КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Модуль 2
|
|
|
|
Лекція №3
РОЗДІЛ 1.2 ПЕРВИННІ ВИМІРЮВАЛЬНІ ПЕРЕТВОРЮВАЧІ СИСТЕМ
АВТОМАТИКИ
ТЕМА: Призначення, класифікація і основні параметри перетворювачів.
Датчики температури.
План:
1. Призначення, класифікація і основні параметри перетворювачів.
2. Інтелектуальні датчики
3. Датчики температури
3.1. Контактні термометри.
3.2. Металевітермометри опору.
3.3. Напівпровідникові терморезистори, позистори.
3.4. Термопари.
3.5.Дилатометричні датчики температури.
4.Нормувальні перетворювачі
Термін часу: 90хв.
1. Призначення, класифікація і основні параметри перетворювачів.
Вимірювальний перетворювач — технічний засіб служить для перетворення вимірюваної величини в іншу величину або вимірювальний сигнал, зручний для обробки, зберігання, подальших перетворень, індикації і передачі, але безпосередньо не сприймається оператором. ВП або входить до складу якого-небудь вимірювального приладу (вимірювальної установки, вимірювальної системи і ін.), або застосовується разом з яким-небудь вимірювальним пристроєм.
Класифікація
По місцю у вимірювальному колі:
Первинний вимірювальний перетворювач (датчик) — вимірювальний перетворювач, на якого безпосередньо впливає вимірювана фізична величина. Первинний вимірювальний перетворювач є першим перетворювачем у вимірювальному ланцюзі вимірювального приладу;
Вторинний вимірювальний перетворювач — вимірювальний перетворювач, що займає місце у вимірювальному ланцюзі після первинного перетворювача.
По характеру перетворення:
перетворювачі електричних величин в електричних (резистивні дільники, підсилювачі, трансформатори, шунти і тому подібне); перетворювачі неелектричних в неелектричних (важелі, пружини, редуктори, мембрани);
перетворювачі електричних в неелектричних (електромотори, освітлювачі, двигуни, електричні нагрівачі, холодильники);
перетворювачі неелектричних в електричні.
По виду залежності ФВ величин від часу на вході і на виході:
аналогові (вхідні і вихідні величини є аналоговими сигналами, можуть змінюватися безперервно і гладко);
цифрові (дискретні; вхідні і вихідні величини змінюються дискретно);
аналого-цифрові (АЦП) (вхідний сигнал аналоговий, вихідний – дискретний);
цифро-аналоговий (ЦАП) (вхідний – цифровий, вихідний – аналоговий).
Класифікація вимірювальних перетворювачів
КЛАСИФІКАЦІЯ ДАТЧИКІВ (первинних вимірювальних перетворювачів).
ДАТЧИКОМ (первинним вимірювальним перетворювачем) – називається пристрій, який перетворює контрольовану величину у іншу величину, зручну, для передачі і подальшої обробки.
По роду енергії вихідної величини – електричні і неелектричні (наприклад: медичний тонометр, лічильники води,газу,термометри).
До неелектричних датчиків відносяться: механічні, гідравлічні, пневматичні, термічні, оптичні, акустичні, радіохвильові, ядерні.
Електричні датчики
По виду вихідної величини електричні датчики поділяються на: параметричні, і генераторні.
Параметричними називаються датчики, які в результаті впливу на них змінюють свій опір, індуктивність або ємність (терморезистори, реостатні, тензометричні, індуктивні, ємнісні та ін).
Пасивні датчики (параметричні) під впливом вхідної величини змінюють свої електричні параметри: опір, ємкість або індуктивність. На відміну від активних (генераторних) датчиків пасивні (параметричні) датчики для набуття відповідного значення вихідної напруги або струму включаються в електричний ланцюг із зовнішнім джерелом живлення.
Генераторними називаються датчики у яких неелектрична величина перетворюється в електрорушійну силу (е.р.с.) (термопари, фотодатчики, тахометри, індукційні).У генераторних датчиках вимірювана величина викликає генерацію електричного сигналу — струму, напруги, заряду, частоти (I, U, q, f) і так далі Вони є активними датчиками.
По принципу дії електричні датчики поділяються на:
Датчики активного опору – які при зміні вхідної величини, наприклад: температури, світла, внаслідок механічної дії та ін змінюють свій опір. До них відносяться контактні, потенціометричні, вугільні, тензометричні датчики, термометри опору, фоторезистори, а також контактні датчики (кінцеві, вимикачі, мікроперемикачі і т.д.)
Індуктивні датчики – з рухомим якорем, з рухомим осердям.
Ємнісні датчики – з змінною відстанню між пластинами, з зміною площею пластин, з змінним діелектричним середовищем.
Термоелектричні – термопари,
Фотоелектричні – фотоелементи.
П’єзоелектричні, гальванічні.
Електромашинні – тахогенератори постійного струму, синхронні, асинхронні.
За своїм призначенням поділяються на датчики лінійних і кутових переміщень, частоти обертання, тиску, зусиль, моментів, рівня, вологості, витрати, температури, освітленості і т.
За характером зміни вхідного сигналу поділяють датчики неперервної дії, які вдають сигнал неперервно, і дискретної дії, у яких значеннях вихідного сигналу у деякі проміжки часу дорівнює нулю.
Основними параметрами, які характеризують датчик є чутливість, інерційність і похибка.
Чутливість – це відношення зміни вихідної величини до зміни вхідної величини, тобто S = Δy/Δx
Чутливість має розмірність, що залежить від фізичної природи вхідної і вихідної величини.
Інерційність – це деяке запізнення у вимірюваннях регульованої величини в певний момент часу.
