КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Общие положения
|
|
|
|
АВТОМАТИЗАЦИЯ СТРОИТЕЛЬНЫХ МАШИН И ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ В СТРОИТЕЛЬСТВЕ
Существенное повышение эффективности строительного производства обеспечивается путем постоянного совершенствования технологии, организации, управления и используемого оборудования. Одновременно основное значение в указанных видах работ приобретает не только механизация, но и автоматизация и роботизация строительного производства.
Механизация и автоматизация строительного производства также постоянно совершенствуются, так как дают возможность увеличивать темпы строительства, снижать трудоемкость и стоимость работ, повышать их качество, улучшать и облегчать условия труда обслуживающего персонала, обеспечивать безопасность выполняемых работ, перейти к завершению полной механизации тяжелых и трудоемких процессов и от механизации отдельных простых процессов строительства к комплексной их механизации и автоматизации. В соответствии с этим в строительстве различают механизированные, комплексно-механизированные и автоматизированные виды работ.
При механизированных работах основные операции выполняются с помощью машин, оборудования, установок и инструментов, имеющих механический, электрический, пневматический, гидравлический и комбинированные приводы. Например, наиболее трудоемкая операция технологического процесса по отрывке грунта при производстве земляных работ выполняется экскаватором.
При комплексно-механизированных работах все основные и вспомогательные тяжелые и трудоемкие операции и процессы механизированы. В этом случае все машины, оборудование и другие средства механизации должны быть взаимосвязаны по производительности и обеспечивать заданный ведущей машиной темп работ при наивысших технико-экономических показателях. Например, при производстве земляных работ экскаватором выполняется отрывка грунта, автосамосвалом — его транспортирование, а бульдозером, автогрейдером и уплотняющей машиной (катком, трамбовкой) — зачистка, разравнивание, планирование и уплотнение грунга. При этом в указанном комплекте машин экскаватор является ведущей, а остальные — вспомогательными машинами. Так как существующие типы и: типоразмеры машин не всегда могут обеспечить полное соответствие их производительности сменному потоку работ, то необходимо всегда выявлять образующийся между ними разрыв и подбирать такое сочетание, при котором не полностью используются только наиболее дешевые в эксплуатации машины или же ввод этих машин осуществлять на определенных этапах работ.
|
|
|
Автоматизация производственных процессов включает в себя понятия «автоматика» и «автоматизация», которые не следует отождествлять. Автоматика — отрасль науки и техники, разрабатывающая георию и методы автоматизации производственных процессов, а автоматизация — это применение технических средств автоматики, освобождающих человека частично или полностью от непосредственного участия в производственном процессе.
При автоматизированных процессах различают частичную, комплексную и полную автоматизацию.
Частичная автоматизация предусматривает применение автоматического оборудования, приборов и устройств на отдельных, преимущественно основных производственных операциях. Большинство строительных машин и оборудования оснащено такими приборами и устройствами для отключения или ограничения действия машин и их рабочих органов, учета работы, регулирования скорости движения рабочих органов, траектории их движения глубина копания траншей с заданным.уклоном для землероино-транспортных машин, подача сборных элементов к месту их установки по кратчайшему пути для монтажных кранов и др.) и т. д.
|
|
|
Комплексная автоматизация предусматривает применение системы связанных в единую технологическую линию отдельных агрегатов, машин, Приборов и устройств, осуществляющих все (как основные, так и вспомогательные) операции производственного процесса. При этом оператором или машинистом выполняются только операции пуска и остановки, а поддержание заданных параметров производственного процесса во всех его звеньях происходит автоматически.
Полная автоматизация позволяет выполнять не только все основные и вспомогательные производственные операции, но и полностью осуществлять автоматическое управление и контроль за процессами, в том числе изменение по заданной программе параметров и вида продукции.
В строительстве и промышленности строительных материалов автоматизированы производственные процессы на асфальто- и цементобетонных заводах, заводах железобетонных изделий и домостроительных комбинатах, а также на строительных, дорожных машинах и оборудовании при выполнении отдельных, обычно основных, операций.
