КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Методи та засоби вимірювання електричних та неелектричних величин 5 страница
|
|
|
|
За фізичними закономірностями, покладеними в основу принципу дії, ВП можуть бути поділені на такі групи:
7. Механічні пружні перетворювачі. В основу принципу дії таких
перетворювачів покладені залежності між вхідними механічними зусиллями і викликаними ними переміщеннями чи механічними напруженнями в матеріалі чутливого елемента, що визначаються його пружними властивостями.
8. Резистивні перетворювачі (механічних величин). Носієм вимірювальної
інформації у резистивних перетворювачах механічних величин є електричний опір, зміна якого може бути наслідком переміщення повзунка реостата чи реохорда в реостатних та реохордних перетворювачах або ж внаслідок тензоефекту в тензорезистивних перетворювачах. Резистивні перетворювачі теплових величин (терморезистивні перетворювачі) та резистивні перетворювачі хемічних величин (електрохемічні резистивні перетворювачі) зараховують відповідно до теплових та електрохемічних, оскільки їх принцип дії вигідно розглядати саме з погляду теплових чи електрохемічних явищ.
9. Ємнісні перетворювачі. В основу принципу дії ємнісних перетворювачів
покладена залежність ємності конденсатора від відстані між його електродами, площі їх перекриття чи діелектричної проникності середовища між електродами, коли відстань, площа перекриття (кут повороту) чи діелектрична проникність є мірою вимірюваної величини.
10. П'єзоелектричні перетворювачі. До п'єзоелектричних належать перетво
рювачі, принцип дії яких оснований на використанні явища поляризації п'єзоелектрику внаслідок дії на нього механічних зусиль. Різновидом п'єзоелектричних є п'єзорезонансні перетворювачі, принцип дії яких оснований на використанні залежності резонансної частоти п'єзоелемента від значення вимірюваної величини, наприклад, температури довкілля.
11. Індуктивні перетворювачі. Це перетворювачі, в яких використовується за
лежність повного електричного опору намагнічувальної обмотки від значення комплексного магнітного опору магнітного кола перетворювача, який може бути результатом зміни повітряного проміжку в магнітному колі перетворювача або результатом зміни магнітних властивостей феромагнетику внаслідок дії на нього механічних зусиль, як в індуктивних магнітопружних перетворювачах.
12. Взаємоіндуктивні {трансформаторні) перетворювачі. Принцип їх дії осно
ваний на використанні залежності магнітного потоку і відповідно наведеної у вторинній обмотці ЕРС (при незмінних намагнічувальних ампервитках)
від значення комплексного магнітного опору магнітопроводу, який, як і в індуктивних перетворювачах, може змінюватись зі зміною повітряного проміжку чи магнітних властивостей феромагнетику, спричинених його механічною деформацією.
10. Індукційні перетворювачі. їх принцип дії оснований на використанні явища
електромагнітної індукції. Вхідними (вимірюваними) величинами таких перетворювачів можуть бути швидкість зміни магнітного потоку або швидкість лінійного чи кутового переміщення вимірювальної котушки.
11. Гальваномагнітні перетворювачі. їх принцип дії базується на використанні
гальваномагнітних ефектів Гаусса або Холла. Суть ефекту Гаусса полягає у зміні електричного опору провідника чи напівпровідника при проходженні через нього електричного струму та одночасної дії на нього магнітного поля, а ефекту Холла - в появі за названих умов поперечної різниці потенціалів (ЕРС Холла). Основними різновидами гальваномагнітних перетворювачів є відповідно магніторезистивні перетворювачі та перетворювачі Холла.
12. Теплові перетворювачі. Тепловими називають перетворювачі, в основу
принципу роботи яких покладені фізичні ефекти, що визначаються тепловими процесами. Теплові перетворювачі - це, переважно, перетворювачі температури. Правда, непрямо вони можуть використовуватись для перетворень інших величин, що проявляються через теплові процеси, наприклад, хемічного складу, концентрацій, швидкості руху газів чи рідин тощо. Є дві основні групи теплових перетворювачів, які широко застосовуються у вимірювальній техніці. Це - терморезистивні, що використовують залежність опору матеріалу від температури та термоелектричні, в основу принципу дії яких покладена залежність термо-ЕРС термопари від різниці температур (якщо відома температура вільних кінців термопари - від перетворюваної температури, якою є температура гарячого спаю термопари).
