КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Передаточная функция линейной стационарной системы
|
|
|
|
Лекция 2. Структурный анализ Линейных стационарных систем
Тема 1. Линейные автоматические системы
Меню Справка
| Word 2003 | Word 2007 |
| Справка- Microsoft Office Word | Верхняя часть ленты-Справка |
| Показать помощника | Удалено из продукта |
| Office в Интернете | Кнопка Microsoft Office-Параметры Word-Ресурсы-Office в Интернете |
| Свяжитесь с нами | Кнопка Microsoft Office-Параметры Word-Ресурсы-Свяжитесь с нами |
| Проверить наличие обновлений | Кнопка Microsoft Office-Параметры Word-Ресурсы-Проверить наличие обновлений |
| Найти и восстановить | Кнопка Microsoft Office-Параметры Word-Ресурсы-Диагностика |
| Активировать продукт | Кнопка Microsoft Office-Параметры Word-Ресурсы-Активировать продукт |
| Параметры отзывов пользователей | Кнопка Microsoft Office-Параметры Word-Центр управления безопасностью-Защита конфиденциальности-Программа улучшения качества ПО |
| О программе | Кнопка Microsoft Office-Параметры Word-Ресурсы-О программе |
Любая система управления представляет собой совокупность нескольких устройств, в которых происходят явления различной физической природы. Одна и та же система может включать в себя, например, механические, электрические, пневматические и гидравлические элементы.
Эти черты системы взаимодействуют между собой по сложным законам механики, электротехники, гидравлики.
Будем рассматривать элементы, в которых процессы преобразования энергии строго ориентированы, то есть энергия и воздействия передаются только в определенном направлении, обладают детектирующим свойством. Это означает, что выходная величина элемента не влияет на свою входную.
Обычно свойством однонаправленности обладают те элементы системы, которые передают информационные воздействия. К таким элементам относятся измерители и преобразователи сигналов.
Первым этапом при исследовании или конструировании системы управления является составление математического описания ее элементов и системы в целом.
Составление математического описания конструктивного элемента системы управления состоит из следующих последовательно выполняемых процедур: принятие определенных допущений, выбор входных и выходных переменных, выбор системы отсчета для каждой переменной, применение физического принципа, отражающего в математической форме закономерности преобразования энергии или вещества.
Наиболее распространенной формой описания передаточных свойств систем управления и их элементов являются обыкновенные дифференциальные уравнения.
Для элемента, имеющего один входной X(t) и один выходной Y(t) сигнал, обыкновенное дифференциальное уравнение записывается в общем случае следующим образом:

Уравнение называют уравнением динамики или уравнением движения элемента. При этом понятие «движение» употребляется в самом обобщенном смысле.
Уравнение может быть линейным и нелинейным. В него, кроме основных переменных, входят постоянные величины, называемые параметрами.
Числовые значения параметров зависят от конструктивных данных описываемого элемента – масс, индуктивностей, емкостей и т.д.
Если переменная Y, характеризующая состояние элемента, кроме времени зависит еще от другой независимой переменной, которая является пространственной координатой, то элемент описывается дифференциальным уравнением с частными производными. Сам элемент в этом случае называют элементом с распределенными параметрами (распределенными в пространстве).
Большинство объектов управления представляют собой объекты с распределенными параметрами, но при практических расчетах с большей или меньшей степенью приближения их рассматривают как элементы с сосредоточенными параметрами.
Рассмотрим элемент системы управления с несколькими входными и выходными переменными. Такие элементы называют многомерными. Многомерными элементами являются прежде всего сами объекты управления. Например, электрический генератор переменного тока имеет две выходные переменные – напряжение и частоту и две входные переменные – напряжение возбуждения и частоту вращения генератора. Многомерными элементами могут быть сложные управляющие устройства в виде микроЭВМ, микроконтроллеров, выполняющих роль многоканальных регуляторов.