Средства автоматизации разделяют на устройства управления, защиты, регулирования и контроля. В каждой строительной и дорожной машине используются различные комбинации указанных видов устройств, однако основным направлением является автоматизация управления рабочими органами. Управление по степени участия в нем человека можно разделить на неавтоматическое, автоматизированное и автоматическое. При этом следует отметить, что' в последнее время существенно изменилась аппаратура управления, используемая в строительных и дорожных машинах. Рассмотрим указанные системы управления и общие понятия автоматизации производственных процессов.
Неавтоматическое управление машиной бывает ручное и механизированное. В первом случае человек сам определяет необходимые действия по управлению технологическим процессом, осуществляет и контролирует их визуально или по показаниям простейших приборов.
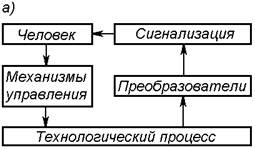
Во втором случае технологический процесс (рис.2,а) управляется с помощью исполнительных механизмов, использующих дополнительную энергию (электрическую, сжатого воздуха или рабочей жидкости). При этом приборы через соответствующие преобразователи только информируют человека о нарушениях технологического процесса.
|
|
|
| 
|
| |
| Рис.2. Структурная схема систем управления |
При автоматизированном управлении (рис.2,б) часть операций технологического процесса осуществляется механизмами управления без участия человека. В этом случае сигналы преобразователей о нарушении технологического процесса принимаются не только приборами сигнализации, но и сервомеханизмами. Последние, воздействуя самостоятельно на механизмы управления, могут остановить действие рабочего органа или всей машины. на долю человека приходится работа по устранению неисправности (повторного запуска машины в работу.
Автоматическое управление (рис.2,в) предусматривает управление по командам преобразователей или программного механизма. Эта система состоит из двух основных частей: контролирующей I и управляющей II. При таком управлении человек занят только предварительной установкой определенной программы (алгоритма), устранением неполадок по сигналам преобразователей (регулировка и ремонт механизмов), а также пуском машины в работу или ее отключением. Так, в смесительных установках смеси различных марок готовятся каждая по своей технологии. Алгоритм технологического процесса для каждой марки смеси закладывается в память программного механизма, который и управляет последовательностью выполняемых операций от начала и до окончания каждого цикла в течение смены. При этом человек только устанавливает код требуемой программы управления для получения необходимой марки смеси. Запуск в работу и остановка машины при той системе управления осуществляются в определенной последовательности: при пуске электрическая цепь каждого двигателя предыдущего рабочего органа машины может быть включена только после пуска электрической цепи двигателя последующего рабочего органа и наоборот — при отключении машины. Таким образом, рассмотренное управление технологическими процессами осуществляется системой автоматического управления (САУ), представляющей совокупность взаимодействующих между собой управляемого объекта и управляющего устройства без непосредственного участия человека и независимо от его квалификации. Автоматическое управление может быть местным и дистанционным и управлять работой одного или нескольких объектов (установок, машин, оборудования). Разновидностью автоматического управления является система автоматического регулирования (САР), поддерживающая постоянство или изменение по требуемому закону физической ветчины, характеризующей управляемый процесс. Здесь же следует отметить, что наряду с управлением и регулированием, в машинах используется и система автоматического контроля (САК) за состоянием объекта (узлов машины), за характером протекания технологического процесса или достижением предельных значений параметров как в машине и ее узлах, так и в готовой продукции (строительные материалы, сооружения).
|
|
|
Автоматизированное и автоматическое управление производственными процессами преимущественное распространение получило на предприятиях по изготовлению асфальтобетонных и цементобетонных смесей, а также при изготовлении серийных железобетонных изделий (плит, колонн, блоков и т.п.). Однако автоматизация все шире применяется в строительных и дорожных машинах при выполнении как отдельных операций, так и различных их комбинаций. В большой степени этому способствует широкий перевод большинства рассматриваемых машин на гидравлические (в основном объемные), системы управления рабочими органами. В отличие от механических эти системы позволяют снизить металлоемкость, эффективней использовать возможности регулирования положения рабочих органов или самой машины в пространстве и обеспечить повышение качества выполняемых работ и производительности.