10. Електрохімічні перетворювачі. Принцип дії електрохемічних перетворю
вачів оснований на залежності електропровідності електролітичної комірки від складу, концентрації, температури чи інших параметрів досліджуваного розчину (електрохемічні резистивні перетворювачі); залежності електродних потенціалів від активності водневих іонів (гальванічні перетворювачі рН-мет-рів); а також залежності різниці електричних потенціалів на межі розділу
твердої та рідкої фаз від швидкості переміщення розчину (електрокінетичні перетворювачі).
13. Оптичні перетворювачі. В основу принципу дії оптичних перетворювачів
покладена залежність параметрів оптичного (світлового чи теплового) випромінювання від значення вимірюваної (перетворюваної) величини. Остання може діяти безпосередньо на джерело випромінювання, змінюючи інтенсивність його випромінювання, як в оптичних пірометрах, або ж на оптичний канал, впливаючи на параметри оптичного потоку, як, наприклад, у вимірювача оптичної щільності.
14. Перетворювачі іонізаційного випромінювання. Принцип дії таких
перетворювачів оснований на перетворенні інтенсивності іонізаційного чи рентгенівського випромінювання. У перетворювачах іонізаційного випромінювання вихідна електрична величина функціонально зв'язана з інтенсивністю іонізаційного чи рентгенівського випромінювання, яка є мірою досліджуваної величини.
Вимірювання геометричних розмірів
У класифікації фізичних величин за їх фізичними властивостями (прийнятій,зокрема, в Міжнародній системі одиниць) одну із груп величин становлять величини простору та часу, до якої належать геометричні розміри час та параметри руху. Геометричні розміри - це широка група понять лінійних та кутових розмірів, площі та об'єму. Своєю чергою, до лінійних розмірів належить довжина, товщина (грубизна) покрить, відстань між об'єктами, рівень, шорсткуватість (нерівність) поверхні тощо. Головними кутовими розмірами є плоский та тілесний кути. Час є однією із семи основних одиниць SI. Час, як і простір, - це одна із форм існування матерії. Вони нерозривно пов'язані між собою, характеризуючи, зокрема, параметри руху матерії, тобто динаміку матерії в просторі та в часі. Лінійні та кутові переміщення, швидкості та прискорення характеризують просторово-часовий стан об'єктів (матерії) одного щодо іншого, прийнятого за нерухомий. Одним із різновидів параметрів руху є витрати рідких чи газоподібних речовин.
Вимірювання лінійних та кутових розмірів
Вимірювання лінійних та кутових розмірів займають значне місце в різних галузях науки та техніки, зокрема, в машино - та приладобудуванні, де вимірювання цих величин займають до 80 % від всіх вимірювань в цих галузях. Завдання вимірювань лінійних та кутових розмірів можна розділити на такі групи:
- вимірювання лінійних розмірів в діапазоні від часток мкм до декількох десятків метрів та кутових розмірів, від 0,1" до 360°. Найпоширенішими в цій групі є вимірювання розмірів деталей, відхилення розміру деталі від заданого значення, вимірювання параметрів шорсткуватості поверхні, товщини покрить;
- вимірювання розмірів від часток метра до сотень метрів при визначенні рівня рідких та сипучих речовин у різних резервуарах та свердловинах, рівня пального в баках різних транспортних засобів;
- визначення координат об’єктів та відстаней між об’єктами, зокрема і космічними, що знаходяться в межах від одиниць міліметра до мільйонів кілометрів.
Останнім часом під впливом інтенсивного розвитку інтегральних схем, мікропроцесорних пристроїв відбулось корінне оновлення та значне урізноманітнення техніки, що застосовується при вимірюваннях лінійних та кутових розмірів. Сьогодні, завдяки прогресу в конструюванні приладів, можуть бути реалізовані такі методи вимірювань, які ще декілька років тому здавалися неймовірними. Нові апаратні рішення приводять до появи нових різновидностей методів вимірювань. Донедавна для вимірювань геометричних розмірів застосовували здебільшого прилади, що працюють за аналоговим принципом. Сьогодні у зв'язку зі значним прогресом в галузі первинних вимірювальних перетворювачів та винятковими можливостями цифрової вимірювальної техніки на перший план виходять цифрові засоби вимірювань цих величин. їх основні переваги: можливість автоматизації вимірювального процесу та автоматичної обробки результатів вимірювань, неперервний запис результатів вимірювань тощо. Тому, розглядаючи засоби та методи вимірювань геометричних розмірів, зупинимось тільки на електричних засобах, зокрема з цифровим виходом, не забуваючи про те, що основною ланкою засобів вимірювань геометричних розмірів є первинний вимірювальний перетворювач.
