КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Закон электромагнитной индукции
|
|
|
|
Технические требования и параметры автоматизированной ЭМС
Обобщенная структурная схема автоматизированной ЭМС
Классификация ЭМС по мощности
- до 600 Вт – микромашины;
- до 5 КВт – машины малой мощности;
- от 5-100 КВт – машины средней мощности;
- от 100 КВт – машины большой мощности;
Классификация по быстроходности:
- до 300-400 об – низкооборотные;
- от 300-400 до 6000 об. – машины со средней скоростью;
- от 6000 об. – сверхбыстроходная;
Существуют ЭМС – 200000 оборотов.
Три вида креплений:
- на лапах;
- флансовые;
- в обоймах.
ЭМС делятся по климатике: -60, +60 оС
Номинальные параметры – параметры ЭМС, на которые рассчитана машина, с точки зрения надежности.
Основные законы электромеханики:
1 все ЭМС обратимы, т. е. Любая ЭМС может работать либо в режиме двигателя, либо в режиме генератора. Режим работы ЭМП зависит от сопротивления на валу.
2 во всех ЭМС КПД<1.
Все ЭМС описываются аналитической диаграммой:
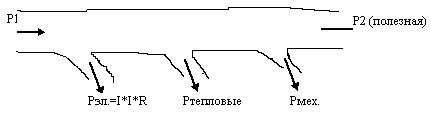
Магнитные потери – потери на вихревые токи и гистерезис
 - коэффициент нагрузки
- коэффициент нагрузки
Рмех и Рмагн. не зависят от нагрузки. При равенстве постоянных и переменных потерь КПД максимальна.
3 во всех ЭМС магнитные поля неподвижны относительно друг друга.
4 магнитный поток ЭМС не зависят от нагрузки
 Т. к. магнитный поток при упругости ЭМС может меняться, то все ЭМС с точки зрения динамики можно считать нелинейными системами. Иногда мы пренебрегаем.
Т. к. магнитный поток при упругости ЭМС может меняться, то все ЭМС с точки зрения динамики можно считать нелинейными системами. Иногда мы пренебрегаем.
 - момент – важнейший параметр ЭМС.
- момент – важнейший параметр ЭМС.
 - коэффициент намагничивания (насыщения).
- коэффициент намагничивания (насыщения).
 |
ЗО – задающий орган; ИФ – интерфейс; ЗИ – задатчик интенсивности; НЗ – нелинейное звено; РП – регулятор положения.
Система управления классифицируется:
1 СУ с общим усилителем, т. е. на усилитель идет обратная связь.
2 СУ с общим усилителем, но раздельным управлением по обратной связи.
3 СУ подчиненного регулирования (имеет место когда сигнал последовательно обрабатывается в сети обратных связей).
Регуляторы делятся:
1 СУ главного движения (винчестеры);
2 СУ подачи (бывает позиционная и следящая).
Обратная связь бывает:
- положительная (отрицательная);
- жесткая (может работать в статике и динамике), гибкая (только в динамике).
РС – регулирование скорости. Сигнал идет от датчика скорости. Этот регулятор должен обеспечить стабильность регулирования.
РТ – регулятор по току. Задача – обеспечить защиту привода по току; формирование интенсивности переходного процесса по моменту, току и скорости.
РН – регулятор напряжения. В цепи есть часть активной и реактивной индукцией.
ЛСУ – логическая система управления. Задача – обеспечить оптимизацию реверса двигателя. Это самый тяжелый режим. ЛСУ обеспечивает оптимизацию реверса привода.
 |
П – преобразователь. Задача – преобразует сигналы малой мощности.
ЭМП – электромеханический преобразователь.
МЧ – механическая часть.
Р – редуктор.
ОУ – объект управления.
 |
1 диапазон регулирования скорости: 
2 статизм:  (расчетный), где
(расчетный), где
n0 – несуществующая скорость при нулевом токе (идеального холостого хода)
Dn – потери скорости
Sзаданный=0,01
 - коэфф. усиления расчетной системы.
- коэфф. усиления расчетной системы.
3 плавность регулирования – определяет дискретность управления. Характеризуется разностью2-х последовательных значений скорости, представляющий собой ступени регулирования.
4 точность регулирования – определяется возможным отклонением регулирующего параметра, от заданных значений под действием возмущающих факторов.
5 привод реверсивный или нет (способен он вращаться в обратную сторону).
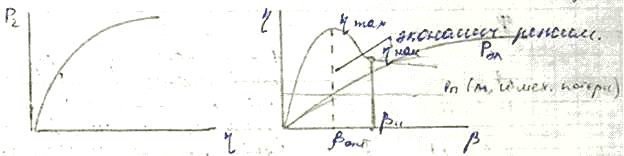
6 экономность регулирования – она определяет стоимостью привода, КПД всей системы, косинусом φ, громоздкостью.
7. колебательность, быстродействие, добротность, перерегулирование.
8. зона регулирования (одно-, двух- зонный)
 |
Современные привода часто работают в обеих зонах – двухзонный.
 |
1.  ;
; 
 по правилу правой руки
по правилу правой руки
2.

по правилу левой руки
 3.
3.
 ;
; 
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 411; Нарушение авторских прав?; Мы поможем в написании вашей работы!