КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция № 8
|
|
|
|
«ПОЛУПРОВОДНИКОВЫЕ ПРЕОБРАЗОВАТЕЛИ В СУДОВОМ
ЭЛЕКТРОПРИВОДЕ»
10.1 Классификация судовых преобразовательных устройств
В зависимости от назначения различаются следующие типы судовых преобразователей.
1) Выпрямители общего назначения.
2) Зарядные выпрямительные агрегаты.
3) Сварочные выпрямительные агрегаты.
4) Преобразователи для питания систем катодной защиты корпуса судна.
5) Выпрямители для систем возбуждения судовых электрических машин.
6) Преобразователи для валогенераторных установок.
7) Преобразователи для управления приводом постоянного или переменного тока.
8) Преобразователи для гребных электрических установок.
10.2 Принципы построения схем преобразователей
для управления приводом постоянного тока
Тиристорный привод постоянного тока применяется, прежде всего, для замены системы генератор - двигатель. Эта замена позволяет улучшить массогабарит-ные показатели, управляемость и КПД привода.
Тиристорные преобразователи применяются для питания силовых цепей двигателей и обмоток возбуждения. В зависимости от назначения привода преобразователи бывают реверсивные и нереверсивные. В нереверсивных преобразователях используются простые тиристорные схемы управляемых выпрямителей. В реверсивных выпрямителях схемы усложняются в зависимости от способа изменения направления вращения:
1) изменением направления тока возбуждения без изменения направления тока в цепи якоря электродвигателя;
2) изменением направления тока в цепи якоря с помощью двух вентильных групп.
 В первом случае для питания обмотки возбуждения двигателя может быть применен реверсивный тиристорный преобразователь, каждая из групп которого выполенена по однофазной мостовой схеме, а для питания цепи якоря - нереверсивный трехфазный выпрямитель (рис. 10.1). Такая схема питания двигателя проста и дешева, но вследствие большой постоянной времени обмотки возбуждения двигателя снижаются динамические показатели привода. Особенно это заметно в приводах мощностью более 100 кВт.
В первом случае для питания обмотки возбуждения двигателя может быть применен реверсивный тиристорный преобразователь, каждая из групп которого выполенена по однофазной мостовой схеме, а для питания цепи якоря - нереверсивный трехфазный выпрямитель (рис. 10.1). Такая схема питания двигателя проста и дешева, но вследствие большой постоянной времени обмотки возбуждения двигателя снижаются динамические показатели привода. Особенно это заметно в приводах мощностью более 100 кВт.
Второй способ реверсирования реализуется с использованием схемы и способа управления описанным в п. 5.4.
При использовании ти-ристорного преобразователя в электроприводе следует учитывать, что внешние характеристики электропривода будут иметь линейный характер только в реверсивных преобразователях с согласованным управлением (см. п. 5.4.2). Во всех других случаях они имеют две области: непрерывного и прерывистого токов. В области прерывистых токов наблюдается нелинейная зависимость среднего значения напряжения
от тока, при этом с изменением тока якоря напряжение преобразователя изменяется весьма существенно.
Отрицательные последствия такого режима проявляются в замкнутых системах управления, которые нашли широкое применение в судовом электроприводе. Система автоматического управления при холостом ходе привода или малых нагрузках оказывается практически разомкнутой, и при набросе нагрузки происходит снижение скорости привода, пока преобразователь не войдет в зону непрерывного тока. Для ограничения зоны прерывистых токов в цепь якоря необходимо включать значительную индуктивность (см. п. 3.1).
16. Тиристорные электроприводы постоянного тока
Тиристорный преобразователь в ЭП постоянного тока выполняет те же функции, что и электромашинный в системе Г-Д, т.е. осуществляет преобразование переменного тока в постоянный и управление ЭД (пуск, торможение, реверсирование, регулирование угловой скорости, получение специальных механических характеристик).
В большинстве преобразователей, применяемых для ЭП, в качестве силовых вентилей используются тиристоры, выполняющие функции выпрямительных устройств.