Основні електричні методи та відповідні засоби вимірювань лінійних та кутових розмірів залежно від наявності чи відсутності механічного контакту між досліджуваним об'єктом та засобом вимірювань поділяють на контактні та безконтактні, а залежно від принципу вимірювального перетворення методи поділяють на електромеханічні, електрофізичні та спектрометричні (хвильові).
Електромеханічні методи залежно від виду первинного перетворювача поділяють на резистивні, індуктивні, ємнісні, оптоелектронні, обкочування тощо.
Електрофізичні методи вимірювань основані на використанні відмінності в фізичних властивостях речовин, що знаходяться на різних сторонах межах вимірюваного розміру. Для вимірювань лінійних та кутових розмірів використовують методи та прилади, основані на відмінностях електричних, магнітних, теплових та інших властивостей. Відповідно електрофізичні методи поділяються на електромагнітні, ємнісні, кондуктометричні тощо. Найпоширенішими з електромагнітних є вихрострумові та резонансні методи.
Спектрометричні методи та відповідні засоби вимірювань залежно від довжини хвилі випромінювання, що використовується при вимірюванні, поділяють на звукові, ультразвукові, радіохвильові, надвисокочастотні, оптичні (лазерні). Залежно від фізичних явищ, які використовуються при вимірюванні, спектрометричні методи класифікують на локаційні, Інтерферометричні, рефрактометричні тощо.
Електромеханічні методи широко застосовуються для вимірювань розмірів деталей та шорсткуватості поверхні (контактні штангенциркулі, мікрометри, профілометри), ця вимірювань рівня (поплавкові та буйкові рівнеміри). Для вимірювань відстаней, пройдених транспортними засобами, широко використовують спосіб обкочування.
Індуктивні мікрометри-профілеметри, в яких вимірювальний щуп у своїй верхній частині має закріплений феритовий стержень, який при переміщенні штока змінює індуктивність вимірювальної котушки. Котушка, індуктивність Lx якої є функцією вимірюваного переміщення х, становить частотно-залежний елемент LC-генератора. Якщо частота опорного генератора
а частота вимірювального генератора
Мікрометри - профілометри з індуктивним первинним перетворювачем дають змогу вимірювати мікронерівності від ОД мкм, а верхня границя вимірювань становить звичайно декілька мм.
Здебільшого в приладо - та машинобудуванні необхідно вимірювати не все значення розміру, яке може досягати десятків см і більше, а лише його відхилення від деякого заданого значення, оскільки під час виготовлення деталі контролюється її розмір. Ці відхилення звичайно не перевищують часток мм, а отже, названі мікрометри можуть бути застосовані для цих потреб.
Для вимірювань розмірів у діапазоні часток міліметра до декількох сантиметрів застосовують штангенциркуль (рис. 1,а) з довгоходовим щупом 1 та ємнісним перетворювачем переміщень. Останній складається з циліндричних зовнішнього 2 та внутрішнього 3 електродів і екрана 4 з електропровідного матеріалу, з'єднаного механічно з вимірювальним щупом. При переміщенні екрана ємність вимірювального конденсатора буде змінюватись пропорційно вимірюваному переміщенню. Для виключення впливу довкілля на результат вимірювань передбачений компенсуючий конденсатор, ємність Ск якого дорівнює ємності вимірювального конденсатора при х = 0. Приклади електричних вимірювальних кіл такого штангенциркуля наведені на рис. 1,б, в.
Електрофізичні метода застосовують покрить та тонких листових виробів.

Рис. 1. Ємнісний штангельциркуль та приклади його вимірювальних кіл
Вимірювання товщини шару покриття
Залежно від характеру покриття, фізичних властивостей матеріалу деталі та її покриття, необхідної точності, умов роботи тощо використовують найрізноманітніші методи вимірювань. Всі ці методи можуть бути розділені на дві великі групи: з руйнуванням покриття та без його руйнування. Найбільшу групу серед методів так званого неруйнівного контролю становлять електрофізичні методи, а також методи, основані на використанні відмінностей у фізичних властивостях деталі та п покриття. Серед них: вихрострумові, індуктивні, магнітометричні, радіаційні, індукційні, ємнісні методи.