В соответствии с этим в настоящее время для землеройных (одноковшовые, многоковшовые, цепные экскаваторы и т. п.), землеройно-транспортных (скреперы, бульдозеры, автогрейдеры и т. п.) и дорожных (катки, асфальто- и бетоноукладчики) машин, а также для стреловых самоходных и башенных кранов разработаны и внедряются микропроцессорные системы управления, регулирования, диагностики и безопасности.
При этом следует отметить особенности устройства и работы большого разнообразия и различного назначения строительных машин, которые должны быть положены в основу при разработке соответствующих систем управления. В строительных машинах, особенно в землеройно-транспортных и дорожных, необходимо управлять одновременно несколькими параметрами, такими как курс машины, продольный и поперечный уклон, оптимальная загрузка приводного двигателя при минимальном расходе топлива, подача и температура укладываемых материалов, осуществлять независимое регулирование в многоконтурных системах, компенсировать воздействия на объекты управления нагрузок от неровности поверхности земли и дороги, неоднородности разрабатываемой среды и распределяемых технологических материалов, температуры окружающего воздуха и скорости ветра, регулировать параметры в широком диапазоне времени (от долей секунды до нескольких часов) и т. д. Помимо этого для выбора требуемых параметров в машинах необходимо использовать специальные бортовые микроЭВМ.
В связи с развитием комплексной автоматизации в последнее время большое распространение в строительстве получают роботы и различные манипуляторы. Под манипулятором понимают механизм, осуществляющий под управлением оператора действия, аналогичные действиям руки человека. Строительный манипулятор не имеет в своей системе управления никаких вычислительных устройств. Однако для обеспечения ориентационного управления (т.е. точного позиционирования) в состав строительного манипулятора могут входить различные информационно-измерительные устройства (лазерные, телевизионные, радиоанализаторные). Строительный робот — это манипулятор с системой автоматического управления, праммирование которым осуществляется посредством специальной рукоятки управления.
КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИКИ
Автоматические системы, используемые в строительных:мащинах. и оборудовании для контроля, регулирования и управления, можно классифицировать по ряду признаков.
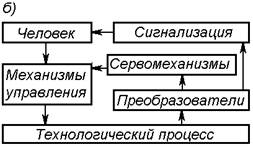
По характеру алгоритма управления различают системы по разомкнутому и замкнутому (с обратной связью) циклам, а также комбинированные системы. В первом случае в системе отсутствует обратная связь и управление является жестким. В такой системе (рис.3, а) задающий сигнал Х поступает в управляющее устройство УУ, из которого сигнал управляющего воздействия УВ направляется к объекту
 Рис.3. Системы автоматического управления: а — по разомкнутому циклу; б — по замкнутому циклу; в ‑ по комбинированной схеме
Рис.3. Системы автоматического управления: а — по разомкнутому циклу; б — по замкнутому циклу; в ‑ по комбинированной схеме
|
управления ОУ для получения выходных координат У с учетом возможного воздействия сторонних помех F. При управлении по замкнутому циклу (рис.3,б} в случае отклонения выходного параметра от заданного значения сигнал возвращается объектом управления на управляющее устройство для корректировки, Такие системы работают с изменяемыми структурой и законом управления. Комбинированное управление (рис.3,в ) характеризуется начием в системе обратной связи и резервного управляющего устройства, подключаемого параллельно первому через элемент сравнения (анализатор). Установленные на схемах знаки «плюс» и «минус» характеризуют положительные или отрицательные значения задающего воздействия.
Устройства обратной связи объединяют под понятием «регуляторы», которые различают как регуляторы прямого (использующие энергию объекта) и непрямого (требующие дополнительного электроснабжения— усилителя) действия. В зависимости от числа каналов обратной связи различают одноконтурные и многоконтурные системы, и последних всегда более одной замкнутой цепи воздействия.
По характеру применяемых сигналов различают непрерывные и дискретные (импульсные, релейные) системы.
