КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Економічна ефективність частотно-регульованого електропривода
|
|
|
|
Одним із ефективних напрямів енергозбереження є регулювання технологічних параметрів за допомогою електропривода. До таких параметрів відноситься тиск у водопровідних мережах і в системах вентиляції, швидкість переміщення матеріалів транспортерами тощо. Робота таких систем характеризується нерівномірністю спо-живання води, теплової енергії, повітря на протязі доби в залежнос-ті від природних умов та пори року. За таких умов електропривод повинен забезпечити таке регулювання, яке забезпечувало би міні-мальне електроспоживання або підвищувало би економічність тех-нологічного процесу. Розглянемо способи реалізації деяких таких технологій.
Електроприводи відцентрових помп. Зазвичай, помпи мають нерегульований електропривод. Регулювання подачі здійснюють за-сувкою на напірному трубопроводі. Можна регулювати витрату і зміною кутової швидкості помпи.
Для порівняння цих способів регулювання на рис.12.3 наведено у відносних одиницях: 1 – характеристика помпи при номінальній швидкості  , яка побудована за рівнянням
, яка побудована за рівнянням
 , (12.18)
, (12.18)
де  – напір помпи при витраті
– напір помпи при витраті  і
і  ; С – конструк-тивний коефіцієнт помпи; 2 – характеристика магістралі, яка побу-дована за рівнянням
; С – конструк-тивний коефіцієнт помпи; 2 – характеристика магістралі, яка побу-дована за рівнянням
 , (12.19)
, (12.19)
де  – статичний напір при закритій засувці;
– статичний напір при закритій засувці;  – коефіцієнт опо-ру магістралі. Точка перетину цих характеристик визначає робочу точку помпи. Точка А на рис.12.3 відповідає номінальному режиму роботи.
– коефіцієнт опо-ру магістралі. Точка перетину цих характеристик визначає робочу точку помпи. Точка А на рис.12.3 відповідає номінальному режиму роботи.
У номінальному режимі помпа споживає потужність, яка згідно (6.4) пропорційна площі прямокутника ADOE. Щоби зменшити витрату, наприклад, до 0,6 , задвижку прикривають, що при-зводить до збільшення коефіцієнта опору магістралі R і згідно (12.19) зміниться характеристика магістралі. Робочою точкою стане точка B і споживана помпою потужність буде пропорційна площі прямокутника BKOF, яка майже не відрізняється від площі прямо
, задвижку прикривають, що при-зводить до збільшення коефіцієнта опору магістралі R і згідно (12.19) зміниться характеристика магістралі. Робочою точкою стане точка B і споживана помпою потужність буде пропорційна площі прямокутника BKOF, яка майже не відрізняється від площі прямо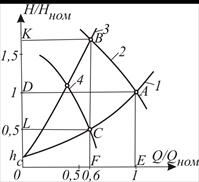 кутника ADOE.
кутника ADOE.
Таку ж витрату можна забезпе-чити зміною швидкості обертання помпи (крива 4 на рис.12.3) і робочою точкою стане точка C, бо характеристика магістралі не змі-ниться. При цьому помпа споживатиме потужність пропорційну площі прямокутника CLOF, яка майже у два рази менша площі прямокутника BKOF.
 З рис.12.3 видно, що зі збільше-нням статичного напору
З рис.12.3 видно, що зі збільше-нням статичного напору  ефек-тивність частотного керування зменшується. В [9] наведені формули для визначення активної потужності, яку споживає асинхронний двигун при дросельному і частотному регулюванні витрати помпи.
ефек-тивність частотного керування зменшується. В [9] наведені формули для визначення активної потужності, яку споживає асинхронний двигун при дросельному і частотному регулюванні витрати помпи.
Електропривод відцентрових вентиляторів. За використанням в промисловості вентилятори займають друге місце після помп. Во-ни працюють на мережу без протиску, внаслідок чого момент стати-чного опору на валу двигуна пропорційний квадрату швидкості (формула 1.11), а споживана потужність без врахування втрат на тертя у підшипниках пропорційна – кубу швидкості  .