Вимірювання товщини шару покриття вихрострумовим способом може бути застосоване для вимірювань товщини нанесених на неферомагнітні (кольорові) метали ізоляційних покрить. За способом перетворення товщини у вихідний сигнал розрізняють генераторні (взаємоіндуктивні) та параметричні (індуктивні) вихрострумові перетворювачі. В індуктивних вихрострумових перетворювачах змінне електромагнітне поле, створюване вимірювальною котушкою, Вх наводить у поверхневому шарі деталі із електропровідного матеріалу вихрові струми. Поле вихрових струмів, взаємодіючи з полем котушки, приводить до зміни її індуктивності L (та відповідно повного електричного опору), які є мірою вимірюваної товщини. Цей спосіб при його надзвичайній простоті є недосконалим і не застосовується.
У реальних засобах вимірювань товщини вихрострумовим методом використовують звичайно частотний спосіб отримання вимірювальної інформації. Вимірювальна котушка вмикається в LC-контур генератора високої частоти. Залежно від товщини покриття, а також від інтенсивності взаємодії поля вихрових струмів з вимірювальною котушкою більшою або меншою мірою змінюється індуктивність вимірювальної котушки і тим самим вихідна частота fx вимірювального автогенератора, значення якої наближено може бути розраховано як

де C0 - ємність резонансного контуру; L0 та R0 - відповідно індуктивність та активний опір вихрострумового перетворювача за відсутності досліджуваного об'єкта; Lвн та Rвн - внесені індуктивність та активний опір, зумовлені впливом вихрових струмів у досліджуваному об'єкті.
Найдосконалішою є двогенераторна схема (з вимірювальним та опорним генераторами) з формуванням вихідного сигналу у вигляді різниці частот. За такою структурою побудований вихрострумовий вимірювач товщини покрить типу "Радон", призначений для вимірювань товщини діелектричних покрить, нанесених на струмопровідну основу плоскої, випуклої та увігнутої форм і товщини виробів із діелектрику, які під час їх дослідження ставлять на струмопровідну основу. Прилад має діапазон вимірювань 0...10 мм та граничну похибку, яка не перевищує 1 %.
Для вимірювань товщини покрить на феромагнітних деталях можна застосовувати індуктивний метод. Первинним перетворювачем такого засобу буде індуктивний перетворювач, схема якого приведена на рис.2.

Рис. 2. Схема індуктивного товщиноміра
Враховуючи, що магнітний опір магнітопроводу значно менший від
магнітного опору покриття, еквівалентна Індуктивність може бути записана як
де w - кількість витків вимірювальної обмотки; SM - площа перерізу магнітопроводу; δ-товщина шару покриття.
Вимірювальні кола індуктивних вимірювачів товщини покрить можуть бути найрізноманітнішими. Здебільшого застосовують мостові методи вимірювань з використанням робочого індуктивного перетворювача, що розміщений на деталі з покриттям, та ідентичного робочому компенсаційного перетворювача, розміщеного на аналогічній деталі без покриття. Використання компенсаційного перетворювача, увімкненого у сусіднє плече моста, дає змогу усунути вплив зовнішніх чинників, зокрема температури, на результат вимірювань.
Рис. 3. Мостова схема індуктивного товщиноміра
У мостовій схемі (рис. 3) індикатором вимірюваної величини є магнітоелектричний мілівольтметр, увімкнений до виходу фазочутливої кільцевої схеми випрямлення. Резистор Rp змінногоопорупризначений для встановлення нульового показу мілівольтметра при нульовому чи заданому значенні вимірюваної товщини.
Похибка вимірювання товщини покриття з використанням індуктивних них перетворювачів лежить у межах 10 %.
Із неруйнівних методів зупинимось ще на методі, основаному на використанні взаємоіндуктивних перетворювачів, вихідним інформативним параметром яких є ЕРС, наведена у вимірювальній обмотці (рис. 4).
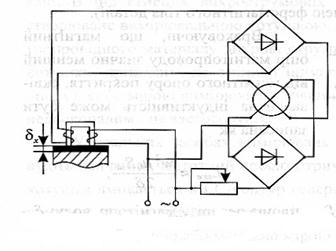
Рис. 4. Вимірювач товщини гальванічного покриття

де ZМ = RМ+ + jXM
+ jXM  -комплексний магнітний опір магнітопроводу (тут ХМ та RМ — реактивна та активна складові комплексного магнітного опору магнітопроводу, що значно менші від магнітного опору покриття
-комплексний магнітний опір магнітопроводу (тут ХМ та RМ — реактивна та активна складові комплексного магнітного опору магнітопроводу, що значно менші від магнітного опору покриття
На базі такого методу побудовані прилади для вимірювань товщини покриття в межах до 3 мм з похибкою 10... 15 %.
