КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Вибір закону регулювання регулятора
|
|
|
|
Закон регулювання регулятора вибирають з урахуванням особливостей об'єкта і заданих параметрів якості перехідного процесу. До якості регулювання кожного конкретного технологічного процесу, який має певні особливості, висуваються конкретні вимоги: забезпечення мінімального значення динамічної похибки регулювання або мінімального значення часу регулювання. Тому згідно з вимогами технології як заданий вибирають один із трьох типових перехідних процесів: граничний аперіодичний; із 20%-м перерегулюванням; із мінімальною квадратичною площею відхилення.
Динамічні характеристики конкретного об'єкта і збурення, що надходять на нього, характеризуються своїми величинами або законами їх зміни. Активно впливати на них у процесі експлуатації, як правило, неможливо. З огляду на це для досягнення потрібної якості регулювання при вибраному типовому перехідному процесі необхідно прийняти відповідний закон регулювання і знайти параметри настроювання регулятора. Звичайно цю операцію виконують після визначення динамічних властивостей об'єкта.
Реально закон регулювання регулятора визначається вимогами якості регулювання тогочи іншого технологічного процесу. Якщо допустима межа відхилення технологічного параметра достатньо велика, то можна використовувати пропорційний закон регулювання. При цьому статична похибка не повинна перевищувати допустимої межі зміни регульованого параметра. Якщо допустимі відхилення цього параметра малі, то в закон регулювання необхідно вводити інтегруючу складову, тобто прийняти пропорційно-інтегральний закон регулювання. Щоб зменшити час перехідного процесу, у ПІ-закон регулювання вводять диференціальну складову.
Інтегральні регулятори, як правило, у реальних системах регулювання не використовують. Крім того, їх не можна використовувати для регулювання технологічних параметрів на нейтральних об'єктах, оскільки такі системи нестійкі при всіх значеннях настроювальних параметрів.
П-регулятори мають великі швидкість та коефіцієнт підсилення і можуть працювати на інерційних об'єктах. Але, як зазначалося, їх можна використовувати лише тоді, коли в разі зміни навантаження об'єкта припустимим є відхилення вихідної координати від заданого значення.
ПІ-регулятори мають достатню швидкодію, крім того, здатні виводити параметр на задане значення за рахунок інтегруючої складової, тому вони найбільше поширені в системах регулювання.
ПІД-регулятори використовують тоді, коли об'єкти характеризуються великим запізненням і мають великі зміни у навантаженні. Якщо жодний із розглянутих законів регулювання не дає змоги одержати перехідний процес регулюючої величини, який не виходив би за межі заданих показників якості, то для регулювання вихідної координати замість одноконтурної необхідно використовувати ту чи іншу багатоконтурну систему регулювання.
Рекомендується вибирати орієнтовно закон регулювання за величиною відношення часу запізнення τ до сталої часу Т0 об'єкта –
τ /Т0:
- позиційний регулятор τ /Т0< 0,2;
- неперервний закон регулювання 0,2 < τ /Т0 < 1;
- імпульсне або багатоконтурне регулювання τ /Т0 > 1.
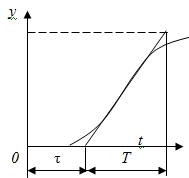 Параметри τ і Т0 можна визначити як за кривою розгону, так і за математичним описом об’єкта. Крива розгону є експериментальною і найточніше характеризує регулювання по досліджуваному каналу. При математичному способі визначення відношення τ /Т0 необхідно одержати математичну модель об’єкта регулювання, розрахувати час запізнення і знайти передаточну функцію еквівалентного об’єкта.
Параметри τ і Т0 можна визначити як за кривою розгону, так і за математичним описом об’єкта. Крива розгону є експериментальною і найточніше характеризує регулювання по досліджуваному каналу. При математичному способі визначення відношення τ /Т0 необхідно одержати математичну модель об’єкта регулювання, розрахувати час запізнення і знайти передаточну функцію еквівалентного об’єкта.
Рис. 5.2. Крива розгону об’єкта
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 707; Нарушение авторских прав?; Мы поможем в написании вашей работы!