В приведенном примере выходные переменные генератора являются реальными физическими величинами, которые, как правило, поддаются измерению. Однако, как будет показано ниже, в качестве выходных переменных могут фигурировать некоторые абстрактные переменные, например производные от реальных выходных переменных, не имеющие конкретного физического смысла, и тогда даже элемент с одним входом и одним выходом, но описываемый дифференциальным уравнением выше первого порядка, может рассматриваться как многомерный.
Математическое описание передаточных свойств любых линейных многомерных элементов может быть осуществлено в двух различных видах:
· при помощи динамических характеристик (дифференциальных уравнений, временных, передаточных и частотных функций), записанных для реальных входных и выходных переменных;
· при помощи дифференциальных уравнений в форме Коши, записанных для абстрактных выходных переменных (переменных состояния).
Обозначим для краткости первый способ ВВ (вход – выход), а второй – ПС (переменные состояния).
Способ описания “вход – выход”
Пусть имеется многомерный элемент (рис.2.1) с m входными переменными 
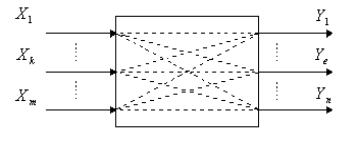
Рис. 2.1. Многомерный элемент с n измеряемыми (наблюдаемыми) выходными переменными 
В общем случае каждая входная переменная связана с каждой выходной переменной.
Если взаимосвязи по всем каналам  линейны или линеаризованы, то в общем случае элемент можно описать следующей системой n неоднородных дифференциальных уравнений:
линейны или линеаризованы, то в общем случае элемент можно описать следующей системой n неоднородных дифференциальных уравнений:

= 2.1
2.1
Заметим, что совпадение наивысшего порядка m производной  с числом входных переменных является условным.
с числом входных переменных является условным.
Систему автоматического управления можно представить в виде соединения звеньев. Для анализа работы САУ необходимо иметь зависимости, связывающие входные и выходные сигналы звеньев. Эти зависимости определяются с помощью дифференциальных уравнений.
Рассмотрим простейший случай линейного звена непрерывного действия, у которого все процессы описываются с помощью линейных дифференциальных уравнений. Связь между выходной ( Y ) и входной (X) величинами линейного звена или линейной системы выражается линейным дифференциальным уравнением с постоянными коэффициентами.
Для описания свойств звеньев более удобно пользоваться не непосредственно дифференциальными уравнениями, а следующими коэффициентами или функциями, вытекающими из уравнения (2.1) и также полно определяющими связь между входной и выходной величинами звеньев:
· передаточной функцией;
· переходной характеристикой (функцией);
· комплексным коэффициентом передачи (ККП).
Удобной формой записи линейных дифференциальных уравнений является символическая или операторная.
Переход к этой форме осуществляется введением сокращенного условного обозначения операции дифференцирования.
Преобразование Лапласа основано на двух следующих формулах:
- прямого преобразования Лапласа
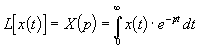
| (2.2) |
- обратного преобразования Лапласа
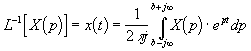 . .
| (2.3) |
Здесь  - обозначения прямого и обратного преобразования Лапласа.
- обозначения прямого и обратного преобразования Лапласа.
Преобразованная по Лапласу величина называется изображением и обозначается через  соответственно для входной и выходной величин. Под "
соответственно для входной и выходной величин. Под " " подразумевается комплексная частота
" подразумевается комплексная частота  . Если
. Если  , преобразование Лапласа превращается в его частный случай - преобразование Фурье.
, преобразование Лапласа превращается в его частный случай - преобразование Фурье.
В справочниках по математике имеются таблицы преобразования Лапласа для различных функций, встречающихся в практических задачах.
Передаточной функцией линейного звена K(p) называется отношение изображения выходной величины Y(p) к изображению входной величины X(p) при нулевых начальных условиях, т.е. при отсутствии запаса энергии в звене:
 2.4
2.4
Рассматривая линейное дифференциальное уравнение (2.1) и находя изображение для левой и правой частей уравнения, получаем

 2.5
2.5
Отсюда
 2.6
2.6
Определение 2.1. Отношение изображения по Лапласу выходного сигнала к входному сигналу, определенно при начальных нулевых условиях, называется передаточной функцией.