Серед методів руйнівного контролю найпоширенішим є хімічний метод, - оснований на усуненні покриття за допомогою спеціальних хімічних реактивів. За цим методом мірою товщини покриття може бути час усунення покриття або його маса чи різниця між масою покритої деталі та масою деталі після усунення покриття.
Вимірювання відстаней між об'єктами
Найточнішими методами вимірювань відстаней між об'єктами є спектрометричні методи, зокрема локаційний метод, оснований на вимірюванні часу проходження вимірюваної відстані променем, швидкість якого відома і залишається незмінною під час вимірювання. Практично для реалізації локаційного методу можна використати всі види випромінювань, але найпоширенішими є методи та засоби радіолокації, оптичної та акустичної локації. Локаційний метод, що базується на використанні звукових та ультразвукових хвиль, називають ехо-звуковим.У локаційних засобах джерело випромінювання та приймач знаходяться на одній границі вимірюваного розміру, а на іншій границі - спеціальний відбивач або замість останнього використовується границя об'єкта, відстань до якого визначається.Радіолокаційний та оптичний локаційний методи застосовуються для вимірювань великих відстаней - від десятків та сотень метрів до багатьох мільйонів кілометрів.Акустична локація використовується в твердих, рідких та газоподібних,середовищах для вимірювань розмірів та відстаней від одиниць міліметрів до декількох кілометрів, тобто в діапазоні, в якому застосування радіо- та оптичної локації ускладнено через необхідність вимірювати дуже малі часові інтервали(10-9…10-11с), що зумовлено великою швидкістю розповсюдження електромагнітних хвиль, або внаслідок швидкого загасання електромагнітних коливань у рідких та твердих середовищах.Швидкість розповсюдження звукових та ультразвукових коливань в повітрі дорівнює близько 333 м/с, в морській воді 1500 м/с, а в металах 3000... 10 000 м/с, тобто на 4...6 порядків менше від швидкості розповсюдження електромагнітних коливань, що дає змогу використовувати акустичну локацію для вимірювань малих відстаней.Є два основні способи реалізації локаційного методу: імпульсний та модуляційний (фазовий). В першому способі використовується випромінювання у вигляді коротких імпульсів, а в другому - безперервне модульоване випромінювання, фаза якого містить інформацію про вимірювану відстань. В імпульсних локаторах випромінювання у вигляді короткого імпульсу від джерела випромінювання - лазера спрямовується до об'єкта, відстань до якого вимірюють. Відбитий від об'єкта імпульс приймається оптоелектроішим чутливим елементом. Інтервал часу t, протягом якого імпульс проходить подвійну вимірювану відстань, визначається вимірювачем інтервалів часу. Якщо відома швидкість  розповсюдження променя v, вимірювана відстань lх обчислюється за допомогою обчислювального пристрою відповідно до формули lx= (v/2)·t i безпосередньо відраховується відліковим пристроєм. видкість розповсюдження електромагнітного випромінювання, зокрема оптичного, в повітряному середовищі визначається за формулою υ=с/n, де с=299 792 458 м/с - швидкість світла у вакуумі; n - показник заломлення світла в середовищі, який залежить від його температури, тиску та вологості.У сучасних високочастотних світловіддалемірах одночасно з вимірюванням відстаней здійснюються допоміжні вимірювання метеорологічних параметрів середовища (температури Т, тиску Р та вологості W) в декількох точках вздовж вимірюваної відстані, результати яких вводяться в мікропроцесор для уточнення значення швидкості світла в даному середовищі в момент вимірювання відстані. Цей спосіб надзвичайно трудомісткий і використовується лише при дуже точних метрологічних вимірюваннях відстаней до декількох кілометрів, наприклад, в установках для відтворення одиниці довжини наділянці 50...1000м.