Інерційність виникає якщо значна маса частини елемента, якщо є теплова інерція елемента, яка залежить від геометричних розмірів елемента, виду матеріалу і середовища, де вимірюється температура
Похибка (АБСОЛЮТНА) – це різниця між заданим вимірюванням і дійсним значенням регульованої величини:
Δх вих. = Х зад – Х дійсне.
У відносних одиницях. δ = (Х зад / Х вих дійсне) 100%
Основні структурні схеми підключення первинних перетворювачів
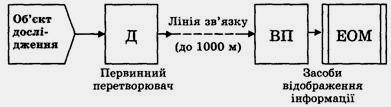
Схема вмикання первинних перетворювачів (датчиків) до ЕОМ

Первинний перетворювач (датчик Д)може мати як вихідний уніфікований сигнал так і не уніфікований сигнал.У іншому випадку використовують нормуючі перетворювачі НП|.
2. Інтелектуальні датчики (Сенсор + мікроконтроллер = інтелектуальний датчик)
Автоматизація збору і обробки технологічної інформації вимагає застосування датчиків, здатних на щось ще крім видачі повідомлень про включення-виключення. Інтелектуальний датчик здатний самостійно підстроюватися під умови експлуатації і безперервно регулювати свою чутливість в цілях досягнення максимальної ефективності.
Своїм інтелектом датчики зобов'язані мікропроцесорним технологіям. Мікропроцесор -- це мозок датчика, що дозволяє пристрою "вивчати" умови, в яких вІн працює. Будучи самонавчальною мікропроцесорною системою, такий датчик здатний обробляти великі об'єми інформації з високою швидкістю.
Можна дотримуватися наступної загальної класифікації інтелектуальних датчиків:
1. Датчики, що мають аналогово-цифровий перетворювач (АЦП) і інтерфейс для зв'язку з ПЕВМ типа Rs-232, Rs-422, Rs-485. Пристрої даного типа не мають вбудованого мікроконтроллера і здійснюють лише оцифрування аналогового сигналу з подальшою передачею на ПЕВМ.
2. Датчики, АЦП, що мають, мікроконтроллер і інтерфейс зв'язку. Такі пристрої здійснюють внутрішню корекцію отримуваного аналогового сигналу, а ряд з них вже використовують протоколи зв'язку типа Hart, Modbus і ін. Налаштування параметрів даних датчиків здійснюється в основному локально (уручну за допомогою коммуникаторов різних типів).
3. Датчики, АЦП, що мають, мікроконтроллер (або спеціалізований мікропроцесор) і дуплексний зв'язок з ПЕВМ. Подібні пристрої мають в основному інтерфейс Rs-485 і здійснюють зв'язок з ПЕВМ по протоколах більш високого рівня: Profibus, Fieldbus Foundation і ін. Дані прилади дозволяють операторові безпосередньо з пульта управління здійснювати налаштування їх параметрів і режимів роботи, проводити діагностику і калібрування. Тому датчики цієї групи можна називати «інтелектуальними».
Мікроконтроллер - комп'ютер на одній мікросхемі. Призначений для управління різними електронними пристроями і здійснення взаємодії між ними відповідно до закладеної в мікроконтролер програми. На відміну від мікропроцесорів, мікроконтролери містять вбудовані додаткові пристрої. Ці пристрої виконують свої завдання під управлінням мікропроцесорного ядра мікроконтроллера.
Сигнал 4-20мА
| Датчик | АЦП | 
| МК | 
| ЦАП |
|  ПК ПК
|
АЦП- аналогово - цифровий перетворювач;
ЦАП-цифрово-аналоговий перетворювач;
МК- мікро контролер; ПК- персональний комп'ютер.
Приклад структурної схеми інтелектуального датчика
Сучасні інтелектуальні датчики забезпечують:
1) різке зменшення спотворень вимірювальної інформації на дорозі від датчика до контролера, оскільки замість низьковольтного аналогового сигналу по кабелю, що сполучає датчики з контролером, йдуть цифрові сигнали, на які електричні і магнітні промислові перешкоди роблять незрівняно менший вплив;
2) збільшення надійності виміру завдяки самодіагностиці датчиків, оскільки кожен датчик сам оперативно повідомляє операторові факт і типа виникаючого порушення, тим самим виключаючи використання для управління неякісних і недостовірних вимірів;
3) можливість використання принципів виміру, що вимагають досить складної обчислювальної обробки вихідних сигналів сенсора, але переваг, що мають ряд, перед традиційно використовуваними принципами виміру по точності, стабільності свідчень, простоті установки і обслуговування датчика в процесі його експлуатації;
4) можливість проведення всієї необхідної первинної переробки вимірювальної інформації в датчику і видачі ним шуканого поточного значення вимірюваної величини в заданих одиницях вимірювання;
5) можливість передачі в систему автоматизації не лише поточного значення вимірюваної величини, але і додаткових сигналів про вихід його за межі заданих норм, а також можливість передачі по мережі не кожного поточного вимірюваного значення, а що лише змінився в порівнянні з попереднім значення, або значення, що вийшло за межі заданих норм, або значення, що вимагає дії, що управляє;
6) наявність в датчику бази даних для зберігання значень вимірюваної величини за заданий тривалий інтервал часу;
7) можливість дистанційно з пульта оператора в оперативному режимі вибирати діапазон виміру датчика, встановлювати нуль приладу;
8) реалізовувати в нім прості алгоритми регулювання, програмного управління, блокувань механізмів;
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 2593; Нарушение авторских прав?; Мы поможем в написании вашей работы!