КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
АСР пов’язаного регулювання
|
|
|
|
Основою побудови системи пов ’ язаного регулювання є принцип автономності. Щодо об’єкта з двома входами і виходами поняття автономності визначає взаємну незалежність вихідних координат y1 і y2 при роботі двох замкнених систем регулювання.
По суті умова автономноcті складається з двох умов інваріантності: першого виходу y1 відносно сигналу другого регулятора Хр2 та другого виходу y2 відносно сигналу першого регулятора Хр1. При цьому сигнал Хр1 можна розглядати як збурення для виходу y2, а сигнал Хр2 – як збурення для y1. Тоді перехресні канали виконують роль каналів збурення (див. рис. 4.10). Для компенсації цих збурень у систему регулювання вводять динамічні пристрої з передаточними функціями  і
і  , сигнали від яких надходять на відповідні канали регулювання або на входи регуляторів.
, сигнали від яких надходять на відповідні канали регулювання або на входи регуляторів.
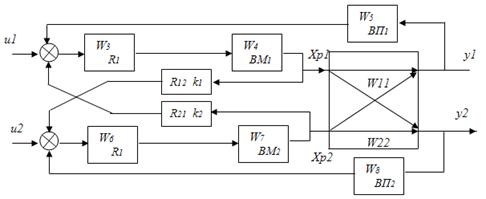
Рис. 4.10. Структурна схема системи пов’язаного регулювання
За аналогією з інваріантними АСР передаточні функції компенсаторів  і
і  , які визначаються з умови автономності, залежатимуть від передаточних функцій прямих і перехресних каналів об’єкта.
, які визначаються з умови автономності, залежатимуть від передаточних функцій прямих і перехресних каналів об’єкта.
 ;
;  /4.27/
/4.27/
Для побудови автономних систем регулювання важливе значення мають фізична реалізованість і технічна реалізація наближеної автономності.
У розрахунку системи пов’язаного регулювання поділяють на автономні АСР (див. рис. 4.11). Кожну таку автономну систему розраховують як комбіновану згідно із принципом інваріантності, тобто знаходять настроювання регулятора і після цього визначають параметри динамічного компенсатора. Збуренням для автономної АСР, зображеної на рис.4.11.а, буде навантаження Хр2 а показаної на рис.4.11.б - Хр1. Таким чином, такі системи досліджують по каналу відповідно Хр2→ y1 і Хр1→ y2.
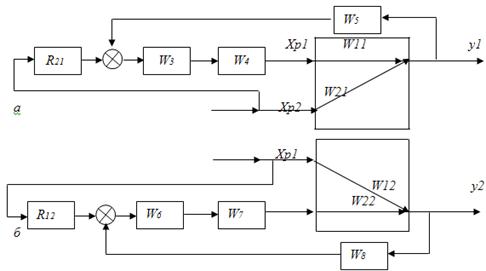
Рис. 4.11. Структурні схеми автономних АСР
Передаточні функції автономних систем регулювання мають такий вигляд: 
 ; /4.28./
; /4.28./
 . /4.29./
. /4.29./
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 692; Нарушение авторских прав?; Мы поможем в написании вашей работы!