.
Регулювати витрату вентиляторів можна:
Ø поворотом лопаток направляючого апарата;
Ø шибером (дроселюванням) на напірній магістралі;
Ø швидкістю обертання.
При змінні кута повороту лопаток змінюється переріз вхідного каналу і відповідно змінюється характеристика вентилятора, при цьому ККД вентилятора суттєво знижується. Системи автоматично-го регулювання витрати зміною положення лопаток використо-вують дуже рідко із-за складності конструкцій і низької надійності.
Регулювання витрати вентилятора дроселюванням аналогічне ре-гулюванню витрати дроселюванням помпи. Залежності споживаної потужності від витрати при дроселюванні і змінні швидкості будуть такими же, як і для помпи (рис.12.3). Отже, споживана потужність при частотному регулюванні асинхронного двигуна вентилятора значно нижча, ніж при регулюванні шибером при всіх значеннях витрати, менших від номінальної.
Електроприводи транспортерів. Рух стрічці транспортера пе-редається, зазвичай, від АД через редуктор і приводний барабан. Потужність, яку споживає двигун,
 , (12.20)
, (12.20)
де  і
і  – відповідно зусилля, необхідні для переміщення ванта-жу і стрічки;
– відповідно зусилля, необхідні для переміщення ванта-жу і стрічки;  – швидкість стрічки,
– швидкість стрічки,  – продуктивність транспортера,
– продуктивність транспортера,  і
і  – ККД двигуна і передачі.
– ККД двигуна і передачі.
З (12.20) слідує, що при зниженні продуктивності ефективність роботи транспортера зменшується, бо збільшується доля потужно-сті, яка витрачається на переміщення стрічки. Тому, доцільно при зміні  змінювати швидкість стрічки так, щоби зусилля було сталим. При такому регулюванні при зменшенні одночасно буде зменшуватися і потужність, яка витрачається на переміщення стріч-ки.
змінювати швидкість стрічки так, щоби зусилля було сталим. При такому регулюванні при зменшенні одночасно буде зменшуватися і потужність, яка витрачається на переміщення стріч-ки.
Наявний досвід показує, що за плавного регулювання лінійної швидкості стрічки за допомогою частотно-регульованого електро-приводу електроспоживання знижується на 20…38% у порівнянні з нерегульованим електроприводом.
Особливістю частотно-регульованого електропривода помп, вен-тиляторів, транспортерів та інших механізмів з тривалим режимом роботи є необхідність використання АД з незалежною вентиляцією, щоби при понижених швидкостях не змінювались умови охолодже-ння,а відтак і момент двигуна.
Електропривод ліфтів. В даний час в якості електропривода па-сажирських та вантажних ліфтів використовують двошвидкісні АД, в основному, зі швидкостями 1000/250об/хв. для забезпечення точ-ної зупинки. Щоби дещо зменшити динамічні навантаження на еле-менти ліфта як при пуску, так і при переході на понижену швид-кість перед зупинкою, на ведучому валу розташовують маховик, що збільшує момент інерції привода.
Заміна, наприклад, двошвидкісного двигуна потужністю 3 кВт частотно-регульованим потужністю 2,2 кВт і номінальною швидкіс-тю 1000об/хв. дає зменшення моменту інерції з  до
до  за рахунок зменшення моменту інерції двигуна з
за рахунок зменшення моменту інерції двигуна з  до
до  і відмови від маховика. Це дає зменшення енергоспоживання на 0,757 кВт на годину за рахунок збільшення циклового ККД з 0,46 до 0,79.
і відмови від маховика. Це дає зменшення енергоспоживання на 0,757 кВт на годину за рахунок збільшення циклового ККД з 0,46 до 0,79.
Використання частотно-регульованого АД, крім того, дозволяє підвищити показники комфортності (рівномірне прискорення і галь-мування) за рахунок керування перехідними процесами. Це також зменшує динамічні навантаження на елементи ліфта, що продовжує їх строк служби.
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 773; Нарушение авторских прав?; Мы поможем в написании вашей работы!