розповсюдження променя v, вимірювана відстань lх обчислюється за допомогою обчислювального пристрою відповідно до формули lx= (v/2)·t i безпосередньо відраховується відліковим пристроєм. видкість розповсюдження електромагнітного випромінювання, зокрема оптичного, в повітряному середовищі визначається за формулою υ=с/n, де с=299 792 458 м/с - швидкість світла у вакуумі; n - показник заломлення світла в середовищі, який залежить від його температури, тиску та вологості.У сучасних високочастотних світловіддалемірах одночасно з вимірюванням відстаней здійснюються допоміжні вимірювання метеорологічних параметрів середовища (температури Т, тиску Р та вологості W) в декількох точках вздовж вимірюваної відстані, результати яких вводяться в мікропроцесор для уточнення значення швидкості світла в даному середовищі в момент вимірювання відстані. Цей спосіб надзвичайно трудомісткий і використовується лише при дуже точних метрологічних вимірюваннях відстаней до декількох кілометрів, наприклад, в установках для відтворення одиниці довжини наділянці 50...1000м.
Інший спосіб уточнення швидкості світла у цьому середовищі полягає у використанні двохвильового дисперсійного методу, при якому показник заломлення п визначають, вимірюючи відстані при двох різних довжинах хвиль із застосуванням двочастотного лазера. Цей спосіб використовується в світловіддалемірах для точних вимірювань великих відстаней (до сотень км).
У фазових (модуляційних) локаційних віддалемірах використовується неперервне випромінювання лазера, модульоване за інтенсивністю синусоїдним сигналом з частотою fM від генератора. Як інформативний параметр для визначення часу проходження променем подвійної вимірюваної відстані lх приймається кут фазового зсуву між напругою на виході приймача випромінювання та модулювальною напругою, який вимірюється за допомогою фазометра і здійснюється на частоті модуляції:

де ωMt1 та ωMt2 - фази коливань відповідно в моменти часу t1 та t2; N- повна кількість фазових циклів; ∆φ - кут фазового зсуву в границях неповного фазового циклу.
Вимірювана відстань визначається в обчислювальному пристрої за формулою:

Отже, при вимірюваннях фазовими локаційними віддалемірами відстаней, більших від половини довжини хвилі модуляційного сигналу, необхідно визначити повну кількість фазових циклів і кут фазового зсуву в границях неповного (останнього) циклу. Частота модуляції" лежить, звичайно, в межах 10...100 МГц. За допомогою оптичної локації та лазерів відстань від Землі до відбивачів, установлених на Місяці,була визначена з точністю до 2...6 см, тобто з похибкою меншою за 2 ∙ 10-8 %.
Вимірювання механічних напружень
Із механічних величин, які вимірюються найчастіше, основними є механічні зусилля, які поділяються на зосереджені, зокрема спрямовані лінійно (механічні сили) та обертові (крутні моменти), а також розподілені зовнішні зусилля (тиск) та внутрішні розподілені зусилля, що виникають в тілі досліджуваного об'єкта (механічні напруження).
Діапазон вимірюваних механічних зусиль дуже великий. Так, під час наукових досліджень доводиться вимірювати сили, починаючи від 10-5... 10-6 Н(і навіть менші), а під час промислових вимірювань - до 109 Н. Внутрішні напруження в деталях різних конструкцій лежать в межах до 2000 МПа. Оскільки вимірювання внутрішніх напружень необхідне насамперед для дослідження міцнісних властивостей, то вимірювання механічних напружень, менших від 10 МПа, трапляються рідко. Діапазон вимірювань тиску знаходиться в границях від 0 до майже 1010…1011 Па, а поріг чутливості сучасних манометрів досягає 10-2Па. Верхня границя вимірювань крутних моментів сягає 109 Н∙м.
Методи вимірювань різних видів механічних зусиль мають багато спільного. їх можна поділити на чотири групи, що базуються на вимірюванні;
- деформацій досліджуваного об'єкта або деформацій пружного елемента, які виникають під дією вимірюваного зусилля;
- параметрів або властивостей перетворювачів (електричний чи магнітний опір, частота власних коливань, виникнення електричного заряду тощо), що змінюються під дією досліджуваних зусиль.
- безпосередньо властивостей досліджуваного об'єкта чи середовища (наприклад, швидкості розповсюдження звуку, теплопровідності газу, електричної провідності, магнітної проникності тощо), які залежать від зусиль, що діють на них;
- зусиль методом зрівноважувального перетворення, при якому вимірюване зусилля зрівноважується компенсуючим зусиллям.