Передаточная функция так же, как и дифференциальное уравнение, полностью определяет динамические свойства автоматической системы. Зная передаточную функцию АС и изображение входного сигнала, легко найти изображение выходного сигнала:
 2.7
2.7
Из выражения (2.7), используя обратное преобразование Лапласа, получим
 2.8
2.8
Передаточная функция не зависит от вида входного сигнала и полностью определяется структурой и параметрами линейной системы.
Рассмотрим основные свойства передаточной функции. Из выражения (2.6) видно, что в общем случае передаточная функция представляет собой дробно-рациональную функцию комплексного переменного «р». Обозначим
Полином в числителе передаточной функции:
 2.9
2.9
Полином в знаменателе передаточной функции
 2.10
2.10
Корни уравнения В(р)=0 называются нулями передаточной функции. Корни уравнения А(р)=0 называются полюсами передаточной функции.
Из теории обыкновенных дифференциальных уравнений с постоянными коэффициентами известно, что уравнение
 2.11
2.11
Представляет собой характеристическое уравнение дифференциального уравнения (2.1).
Корни характеристического уравнения (2.11) позволяют определить общее решение однородного дифференциального уравнения
 2.12
2.12
Это решение определяет поведение АС при отсутствии внешних воздействий, т.е. свободное движение системы. С характером свободного движения АС тесно связаны такие фундаментальные автоматики как устойчивость и качество процесса регулирования. Поэтому в теории автоматического управления большое значение придается исследованию полюсом передаточной функции, а полином (2.10) называют характеристическим полиномом автоматической системы.
2.2. Структурная схема автоматической системы.
Преобразование структурных схем.
Структурная схема — это совокупность элементарных звеньев объекта и связей между ними, один из видов графической модели. Под элементарным звеном понимают часть объекта, системы управления и т. д., которая реализует элементарную функцию.
Элементарные звенья изображаются прямоугольниками, а связи между ними — сплошными линиями со стрелками, показывающими направление действия звена. Иногда в поле прямоугольника вписывают математическое выражение закона преобразования сигнала в звене, в этом случае схему иногда называют алгоритмической.
В схемотехнике вместе со структурной различают также принципиальную и функциональную схему. Среди всех этих схем структурная наименее детализирована.
Она предназначена для отражения общей структуры устройства, то есть его основных блоков, узлов, частей и главных связей между ними. Из структурной схемы должно быть понятно, зачем нужно данное устройство и что оно делает в основных режимах работы, как взаимодействуют его части. Обозначение структурной схемы могут быть достаточно свободными, хотя некоторые общепринятые правила всё же лучше выполнять[1].
Структурная схема АС отличается от функциональной тем, что она дает полное математическое описание системы, но не обязательно должна соответствовать структуре описываемой системы. Элемент структурной схемы не обязательно соответствует реальному элементу АС.
(Иванов А. А. Теория автоматического управления: Учебник. — М.: Национальный горный университет. — 2003. — 250 с.)
При наличии большого числа элементов в системе пользуются структурным методом, согласно которому уравнение всей системы получают на основе алгоритмической схемы при помощи нескольких простых правил.
Сущность метода состоит в том, что по известным передаточным функциям отдельных элементов системы, представляющих собой детектирующие звенья однонаправленного действия, используя правила последовательного, параллельного и встречно-параллельного (с обратной связью) соединений звеньев, получают эквивалентную передаточную функцию, или передаточную функцию эквивалентного звена. В результате получают одноконтурную замкнутую цепочку, состоящую из нескольких эквивалентных звеньев.
Причем эта цепочка может иметь несколько входов и несколько выходов. Далее согласно одноконтурной схеме записывают передаточные функции между разомкнутыми входами и выходами системы.
Структурные преобразования схем являются допустимыми, если они сохраняют неизменными все входные и выходные сигналы системы.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 2068; Нарушение авторских прав?; Мы поможем в написании вашей работы!