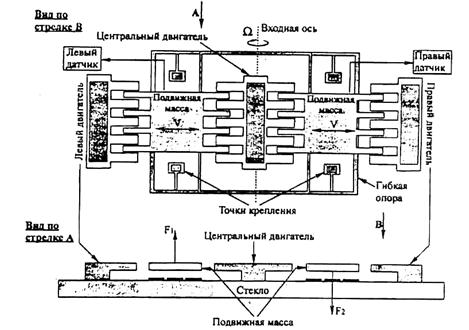
Рис. 37. Конструктивная схема вибрационного гироскопа
Гироскоп имеет две подвижные массы, каждая площадью 4мм2, подвешенные на гибких опорах (рамках) относительно базового элемента (основания), выполненного из стекла. Массы с помощью трех (левый, центральный, правый) электростатических двигателей гребенчатой структуры приводятся в вибрационное движение со скоростью V параллельно плоскости базы. Векторы скоростей находятся в противофазе друг к другу. Если возникает угловая скорость Ω вокруг входной оси, появляется сила Кориолиса F1 и F2, под их действием одна масса будет подниматься, другая опускаться по отношению к плоскости вибрации.
Емкости датчика перемещения, расположенные на подвижных массах (снизу) и на основании зафиксирует перемещение и сформирует выходной сигнал гироскопа. Имеются также емкости для формирования контура электростатической обратной связи.
Наиболее распространена конструкция гироскопа с двумя рамками и торсионным подвесом (рис. 38).
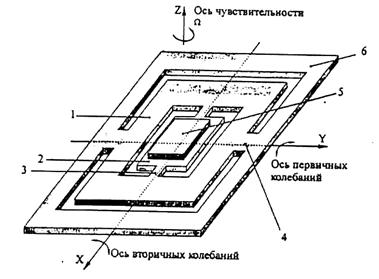
Рис. 38. Структура гироскопа с двумя рамками и торсионным подвесом
Рамки образуют два плоских подвижных элемента – внешний (1) и внутренний (2), соединенных между собой и с основанием с помощью торсионов 3 и 4, оси которых перпендикулярны друг другу. Для увеличения кинетического момента на внутреннем элементе расположена дополнительная масса 5, снизу между основанием и рамками нанесено несколько пар электродов, образующих возбуждающие емкости и емкостные датчики перемещений.
Наружному элементу 1 электрическим возбуждением сообщаются угловые колебания относительно оси Y. Эти колебания в той же плоскости через торсионы 3 передаются и на внутренний элемент. При вращении прибора со скоростью Ω относительно оси Z возникают силы Кориолиса, которые заставляют внутренний элемент поворачиваться относительно оси X. Это отклонение измеряется емкостным датчиком перемещений и несет информацию об угловой скорости Ω.
Такие гироскопы обеспечивают по оценкам, точности порядка (102÷103)о/час и выше.
На рис. 39 приведена конструктивная схема микрогироскопа, имеющего сразу две оси чувствительности.
Чувствительная масса здесь имеет форму кольца (2), имеет сложный симметричный упругий подвес (элементы 3-8). Подвижная часть гироскопа через втулку (1) закрепляется на корпусе прибора (крепление «центральное»). Очевидно, что такой гироскоп сложен и конструктивно и в изготовлении.
Кольцо возбуждается по схеме «вибрационное вращение» с помощью электростатического привода гребенчатой структуры (11). Измеряется вращение относительно оси Z. Измерение перемещений чувствительного элемента осуществляется в двух плоскостях с помощью емкостных датчиков (9) и (10), расположенных на осях X и Y.
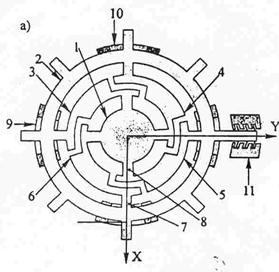
Рис. 39. Двухосевой микрогироскоп:
1 – центральная втулка; 2 – кольцо (инертная масса); 3-8 – элементы упругого подвеса; 9,10 – емкостные датчики перемещения; 11 – привод гребенчатой структуры.
Становится популярной схема очень простого по конструкции стержневого гироскопа (рис. 40).
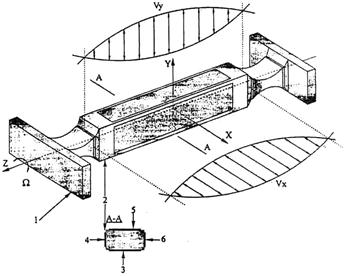
Рис. 40. Структура стержневого вибрационного гироскопа
Правда, его можно выполнить только с использованием пьезоэлектрических материалов.
Он состоит из стержня (2), вытравленного в корпусе (1) и пьезоэлементов (3,4,5,6), нанесенных на грани стержня (стержень может иметь в сечении и треугольное сечение – так делают японцы). С обеих сторон и длине стержень имеет шейки, на которых он и подвешен к корпусу. Пьезоэлементы (3-5) возбуждают в стержне колебания в плоскости YZ, каждый элемент стержня при этом получает скорость Vy. Если теперь вращать стержень вокруг оси Z со скоростью Ω, возникающие силы Кориолиса вызывают колебания стержня в плоскости XZ с линейными скоростями Vx каждого элемента. Для измерения этих колебаний служат пары пьезоэлементов (4-6).
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 7034; Нарушение авторских прав?; Мы поможем в написании вашей работы!