КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
АСР стабілізації концентрації речовин
|
|
|
|
До особливих аспектів регулювання концентрації в багатьох випадках належить розподіленість об'єкта керування і первинного вимірювального перетворювача. Наприклад, датчики газоаналізаторів, аналізатори рідин часто розміщуються на деякій відстані від об'єкта, мають пристрої підготовки газу чи рідини для вимірювання. Це призводить до появи істотного часу чистого запізнення, яке може значно перевищувати сталу часу аналізатора. До таких приладів контролю належать хроматографи, аналізатори фото калориметричні, термомагнітні, оптичні, кондуктометричні та ін. Виняток становлять датчики рН-метрів, які можуть розміщуватися безпосередньо в технологічному апараті, ультразвукові та ін.
Функціональну схему одноконтурної АСР концентрації за наявності запізнення датчика та його структурну схему показано на рис. 3.7. Концентрація регулюється зміною витрат матеріального потоку на вході об'єкта, який несе реагуючий компонент, або зміною витрати теплового потоку, що спричинює зміну температури в апараті.
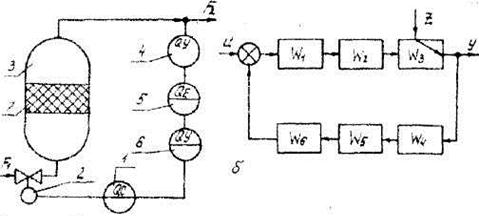 |
Рис. 3.7. Схеми АСР із запізненням у каналі зворотного зв'язку:
а - функціональна; б – структурна
Система регулювання працює так: за допомогою пристрою підготовки проби 4 аналізована суміш втягується, проходить, наприклад, стадії охолодження, очищення, дозування і надходить на датчик 5, в якому концентрація перетворюється на електричний або пневматичний сигнал. Останній надходить на проміжний перетворювач 6, а далі - на регулятор 1 і виконавчий механізм 2.
У динамічному відношенні стадія підготовки аналізованої проби являє собою ланку чистого запізнення з передаточною функцією
W4(s)= exp(-τ4s) /3.16/
де τ4 – час чистого запізнення.
Передаточна функція АСР по каналу регулювання
 /3.17/
/3.17/
де τ3 і τ4 – час чистого запізнення відповідно об’єкта керування та датчика.
Із рівняння /3.17/ випливає, що збільшення часу чистого запізнення в характеристичному рівнянні призводить до погіршення стійкості системи регулювання. Крім того, на роботу регулятора істотно впливає також якість регулювання. Частоти переходу ДЧХ зміщуються ближче до нуля, а це означає, що з’являються додаткові резонансні частоти при достатньо низьких частотах. У таких випадках в перехідному процесі істотно підсилюються друга та третя складові, які звичайно мають низький ступінь загасання і великий час перехідного процесу. Тому часто доцільно використовувати посередні методи контролю за концентрацією, наприклад, температурної депресії, ультразвукові, радіоактивні, гідростатичні, інші методи визначення концентрації за густиною розчину тощо.
Системи регулювання pH-рідин можна поділити на системи позиційного та неперервного регулювання. Позиційне регулювання використовують тоді, коли швидкість зміни pH невелика, а допустимі межі її коливань достатньо широкі. Якщо необхідно точно підтримувати pH розчину на заданому рівні, то використовують неперервні ПІ- або ПІД-регулятори.
Спільною особливість об’єктів при регулювання pH є нелінійність їх статичних характеристик, пов’язана з нелінійною залежністю pH від витрати реагентів (рис. 3.8 а). На кривій pH=f(F) можна відокремити три ділянки: І і ІІІ мають велику не лінійність і достатньо малі коефіцієнти передавання; на ділянці ІІ об’єкт за своєю статичною характеристикою наближається до релейного елемента. Практично це означає, що в розрахунку лінійної АСР коефіцієнт підсилення регулятора дістають настільки малим, що він виходить за межі робочих настроювань промислових регуляторів. При цьому чим меншою є стала часу об’єкта, тим важче забезпечити стійке регулювання, оскільки починають впливати також запізнення в імпульсних лініях.