Выпрямление напряжения происходит при открытии соответствующего тиристора, для чего на его управляющий электрод подается соответствующий импульс.
Таким образом, время подачи импульса на управляющий электрод определяет значение выпрямленного напряжения. Это время, принимаемое по отношению к началу естественной коммутации тиристоров и выражаемое в электрических градусах, обозначается углом α. Нетрудно заметить, что с изменением угла α (угла запаздывания или угла управления) значение выпрямленного напряжения изменяется и будет тем меньше, чем больше угол α.
Таким образом, сущность управления тиристорами заключается в том, чтобы в какой-то момент времени выработать сигнал и подать его на управляющий электрод. Сигнал в схеме управления вырабатывает система импульсно-фазового управления.
Тиристорные преобразователи выполняются как с 1-фазными, так и с многофазными схемами выпрямления.
Преобразователи с однофазными схемами выпрямления применяются в установках малой мощности (до 10-15 кВт).
Преобразователи с многофазными схемами выпрямления предназначаются, как правило, для питания якорных цепей ЭД мощностью более 15 кВт.
В судовых ЭП применяются в основном 3-фазные схемы выпрямления, которые по сравнению с 1-фазными позволяют достичь лучшего использования трансформаторов и вентилей.
Для ограничения пульсаций тока до допустимого уровня последовательно с якорем ЭД включается сглаживающий дроссель, поглощающий энергию цепи в момент ее максимального значения и отдающий энергию в цепь в период ее наименьшего значения (тем самым ограничивается зона прерывистых токов).
Трехфазные тиристорные преобразователи применяются для реверсивных и нереверсивных ЭП в том случае, когда требуется получить большой диапазон регулирования скорости и обеспечить высокое качество протекания динамических режимов ЭП.
10.3 Принципы построения схем преобразователей для управления приводом переменного тока
Использование асинхронных двигателей в регулируемых электроприводах считается приоритетным направлением этой области электроэнергетики.
На судах применяются следующие способы управления асинхронным электроприводом:
1) параметрическое регулирование в цепи статора;
2) широтно-импульсное регулирование в цепи ротора;
3) регулирование путем введения в цепь ротора двигателя добавочной ЭДС;
4) частотное управление.
На рис. 10.2 показана схема, с помощью которой можно реализовать первые два способа управления. Параметрическое регулирование частоты вращения двигателя осуществляется с помощью тиристорных коммутаторов VS1-VS10 путем изменения подводимого к статору напряжения. Схема позволяет производить пуск, торможение и реверс двигателя. Выбор вентилей при длительном режиме работы производится по номинальному току двигателя и проверяется по его пусковому току. В приведенной на рис. 10.2 схеме линейное напряжение прикладывается к двум последовательно включенным тиристорам и делится пропорционально их обратным сопротивлениям. При учете 50% разброса обратного тока тиристоров следует выбирать вентили не ниже 4-го класса. Данный способ необеспечивает регулирование частоты вращения в широких пределах, что снижает его эффективность.
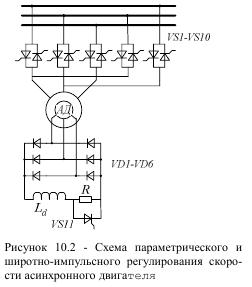
Широтно-импульсное регулирование осуществляется с помощью устройства, включающего диоды VD1-VD6, тиристор VS11, сопротивление R и индуктивность Ld. Путем периодического включения тиристора VS11 формируются импульсы выпрямленного тока моста на диодах VD1-VD6. Изменение среднего тока в цепи ротора эквивалентно изменению сопротивления цепи ротора и приводит к изменению скольжения и частоты вращения двигателя. Выбор вентилей производится исходя из максимальной величины ЭДС фазы ротора Е2 (в каталогах для двигателей с фазным ротором приводится значение напряжения U2 при заторможенном роторе машины) и величины сопротивления R.