Перша група методів найширше застосовується для визначення механічних напружень вимірюванням деформації поверхні досліджуваного об'єкта, а також у приладах для вимірювання сил, крутних моментів та тиску, що попередньо перетворюються в деформацію первинного пружного перетворювального елемента.
Друга група методів використовується у засобах вимірювань, основаних на застосуванні п'єзоелектричних та магнітопружних перетворювачів, безпосередньою вхідною величиною яких є досліджуване зусилля. На залежності властивостей чи параметрів досліджуваного об'єкта від зусиль, що діють на них, основані, наприклад, ультразвуковий, магнітопружних, термопружний та інші методи вимірювань механічних напружень. Метод зрівноважувального перетворення використовується для побудови точних засобів вимірювань сил, крутних моментів, тиску.
Найпоширенішим способом визначення механічних напружень є вимірювання деформації поверхні досліджуваного об'єкта. Діапазон вимірюваних деформацій дуже широкий - від часток мікрометра в металах та твердих пластмасах до десятків сантиметрів у зразках еластичних матеріалів з великим видовженням.
Найпростішим та найпоширенішим методом вимірювань деформацій є так званий тензометричний метод, в якому як первинні перетворювачі деформації використовують тензорезистори. Металеві тензорезистори застосовують під час вимірювань відносних деформацій від 0,002 до 1...2 %, напівпровідникові - до 0,1...0,2 %, навісні металеві -до 10 %, а еластичні (гнучкі кавчукові трубки, заповнені електролітом) - до 30...50 %. Тензорезистори практично безінерційні і використовуються для вимірювань, зокрема, змінних деформацій в діапазоні частот до 100 кГц.
Для вимірювання деформацій чи величин, попередньо перетворених у деформацію пружного перетворювального елемента, тензорезистор наклеюють на досліджувану деталь. Для температур до 200°С застосовують бакеліто - фенольні клеї (БФ), бакелітовий лак, а для вищих температур - жаростійкі кремнійорганічні цементи та цементи на основі рідкого скла.
Особливістю приклеюваних тензорезисторів є те, що вони не можуть бути переклеєні з об'єкта на об'єкт. Тому дійсна функція перетворення робочого тензорезистора не може бути визначена, а для її оцінки знаходять функцію перетворення аналогічного, так званого градуювального тензорезистора з цієї партії. А оскільки властивості окремих тензорезисторів із певної їх партії, а також умови їх приклеювання загалом дещо різні, то відзначається деяка неоднозначність дійсної та номінальної функцій перетворення. Досвід свідчить, що похибка від неідентичності функцій перетворення при куратному приклеюванні тензорезисторів з достатньо однорідної парти не перевищує 1,5 %. Вихідним інформативним параметром тензорезисторів є зміна їх опору і тому здебільшого вимірювальними колами тензорезистивних перетворювачів є мостові вимірювальні кола. Тензорезистор може бути увімкненим в одне з плеч моста, в два плеча або мостове коло може бути складене повністю із тензорезисторів.
Оскільки відносна зміна опору тензорезисторів дуже мала ( <1%), то суттєвий вплив на результат вимірювань може мати температура довкілля. Отже, необхідно передбачити температурну компенсацію. Зокрема, якщо використовують мостове коло з одним робочим тензорезистором (рис.5,а), то для температурної компенсації необхідний інший неробочий тензорезистор RTK = RO, аналогічний робочому Rт, який був би в однакових температурних умовах з робочим. Тоді зміна опорів двох ідентичних (робочого та компенсаційного) тензорезисторів, зумовлена зміною температури довкілля при незмінному значенні вимірюваної деформації, не викликає зміни вихідної напруги. Дійсно, якщо, наприклад εR= 0 та R2 = R3 = R
<1%), то суттєвий вплив на результат вимірювань може мати температура довкілля. Отже, необхідно передбачити температурну компенсацію. Зокрема, якщо використовують мостове коло з одним робочим тензорезистором (рис.5,а), то для температурної компенсації необхідний інший неробочий тензорезистор RTK = RO, аналогічний робочому Rт, який був би в однакових температурних умовах з робочим. Тоді зміна опорів двох ідентичних (робочого та компенсаційного) тензорезисторів, зумовлена зміною температури довкілля при незмінному значенні вимірюваної деформації, не викликає зміни вихідної напруги. Дійсно, якщо, наприклад εR= 0 та R2 = R3 = R
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 2500; Нарушение авторских прав?; Мы поможем в написании вашей работы!