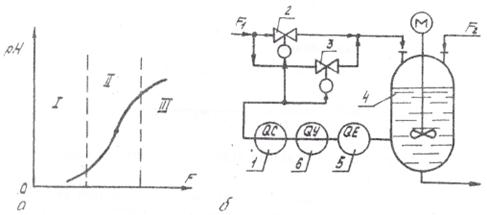
Рис. 3.8 Статична характеристика об’єкта (а) і функціональна схема системи регулювання pH (б)
Щоб забезпечити стійке регулювання pH, використовують спеціальні системи, схему однієї з яких показано на рис. 3.8 б. Клапан 2 великого умовного діаметру, який настроєно на максимальний діапазон зміни вихідного сигналу регулятора 1, використовують для грубого регулювання витрати F1. Клапан 3 (для точного регулювання) розрахований на меншу пропускну здатність і настроєний так, що на ділянці І характеристики pH=f(F) він повністю відкритий, а на ділянці ІІІ – повністю закритий. Таким чином у разі незначного відхилення pH від заданого значення ступінь відкриття клапана 2 практично не змінюється, а регулювання виконують за допомогою клапана 3. Структурну схему такої АСР показано на рис. 3.9.
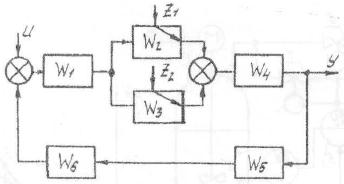
Рис. 3.9 Структурна схема регулювання pH
Передаточна функція такої системи регулювання має вигляд:
 /3.18/
/3.18/
Передаточні функції W2(s) і W3(s) розрізняють як коефіцієнтом передачі, так і сталою часу. Звичайно стала часу виконавчого механізму 3 має бути значно меншою, ніж виконавчого механізму 2, а коефіцієнт передачі K3>K2.
Ділянка ІІ статичної характеристики об’єкта достатньо вузька і в реальних умовах похибка регулювання через лінеаризацію на розглядуваній ділянці може бути досить великою. У цьому разі точніші результати регулювання дає система з трьома регуляторами, увімкненими паралельно (рис. 3.10 а).
Із ри. 3.9 б випливає, що коефіцієнти передачі об’єкта на ділянці pH1…pH2 різні. Найменший коефіцієнт передачі відповідає точці 1, а найбільший – точці 3. У цьому разі регулятор R1 має настроювання, які відповідають об’єкту з коефіцієнтом передачі K1, регулятор R2 – із коефіцієнтом передачі K2, а регулятор R3 – із коефіцієнтом передачі K3.
Структурну схему такої АСР показано на рис. 3.11.
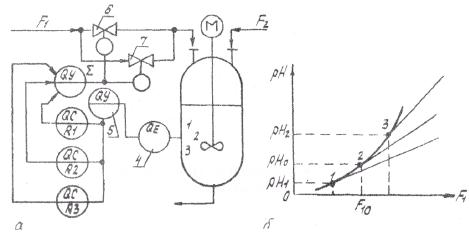
Рис. 3.10 Функціональна схема (а) і нелінійна ділянка статичної характеристики (б)
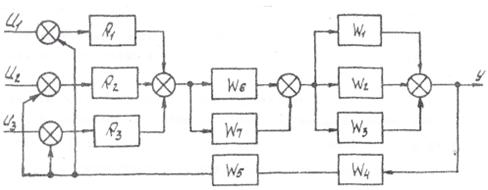
Рис. 3.11 Структурна схема АСР з трьома регуляторами
Таку систему регулювання розраховують окремо для кожного об’єкта і відповідного йому регулятора: R1→W1; R2→W2 і R3→W3.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 692; Нарушение авторских прав?; Мы поможем в написании вашей работы!