Регулирование частоты вращения асинхронного двигателя, работающего в каскадной схеме, основано на введении в цепь ротора двигателя добавочной ЭДС. Схема асинхронно-вентильного каскада приведена на рис. 10.3. Выпрямитель, собранный на вентилях VS1-VS6, и инвертор на тиристорах VS7-VS12 образуют преобразователь частоты ведомый сетью, через который обмотка ротора двигателя связана с источником питания. В цепи выпрямленного тока действуют два напряжения: выпрямленное напряжение ротора и противоположное ему по знаку выпрямленное напряжение сети.
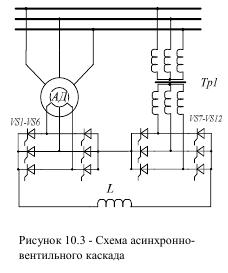
Регулирование частоты вращения двигателя можно осуществлять путем изменения угла управления одного из преобразователей. Целесообразно регулировать частоту вращения двигателя путем воздействия на ин-верторную группу. Приведенная схема позволяет осуществлять как понижение частоты, так и ее повышение выше синхронной, при этом инверторная группа переходит в выпрямительный режим, а выпрямительная в инверторный.
Вентили роторной и инверторной групп выбираются по среднему току через вентиль и максимальному обратному напряжению:
Трансформатор инвертора выбирается по току и напряжению вторичных обмоток. Напряжение вторичной обмотки трансформатора зависит от глубины регулирования скорости вращения двигателя, т.е. от Smax.
Ток вторичной обмотки трансформатора I2m выбирается по величине выпрямленного тока ротора I d, соответствующего длительной и среднеквадратичной нагрузке двигателя:
Недостатком схемы считается низкое значение коэффициента мощности и КПД, а также очевидная громоздкость оборудования.
Рассмотренные способы регулирования асинхронного электропривода имеют ряд недостатков, которые практически отсутствуют при частотном регулировании. Указанный способ управления в настоящее время является приоритетным и единственно верным решением при разработке систем автоматизированного электропривода.
При частотном управлении асинхронным двигателем для обеспечения его нормальной работы с изменением частоты необходимо регулировать напряжение, подводимое к статору. Применение такого способа управления позволяет повысить
КПД и коэффициент мощности двигателя. Развитие теории векторного управления двигателем и применение ее на практике позволяет полностью подчинить привод поставленной задаче и усложнить алгоритмы работы. Реализация векторного управления возможна только с применением современных преобразователей частоты.
Для построения систем частотного управления используются непосредственные преобразователи частоты или преобразователи частоты со звеном постоянного тока.
17. Тиристорные преобразователи частоты с промежуточным звеном постоянного тока
Использование ЭД постоянного тока с тиристорным управлением значительно повышает технико-экономические показатели регулируемых ЭП, но не устраняет ряда существенных недостатков, обусловленных конструкцией машин постоянного тока. Поэтому более целесообразным является использование в таких приводах АД. Однако многоскоростные АД с короткозамкнутым ротором недостаточно полно удовлетворяют требованиям, предъявляемым к судовому регулируемому ЭП. Резкое повышение регулировочных свойств АД стало возможным с разработкой тиристорных схем управления.
На судах применяют следующие способы управления тиристорным приводом:
1.частотное параметрическое регулирование в цепи статора;
2.широтно-импульсное регулирование в цепи ротора;
3.регулирование путем введения в цепь ротора АД добавочной ЭДС.
Основным видом регулирования ЭП переменного тока является частотный. Частотное регулирование, пуск и торможение - это наиболее экономичные методы управления АД. Этот способ осуществляется благодаря тиристорным преобразователям частоты, которые при этом виде регулирования должны преобразовывать напряжение сети промышленной частоты в напряжение другой частоты, причем его амплитуда, частота и фаза должны изменяться в широком диапазоне. Частота-это временной параметр переменного напряжения, определяющий, по существу, интервалы времени, через которые изменяется знак этого напряжения. В ТПЧ это достигается включением и отключением тиристоров в функции времени по такому закону, который обеспечивал бы подключение источника энергии к нагрузке (двигатель) с задаваемой частотой смены знака среднего значения напряжения на этом выходе.
