КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Умови інваріантності
|
|
|
|
Розглянемо умови інваріантності розімкненої системи (рис.4.2.): Y(t) = 0.
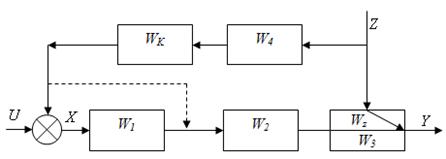
Рис. 4.2. Структурна схема розімкненої АСР
Вважаємо, що u = cоnst, а збурюючий сигнал Z діє на вихідну координату Y двома шляхами – по каналах Z →Y або Z →X→ Y. В операторній формі рівняння для вихідного сигналу має вигляд:
Y(s) = Z(s)[Wz(s)+W1(s)W2(s)W3(s)W4(s)5Wк(s)]=0 /4.1/
За наявності збурення Z(s) ¹ 0 умова інваріантності /4.1/ виконується, якщо:
Wz(s)+ W1(s)W2(s)W3(s)W4(s)Wк(s)=0
З /4.1/ можна знайти передаточну функцію, яку повинен мати компенсатор, щоб виконувалась умова інваріантності:
 /4.2/
/4.2/
Таким чином, щоб забезпечити інваріантність системи регулювання відносно якого-небудь збурення необхідно встановити динамічний компенсатор, передаточна функція якого дорівнює відношенню передаточної функції об’єкта по каналу збурення до передаточної функції еквівалентного об’єкту, взятого з протилежним знаком.
Якщо компенсуючий сигнал надходить на вхід виконавчого механізму, то умова інваріантності набере вигляду
Wz(s)+W2(s)W3(s)W4(s)Wк(s)=0 /4.3/
Одержимо умови інваріантності для комбінованої АСР, якщо компенсуючий сигнал надходить на вхід регулятора (див. рис. 4.1, а). У цьому разі передаточна функція комбінованої системи регулювання по каналу Z →Y набере вигляду:
 /4.4/
/4.4/
Умова інваріантності комбінованої системи полягає в тому, що чисельник передаточної функції має дорівнювати нулю. Таким чином, у разі ввімкнення виходу компенсатора на вхід регулятора передаточна функція компенсатора, одержана з умови інваріантності, залежатиме від характеристик не лише об’єкта, а й регулятора.
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 377; Нарушение авторских прав?; Мы поможем в написании вашей работы!