По характеру изменения сигналов задатчика системы делят на стабилизирующие, программного управления и следящие. В стабилизирующих системах по поступающим постоянным сигналам выходные параметры поддерживаются практически с постоянными значениями (например, стабилизация температуры двигателя). В системах программного управления сигналы из задающего устройства меняются по заранее установленным законам и выходные параметры также изменяются во времени и пространстве. В следящих системах значения заранее неизвестны и из блока задающего устройства поступают случайно изменяющиеся сигналы, измеряемые соответствующими датчиками. Эти системы, в свою очередь, делятся на автономные, копирные и комбинированные.
По количеству выходных параметров различают одномерные и многомерные системы.
По расположению измерительных и сигнальных устройств относительно управляемого объекта и по его расположению относительно пульта автоматические контроль и управление разделяют на местные и дистанционные. Местный контроль и управление наибольшее распространение получили в передвижных, в том числе в строительных машинах. Дистанционный контроль и управление используют при одновременной работе с несколькими машинами или для приближения его к месту выполнения технологических операций рабочим органом машины. При этом значительно увеличивается роль каналов связи, осуществляющих передачу сигналов на расстояние. В качестве каналов связи используются механические, гидравлические, пневматические, электрические и комбинированные (смешанные) передачи.
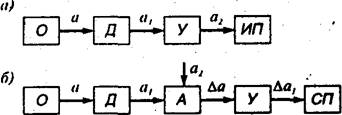 Рис.4. Блок-схемы САК
Рис.4. Блок-схемы САК
|
Рассмотрим блок-схемы основных автоматических систем, используемых для контроля, управления и регулирования. Системы автоматического контроля (САК) работают по разомкнутому циклу и могут быть как прямого, так и непрямого действия. В блок-схеме системы автоматического контроля непрямого действия (рис.4,а). контролируемая величина а с объекта О, осуществляющего производственный процесс, подается на датчик Д, передающий сигнал а 1 дальше на усилитель У, от которого сигнал а3 поступает на измерительный преобразователь ИП.
При использовании в качестве конечного элемента сигнального преобразователя (рис.4,б) система автоматического контроля усложняется. В этом случае контролируемая величина а объекта О также подается на датчик Д. Однако в дальнейшем сигнал а1 от датчика поступает в сравнивающее устройство (анализатор) А. В анализаторе происходит сравнение сигнала а1 с сигналом а 2, который должен быть равен сигналу а1 в соответствий с заданным значением величины а. При несовпадении сигналов а1 и а2 анализатор посылает сигнал Δа об отклонении контролируемой величины а от заданного параметра. После прохождения усилителя У сигнал Δа1 поступает на сигнальный преобразователь СП. В отличие от рассмотренных схем автоматического контроля в системах прямого действия отсутствует усилитель.
По числу контролируемых величин различают единичный и множественный автоматический контроль, в одном из которых осуществляется контроль только одного параметра рабочего процесса и. только в одном месте, а во втором — контроль нескольких параметров или одного параметра в нескольких местах при выполнении определенного технологического процесса. Множественный контроль, в свою очередь, делится на параллельный, последовательный и смешанный, представляющий сочетание из двух основных. При параллельном контроле используется необходимое количество каналов, обеспечивающих контроль всех измеряемых параметров во всех местах их расположения. Последовательный контроль позволяет получить информацию от нескольких датчиков к одному сигнальному преобразователю или же датчик, имеет возможность перемещаться поочередно к различным местам получения информации.
Системы автоматической защиты (САЗ) также работают по разомкнутому циклу и в большинстве случаев являются системами непрямого действия, так как для подачи звуковых и световых предупреждающих сигналов, а также для отключения энергоснабжения машины или отдельных ее узлов мощность сигнала, получаемого от датчика, недостаточна. В отличие от блок-схемы системы автоматического контроля здесь в конце цепи обычно используют реле или контактор, отключающие управляющие цепи привода объекта, а также применяют параллельное включение различных датчиков на один сигнальный прибор или устройство релейной защиты.