Выделяют 2 основных класса ТПЧ:
1. с промежуточным звеном постоянного тока;
2. с непосредственной связью питающей сети и цепей нагрузки (в литературе иногда называются преобразователями с неявно выраженным звеном постоянного тока).
18. Тиристорные преобразователи частоты с непосредственной связью
Данный класс преобразователей, получивших название непосредственных преобразователей частоты, характерен 1 -кратным преобразованием энергии.
Потребляемая из сети переменного тока электроэнергия с неизменными напряжением и частотой преобразуется в одном силовом устройстве в энергию переменного тока с регулируемыми по амплитуде и частоте напряжением и током нагрузки, в качестве которой служит 3-фазный АД.
Рассмотрим принципы преобразования 3-фазного напряжения сети в 1-фазное напряжение пониженной частоты. Это может быть достигнуто применением двух 3-фазных 1-полупериодных групп тиристоров, включенных встречно-параллельно (рис. 46, а).Достоинствами НПЧ, в которых коммутация осуществляется за счет напряжения сети, являются:
1.высокий КПД вследствие 1-крат-.ного преобразования энергии; широкий диапазон регулирования;
2.возможность передачи мощности в обоих направлениях между источником и нагрузкой.
3.Также НПЧ могут работать в режиме рекуперации энергии во всем диапазоне регулирования угловой скорости (вплоть до полной остановки ротора двигателя).
Недостатками этих преобразователей являются:
1.низкий коэффициент мощности со стороны питающей сети,
2.большая доля высших гармоник и
3.ограниченность максимальной выходной частоты тока.
Использовать НПЧ целесообразно в низкоскоростпых реверсивных ЭП (например, палубных механизмов).
19. Управление асинхронными двигателями с использованием тиристорных преобразователей частоты
В электроприводе ТПЧ в основном служат для регулирования частоты тока, поступающего на статор АД.
Изменяющийся по частоте ток приводит к изменению угловой скорости поля статора, в результате пропорционально изменяется угловая скорость ротора. Плавное изменение частоты тока статора и широкий диапазон ее изменения позволяют плавно изменять угловую скорость АД в широких пределах.
Применение ТПЧ улучшает также другие качественные показатели регулируемого ЭП: прежде всего это относится к пусковым и тормозным режимам АД.
Следует отметить, что пуск АД проводят при уменьшенной частоте и по мере его ускорения частоту тока, подаваемого на статор, увеличивают.
Увеличенный пусковой момент способствует большему ускорению ротора АД и уменьшает время пуска, что очень важно для ЭП работающих в повторно-кратковременном режиме. В последующем для увеличения утловой скорости ротора АД до номинальной частоту тока статора постепенно увеличивают. Если в промессе ускорения вращения ротора частоту увеличивать медленно, то при работе на каждой частотной характеристике АД достигает угловой скорости на ее рабочей части и переход на большую скорость не сопровождается большими бросками тока. Такой частотный пуск называется «мягким». При «мягком» пуске АД потери энергии и потребляемая энергия сравнительно невелики, но увеличивается время пускового процесса. Если же скорость изменения частоты тока статора большая, то ротор АД не успевают достичь скорости, соответствующей критическому скольжению и переход с одной частотной характеристики на другую происходит в области их неустойчивых частей. Такой режим частотного пуска, характерный большими значениями тока и потерь, называют «жестким».
Очевидно, в ТПЧ наиболее рационально устанавливать такую скорость изменения частоты тока, при которой переход с одной частотной механической характеристики на другую будет происходить при максимальных моментах. Указанное условие будет выполняться, когда темп или ускорение частоты тока в статоре будет одинаковым с ускорением ротора.
На судах ТПЧ применяют в основном в реверсивных ЭП для которых характерны режимы торможения противовключением и рекуперативный:
Применение ТПЧ позволяет предварительно понизить частоту тока, подаваемого на статор АД, при этом пропорционально уменьшится индуктивное сопротивление ротора, соs ф увеличится и это приведет к увеличению тормозного момента (соответственно время тормозного процесса сокращается). Одновременно при уменьшении частоты тока мгновенно снижается угловая скорость поля статора и скорость ротора оказывается выше скорости поля статора. Это способствует работе АД на небольшом отрезке времени в режиме рекуперации, что дополнительно сокращает время реверса.
Режим рекуперации может быть не только при реверсе, но и при регулировании угловой скорости в сторону уменьшения, когда приходится снижать частоту тока статора. В подобных случаях, так же как и в предыдущем, переход работы АД с одной механической характеристики на другую происходит в зоне рекуперативного торможения, Переход сопровождается бросками тока, значения которых зависят от скорости изменения частоты. Аналогично, как и при пуске, переходный режим может быть «мягким» и «жестким». Для уменьшения бросков тока и потерь при регулировании стремятся скорость уменьшения частоты иметь небольшую, т.е. переходный процесс выполняют по возможности «мягким». Задавая определенные законы изменения частоты с помощью системы управления ТПЧ, можно получить гамму механических характеристик АД, отвечающих оптимальному режиму его работы.
20. Регулирование угловой скорости асинхронных двигателей с помощью тиристоров
Кроме рассмотренного частотного управления АД, тиристорные схемы позволяют изменять угловую скорость АД и другими способами. Регулирование угловой скорости благодаря переключающим способностям тиристоров в этих схемах построено на изменении рабочих параметров АД, которое достигается:
1.изменением напряжения, подаваемого на статор:
2.импульсным регулированием в цепи ротора;
3.введением добавочной ЭДС в цепь ротора.
Изменения напряжения, подаваемого на статор. При изменении напряжения тиристорным регулятором изменяется магнитный поток статора, а это приводит к изменению вращающего момента АД: тем самым нарушается условие равновесия, которым характеризуется установившееся движение. В случае уменьшения напряжения вращающий момент становится меньше момента сопротивления и ротор АД будет замедляться. Уменьшение скорости приводит к увеличению скольжения, ЭДС, тока ротора и вращающего момента, Когда при замедлении наступит равновесие моментов, то ротор АД будет вращаться с новой установившейся скоростью, которая будет меньше, чем до снижения напряжения на зажимах статора.
Применение тиристорных регуляторов напряжения позволяет осуществлять плавный пуск АД путем постепенного уменьшения угла α, а также динамическое торможение.
Устройство регуляторов напряжения значительно проще и дешевле описанных ранее схем ТПЧ. Однако КПД двигателей с регуляторами напряжения невысок, поэтому приходится увеличивать габаритные размеры АД во избежание превышения допустимой температуры вследствие роста тока и ухудшения вентиляции.
На судах тиристорные регуляторы напряжения используются в ЭП кранов и лебедок, где большие моменты при малых угловых скоростях требуются лишь в течение небольшой части рабочего цикла.
Импульсное регулирование в цепи ротора. Сущность импульсного регулирования состоит в том. что для изменения угловой скорости АД осуществляется периодическое кратковременное изменение его параметров, благодаря чему дозируется поток энергии, передаваемой от сети к АД и в обратном направлении.
Следует отметить, что вследствие небольшого значения мощности, необходимой для управления тиристорным ключом, данный способ позволяет получить бесступенчатое плавное изменение угловой скорости. Механические характеристики АД при данном способе регулирования можно получить более жесткими по сравнению с реостатными, так как при изменении нагрузки на валу АД имеется возможность изменять управляющий сигнал таким образом, чтобы скорость практически не менялась.
Введение добавочной ЭДС в цепь ротора. Путем подключения к цепи ротора АД независимого источника энергии переменная ЭДС этого источника подается в противофазе с ЭДС ротора.