Системы автоматического управления (САУ) в основном работают по разомкнутому циклу, так как не получают информацию о действительном протекании технологического процесса, и практически всегда являются непрямого действия: В блок-схеме этого управления. (рис.5) задающий сигнал а поступает в управляющее устройство УУ, из которого сигнал а1 о необходимости управления объектом поступает в
 Рис.5. Блок схема САУ
Рис.5. Блок схема САУ
|
усилитель У. Усиленный сигнал а2 поступает в исполнительный орган ИО, оказывающий требуемое воздействие а3 на объект управления ОУ. Автоматическое управление бывает непрерывным и дискретным, по количеству управляемых объектов — единичным и множественным, а также местным и дистанционным. Примером местного единичного управления является работа однозубого рыхлителя по заданной программе.
Дистанционное множественное управление широко используется в асфальто- и цементобетонных установках и заводах.
Системы автоматического регулирования (САР) являются разновидностью автоматического управления и предназначены для сопоставления действительного значения параметров выполняемого процесса с заданным и с дальнейшим управлением объектом в зависимости от результатов сопоставления (т.е. управление с использованием информации о результатах управления).
В соответствии с этим система автоматического регулирования осуществляет не только управление объектом, но и одновременный контроль за его правильной работой. Следует также отметить, что в системах автоматического регулирования рассматривается совместная работа регулируемого объекта и регулирующих устройств.
К регулирующим устройствам относятся автоматические регуляторы, позволяющие без участия человека выдерживать заданные параметры с требуемой степенью точности. Так как автоматический регулятор воздействует на регулируемый объект, а регулируемые параметры воздействуют на регулятор, вызывая в нем требуемое управляющее воздействие, цепь воздействия оказывается замкнутой и система работает с обратной, связью.
В соответствии с используемой, по характеру изменения сигналов задатчика, системой (стабилизирующая, программная, следящая) изменяется и состав автоматического регулятора. Однако в общем случае блок-схема практически не изменяется. Рассмотрим состав и работу блок-схемы системы автоматического регулирования для ее различных видов.
Блок-схема системы автоматического регулирования (рис.6) включает в себя объект регулирования ОР и автоматический регулятор АР, все элементы которого расположены внутри прямоугольника, обозначенного на схеме пунктиром. Регулируемый параметр а поступает из объекта регулирования ОР на датчик Д, откуда сигнал а1 поступает в анализатор А, где сопоставляется с заданным значением регулируемого параметра а2 - При значительном расхождении параметров а1 и а2 анализатор подает о полученной разницесигнал Δа=с в усилитель У. Усиленный сигнал с1 поступает в исполнительный орган ИО; изменяющий рассогласованный сигнал и передающий отрегулированное воздействие с2 на объект регулирования ОР.
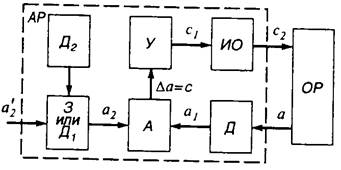 Рис.6. Блок схема САР
Рис.6. Блок схема САР
|
При различных видах систем автоматического регулирования в них вводятся дополнительные устройства.
В стабилизирующей САР вводится задатчик З, подающий постоянный сигнал а2 (соответствующий такому сигналу а1, который появляется в датчике Д при соразмерности регулируемого параметра а заданному постоянному значению) в анализатор А.
В программной САР сигнал а2, изменяющийся по заданному закону во времени, подается в анализатор А также от задатчика З. Однако для перемещающихся во время работы машин, регулируемые параметры которых изменяются по заданной функций пути, сигнал задатчика связан с длиной пройденного пути, измеряемого дополнительным датчиком времени или пройденного пути Д2.
В следящей САР вместо задатчика используется дополнительный датчик Д1, измеряющий значение внешней переменной величины а2 в соответствии с которой регулируется параметр а. Различают САР прямого и непрямого действия, непрерывные и дискретные, одно- и многоконтурные и т.д.
Наряду с вышерассмотренными, в системе автоматического регулирования используется и самонастраивающаяся (адаптивная) система, определяющая путем автоматического поиска такое значение регулируемого параметра, которое обеспечивает наивыгоднейший режим работы регулируемого объекта при изменяющихся условиях его работы.
В качестве рабочих элементов в автоматических системах управления, регулирования, контроля и защиты используются датчики и устройства контроля и регулирования, усилители, микропроцессоры и исполнительные механизмы.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 297; Нарушение авторских прав?; Мы поможем в написании вашей работы!