Способ регулирования введением добавочной ЭДС связан с преобразованием энергии постоянного тока в переменный или наоборот, поэтому указанные схемы имеют пониженные значения коэффициента мощности и КПД. Такой способ регулирования наиболее целесообразен лишь при небольшом диапазоне регулирования скорости ЭП, что в условиях судна применимо для отдельных насосов,
2.3. Регулирование скорости в системе двойного рода тока (УВП – Д)
В таких системах исполнительный двигатель постоянного тока получает питание от судовой сети через управляемый вентильный преобразователь ВП (рис. 9.5).
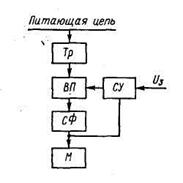
Рис. 9.5. Структурная схема тиристорного электропривода постоянного тока
В качестве вентилей используются управляемые полупроводниковые диоды – тиристоры.
В общем случае такой электропривод состоит из следующих основных элементов:
1. силовой трансформатор Тр;
2. вентильный преобразователь ВП;
3. сглаживающий фильтр СФ;
4. электродвигатель М;
5. система управления СУ.
Силовой трансформатор Тр служит для согласования номинального напряжения двигателя с выходным напряжением преобразователя.
Вентильный преобразователь выпрямляет напряжение и регулирует его в нужных пределах. Для питания цепей якоря двигателя применяют однополупериодные схемы с нулевым выводом (рис. 9.6, а) или двухполупериодные мостовые схемы (рис.9.6., б).
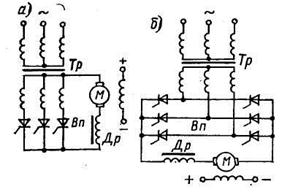
Рис. 9.6. Схемы включения якоря двигателей постоянного тока на вентильный преобразователь: с нулевым выводом (а); мостовая (б)
В таких схемах обмотки возбуждения двигателей обычно получают питание от общей сети переменного тока через маломощные однофазные выпрямители.
Сглаживающий фильтр (дроссель Др на рис.9.6) предназначен для уменьшения пульсаций выпрямленного напряжения. При этом улучшаются условия коммутации и уменьшается нагрев обмотки якоря двигателя.
Система управления СУ изменяет угол отпирания тиристоров α. Вследствие чего изменяется выпрямленное напряжение на якоре исполнительного двигателя, а значит, и его скорость
При этом, при малых скоростях якоря этот угол близок к 90º, а для разгона якоря
СУ непрерывно уменьшает этот угол. При номинальном (наибольшем) напряжении на якоре угол α = 0º.
Механические характеристики двигателя при разных значениях угла отпирания тиристоров α приведены на рис. 9.7.
Они подобны механическим характеристикам исполнительного двигателя в системе Г – Д (рис. 9.4).
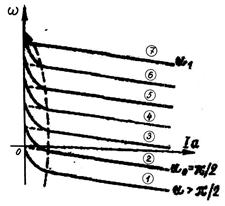
Рис. 9.7. Электромеханические характеристики двигателя при разных значениях угла α
На рис. 9.7 штриховой линией показана граница между режимами непрерывного (справа от пунктирной линии) и прерывистого (слева от этой линии) токов якоря двигателя.
Электромеханические характеристики имеют такие особенности:
1. при уменьшении угла отпирания тиристоров от α = π / 2 = 90º (характеристика 2) до α = 0º (характеристика 7) скорость двигателя увеличивается, двигатель работает в двигательном режиме;
= 0º (характеристика 7) скорость двигателя увеличивается, двигатель работает в двигательном режиме;
2. при увеличении угла α свыше 90º (характеристика 1) ток якоря двигателя не изменяет направление, но двигатель реверсирует и переходит в режим тормозного спуска. при котором электромагнитный момент двигателя, направленный на подъем, ограничивает скорость спуска тяжелого груза или судового якоря с якорь-цепью.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 1615; Нарушение авторских прав?; Мы поможем в написании вашей работы!